(5) КАНТОВАТЕЛЬ
| название | год | авторы | номер документа |
|---|---|---|---|
| Кантователь крупногабаритных конструкций | 1991 |
|
SU1794521A1 |
| Кантователь плитных изделий | 1979 |
|
SU846500A1 |
| Кантователь для периодического продольного перемещения и поворота на 90 @ изделий | 1988 |
|
SU1556855A1 |
| Кантователь | 1979 |
|
SU804316A1 |
| УСТАНОВКА ДЛЯ САДКИ СЫРЦЫ-КИРПИЧА НА ПЕЧНУЮ ВАГОНЕТКУ | 1992 |
|
RU2043192C1 |
| Кантователь изделий | 1987 |
|
SU1553517A1 |
| КАНТОВАТЕЛЬ (ВАРИАНТЫ) | 2016 |
|
RU2638997C1 |
| Кантователь изделий | 1981 |
|
SU988704A1 |
| Кантователь | 1990 |
|
SU1815095A1 |
| Кантователь | 1984 |
|
SU1186448A1 |
1
Изобретение относится к грузоподъ мным устройствам и может быть использовано для кантования изделий, преимущественно в форме параллелепипеда, например блюмов и слябов.
Известен кантователь, содержащий основание, на котором установлены поворотные на оси платформы с выступами и индивидуальными приводами, один из которых выполнен в виде силовых пнёв- fg моцилиндров, шарнирно соединенных с основанием и одной из платформ, на которой установлены ролики с профилированной поверхностью l .
Недостаток известного устройства is заключается в его низкой надежности.
Целью изобретения является повышение надежности путем устранения удара изделия о платформы и схода изделия с платформы при выходе из 20 строя любого из приводов.
Цель достигается тем, чТо оси по,ворота платформ расположены на разных уровнях, при этом одна из платформ выполнена со щеками, .взаимодействукицими с роликами.
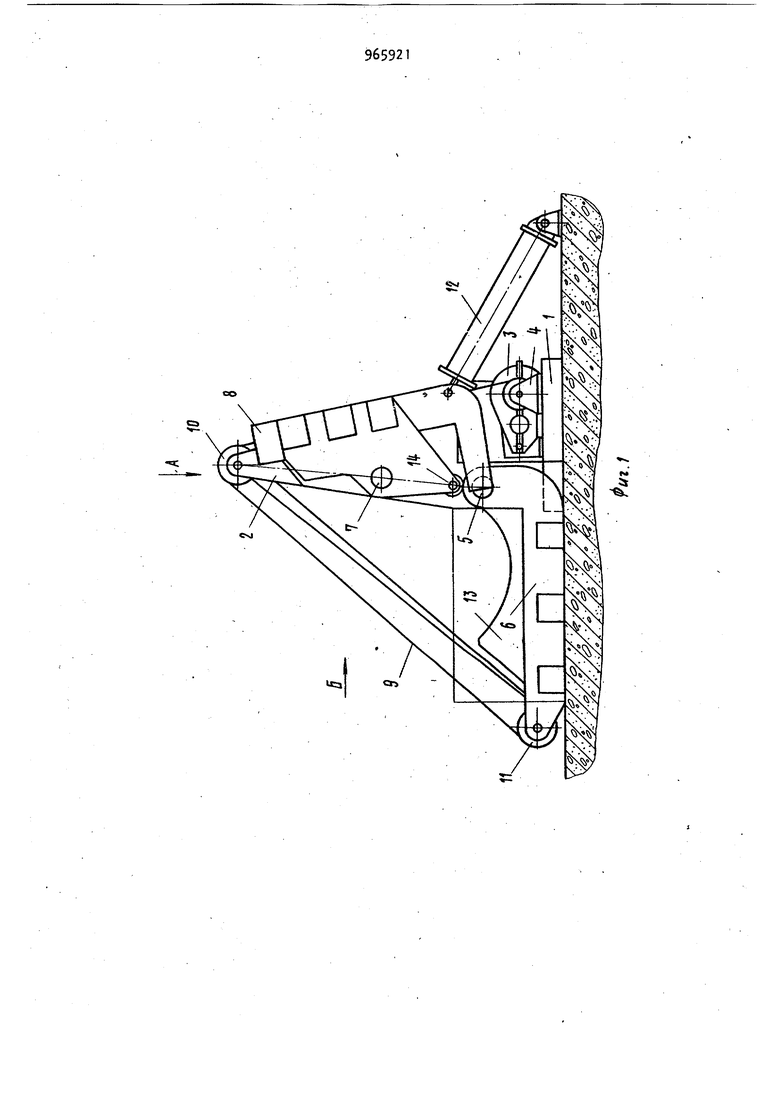
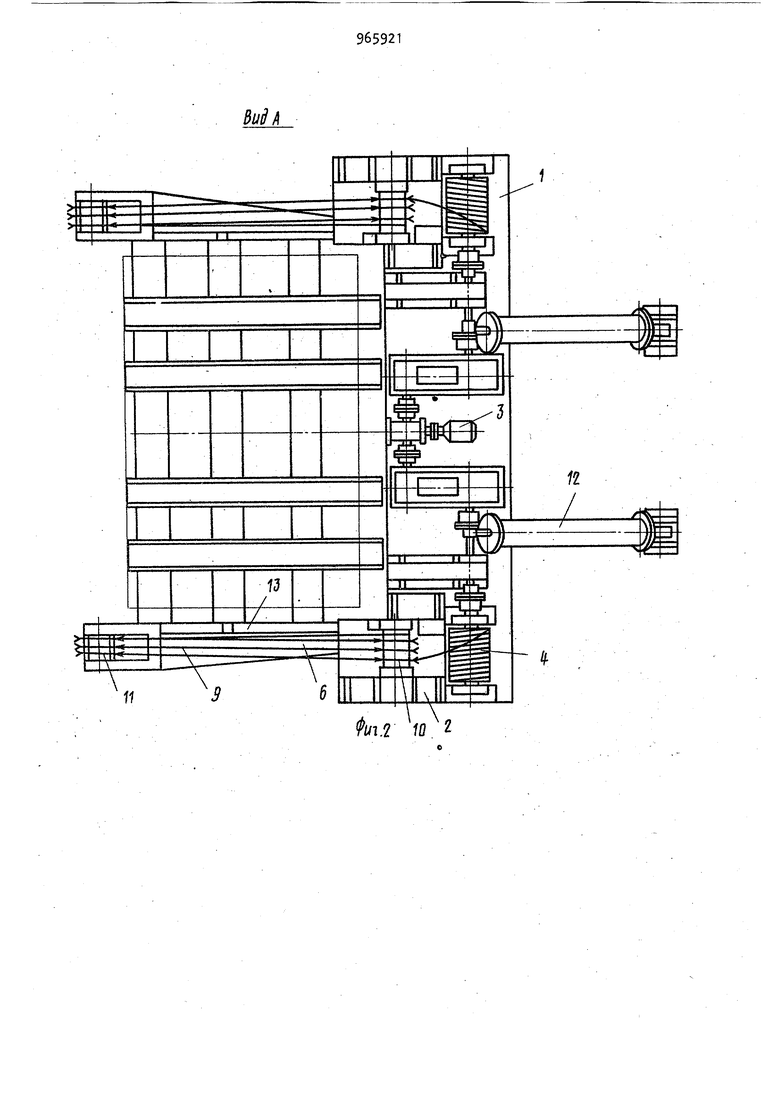
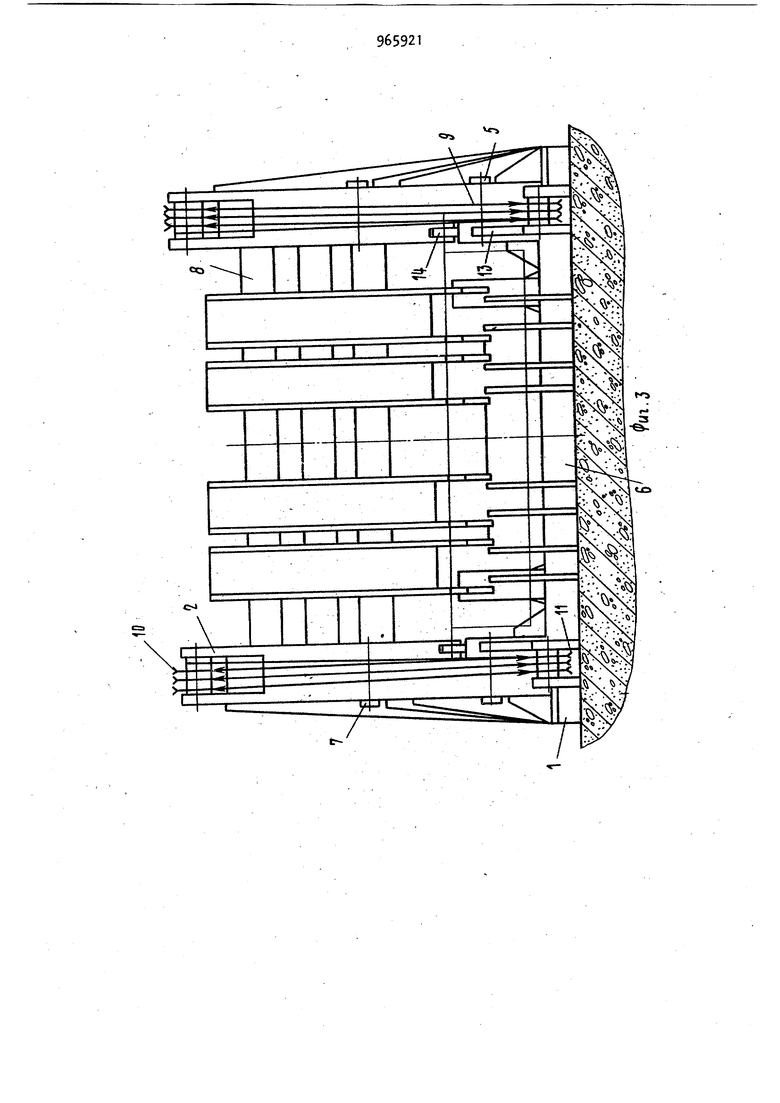
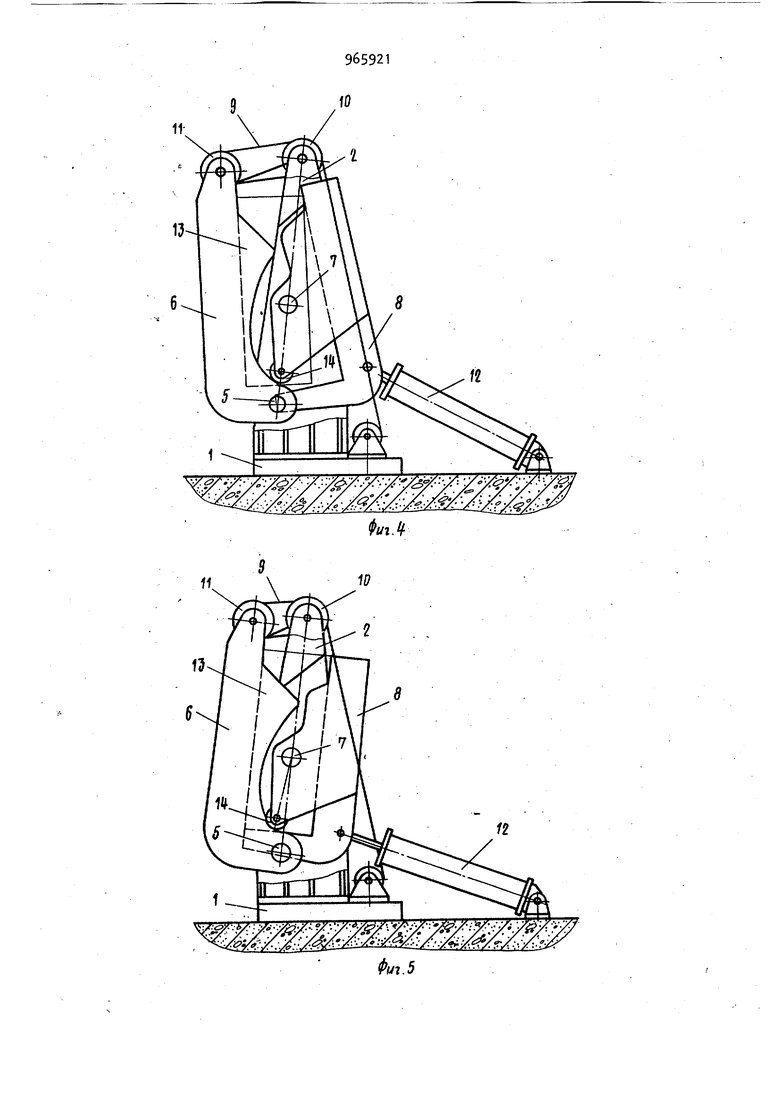
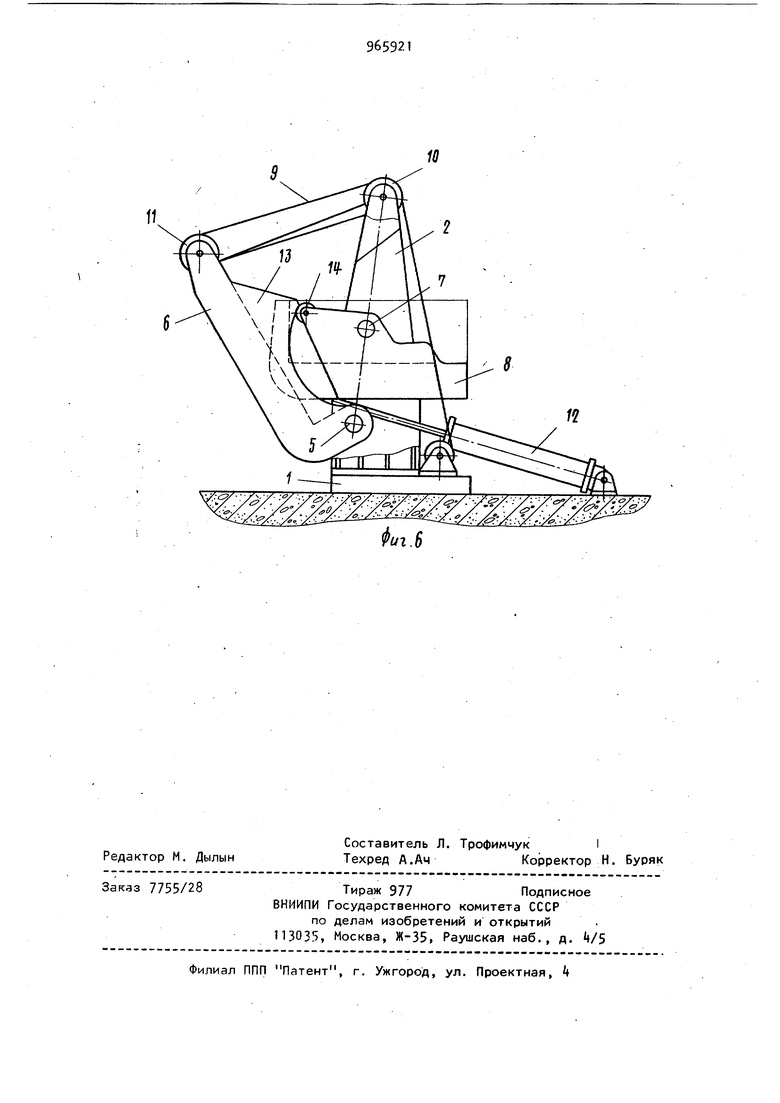
На фиг. 1 изображена предлагаемая конструкция в положении, характерг ном для начала кантования изделия, вид сбоку; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - вид Б на фиг.1; на фиг. - положение кантователя в момент качала силового замыкания плат форм и изделия на фиг. 5 - положение кантователя в момент схода изделия с одной платформы на другую; на фиг. 6 - .Положение кантователя в момент конца кантования изделия.
На основании фундамента установлена рама 1, на которой расположены стойки 2, привод 3 с двумя лебедками 4. На стойках 2 подвешены на осях 5 платформа 6 и на осях 7 платформа 8. Лебедки k при помощи тросов 9 соединены с блоками 10 и 11, пер;вые из которых установлены на стой3ках 2, а вторые - на платформе 6, Нижняя часть платформы 8 шарнирно соединена с пневмогидроцилиндром 12 другой конец которого шарнирно соединен с основанием фундамента. По бокам платформы 6 установлены щеки 13 с профильной поверхностью, которая контактирует с роликами И на платформе 8. Работа кантователя происходит следующим образом. На платформу 6 укладывают издели (в данном случае сляб). В это время платформа покоится в горизонтальном положении на основании, а платформа 8 занимает вертикальное положение под угдом, превышающим 90. Включают привод 3, вращение ко tdporo через лебедки , системутр сов 3 и блоков 10 и 11 передается платформе 6. При-повороте платформы 6 вокруг оси.5 на угол, значение которого ниже 90, происходит силовое замыкание системы платформ 6- изделие - платформа 8. При дальнейшем повороте платформы 6 изделие переходит вертикальное положение и вместе с платформой 8 отклоняется на угол, меньший 90, т.е. поворот и делия из положения под углом, боль шим 90°, в положение под углом, мен шим 90, осуществляется в силовом взаимодействии платформы 6, изделия и платформы 8. Существенное значение при этом имеет вид силового при вода платформы 8 (пневмоцилиндр), позволяющий осуществлять поджатие платформы 8 м изделию в период сило вого взаимодействия, в результате чего обеспечивается плавный переход изделия с одной платформы на другую В конце силового взаимодействия си.стемы платформа 6 - изделие - платформа 8 ролики It касаются профильной поверхности щек 13 на платформе 6, которые препятствуют повороту платформы В. Для того, чтобы платформа 8 под воздействием пневмо цилиндра 12 начала вращение, необходимо включить привод 3. При этом платформа 6 начинает отклоняться в исходное положение, а платформа 8 по мере обкатывания роликов 14 по профильным поверхностям щек 13 начи нает поворачиваться вокруг оси 7 до тех пор, пока изделие не займет вместе с платформой 8 горизонтально го положения. В конце кантования из делия ролики И-всё еще находятся в 14 контакте с профильной поверхностью щек 13, т.е. сохраняется силовое взаимопействие между платформами 6 и 8 и их приводами 3 и 12, что исключает сход изделия с платформ при выходе из строя любого из указанных приводов. После того, как процесс кантования изделия прекратится, привод 3 поворачивает платформу 6 в исходное положение. Затем снимают изделие с платформы 8 и при помощи пневмоцилиндра 12 приводят ее в исходное положение, т.е. поворачивают на угол, превышающий 90 . Для осуществления нормальной работы заявляемого кантователя необходимо, чтобы угловая скорость поворота платформы 6 была ниже возможной угловой скорости поворота платформы 8. Кантование слябов на предприятии производят при помощи мостового крана, грузоподъемность которого в несколько раз превышает массу сляба из-за наличия значительных динамических нагрузок, возникающих в процессе кантования. Применение предлагаемого кантователя позволяет не только снизить трудоемкость процесса кантования и затраты на оборудование, но и повысить безопасность работы. Формула изобретения Кантователь, содержащий основание, на котором установлены поворотные на осях платформы с выступами и индивидуальными приводами, один из которых выполнен в виде силовых пневмоцилиндров, шарнирно соединенных с основанием и одной из платформ, на которой установлены ролики с профилированной поверхностью, отличающ и я тем, что, с Целью повышения надежности путем устранения удара изделия о платформы и схода изделия с платформы при выходе из строя любого из приводов, оси поворота платформ расположены на разных уровнях, при этом одна из платформ выполнена со щеками, взаимодействующими с роликами. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР по заявке к° 2nkkгэ/, кл. В 66 F 9/ОА, 17.06.79.
со
.6
