(54) МАНИПУЛЯТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| Роботизированное устройство для внесения гербицидов в приствольные полосы сада | 2020 |
|
RU2739156C1 |
| Установка для изготовления петель на концах каната | 1974 |
|
SU524875A1 |
| ГИДРАВЛИЧЕСКАЯ СИСТЕМА РЕГУЛИРОВАНИЯ УГЛА УСТАНОВКИ ЛОПАСТЕЙ ВЕТРОТУРБИНЫ | 2015 |
|
RU2605490C2 |
| Система управления четырехгусеничной машиной | 1989 |
|
SU1682230A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ | 1994 |
|
RU2113396C1 |
| АВТОМАТИЧЕСКОЕ УСТРОЙСТВО СНИЖЕНИЯ КУРСОВОГО УВОДА ПРИЦЕПА ТРАКТОРНОГО ПОЕЗДА | 2004 |
|
RU2270102C2 |
| Сельскохозяйственный агрегат | 1983 |
|
SU1165250A1 |
| ФИКСИРУЮЩЕЕ ПРИСПОСОБЛЕНИЕ ДЛЯ РАБОЧИХ ОРГАНОВ | 1971 |
|
SU320960A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ВОЖДЕНИЯ МАШИННО-ТРАКТОРНОГО АГРЕГАТА | 2000 |
|
RU2181232C1 |
| Приспособление к фрезерному станку для автоматического прорезания шлицев в петушках коллектора | 1953 |
|
SU99608A1 |
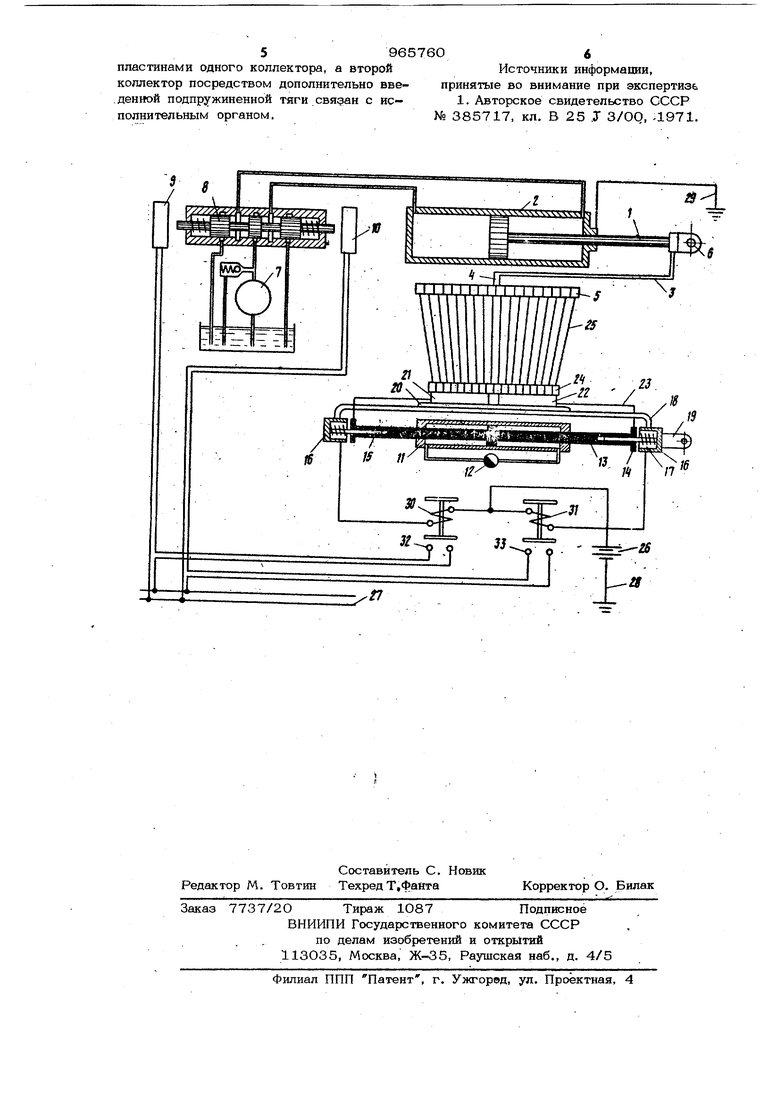
Изобретение относится к робототехнике в частности к автоматизированным устрой ствам для дистанционного управления движением питейного ковша в металлургическом производстве. Известны манипуляторы, содержащие исполнительный и задающий органы, а так же следящую систему управления приводом исполнительного органа, имеющую распределительное устройство в виде золотни- . Недостатками известных устройств являются юс узкие технологические возможности из-за отсутствия возможности масштабирования линейных перемещений задающего и исполнительного органов. Цель изобретения - расширение технологических возможностей nyTeivi обеспечен НИИ переменной величины линейных перемещений задающего и исполнительного органов в единицу времени. Поставленная цель достигается тем, что манипулятор снабжен электромагнит ной системой, имеющий источник элекч {жческого тока, два магнитных пускателя обмотки которых связаны между собой, с источником питания и с задающим ор- , ганом, а также два коллектора, соответствующие пласт ины каждого из которых электрически связаны между собой, причем задающий орган выполнен в виде скобы, шарнирно установленной на оси, .подпружиненной относительно нее и несущей контактные шины, предназначенные для взаимодействия с пластинами одного коллектора, а второй коллектор посредством дополнительно введенной подпружиненной тяги связан с исполнительным органом. На чертеже представлена схема предлагаемого манипулятоа. На штоке 1 гидроциливдра 2 установлена пружинная тяга 3 с контактом 4, который скользит по коллектору 5 из набора изолированных друг от друга пластин. Вилка 6 является соединител| ным звеном для передачи движений последующему звену. Гидроцилиндр 2, с коллектором 5 является исполнительным органом манипуля- , тора. Силовая гидроустановка имеет насос 7, распределительный золотник 8 и электромагниты 9 и 10. Задающий орган манипулятора имеет гидроцилиндр 11с дросселем 12. Шток 13 поршня (ось задающего органа) снабжен изолированными контактными пластинами 14. Стержни 15 имеют контакты-стаканы 16. Пружины 17 в свободном состоянии образуют зазоры между стаканами 16 и пластинами 14. .Стаканы 16 соединены скобой 18, подпружинены на шток 15 и изолированы дру )т друга. Движение щток 13 получает через вилку 19. На скобе 18 на изоляторе 20 установлены контактные шины 21 и 22, из которых соединена проводом 23 с соответствующей пластиной 14. Шины 21 и 22 скользят по коллектору 24, который представляет набор изолированных друг от друга пластин. Каж дая пластина коллектора 24 электрическим проводом 25 соединена с соответствующей пластиной коллектора 5. Расстояние между шинами 21 и 22 немного боль ше толщины пластины, коллектора 24, еле- довательно шины 21 и 22 одновременно не могут контактировать с одной пластиной коллектора. Электромагнитная систем имеет низковольтный источник 26 тока. коллекторы 5 и 24, силовую электромагистраль 27, соединения на массу 28 и 29и магнитные пускатели 30 и 31 с контактами 32 и 33. Обмотки пускателе 30и 31 связаны между собой, с источником 26 и с задающим органом. Манипулятор работает следующим образом. Движения штока 1 точно соответствуют движениям скобы 18 и производятся в зависимости от движения скобы с шинами 21 и 22. Но путь и скорость больш у штока 1 во столько раз, во сколько длина коллектора 5 больше длины коллектора 24. Гидроцилиндр 11 обеспечивает равномерное движение штока 13 с определенной скоростью. Дроссель 12 настраи вается с таким расчетом, что время полного хода штока 13 равно времени полно го хода штока 1. При подаче скобы 18 задающего органа вправо будут подаваться вправо и шины 21 и 22. В первый момент движения левый стакан 16 сконтактирует с левой пластиной 14 и образуется замкнутая электрическая цепь: масса 28 - източник тока 26 - электромагнит 30 -ь левый с такан. .16 ,- левая пластина 14 - левый провод 23 - шина 21 - пластины коллектора 24 - 25 - пластрны коллектора 5 - контакт 4 - тяга 3 - шток 1 -.масса 29. От замыкания цепи сработает магнитный пускатель 30, замкнутся контакты 32, сработает электромагнит 9, и золотник 8 передвинется влево, масло будет подаваться в левую полость гидроцилиндра 2 и шток 1 пойдет вправо. Так перемещается исполнительный орган манипулятора. Движение штока 1 будет продолжаться с движением скобы 18 по мере контакти- , рования шины 21с последующей пластиной коллектора 24. При остановке скобы 18 пружина 17 разомкнет левый стакан 16 с левой пластиной 14, электрическая цепь разомкнется и вьшлючится электромагнит 30, разомкнутся контакты 32 и выключится электромагнит 9, золотник 8 станет в среднее положение, прекратится подача масла и шток 1 остановится. При дальнейшей подаче вправо скобы 18 после ее -остановки все произойдет аналогично. При подаче скобы. 18 влево Действия будут аналогичны, ко .т электромагниты 31 и 10 и пбйдет в правую полость цилиндМанипулятор позволяет изменять масштаб перемещения исполнительного органа при постоянном перемещении задающего органа. Ф-орм-ула изобретения Манипулятор, содержащий исполнительный и задающий органы, а также следящую систему управления приводом испол- нительного органа, имеющую распределительное устройство в виде золотника, о тличающийся тем, что, с целью расширения технологических возможностей путем обеспечения переменной величины линейных перемещений задающего и исполнительного органов в единицу времени, он снабжен электромагнитной системой, имеющей источник электрического тока, два магндтных пускателя, обмотки кото- рых связаны между собой, с источником питания и с задающим органом, а также два коллектора, соответствующие пластины каждого из которых электрически связаны между собой,причем задающий оргаи выполнен в виде скобы, шарнирно установленной на оси, подпружиненной относительно нее и несущей контактные шины, предназначенные для взаимодействия с
59657606
пластинами одного коллектора, а второйИсточники информации,
коллектор посредством дополнительно вве- принятые во внимание при экспертизь .денной подпружиненной тяги свядан с ис-1. Авторское свидетельство СССР
полнительным органом,№ 385717, кл, В 25 J З/ОО, 1971.
