Изобретение относится к конструкциям, предназначенным для кантования (поворота) изделий различного назначения, предпочтительнее космических аппаратов. Изобретение может быть успешно применено в любой области техники с учетом конструктивных особенностей кантуемых объектов.
Известна тележка-кантователь по патенту России RU №81149, состоящая из П-образной рамы с четырьмя поворотными колесами и двух вертикальных стоек, установленных на раме. Между двумя стойками закреплена съемная поворотная грузовая платформа, выполненная в виде траверсы со строповочным элементом. Привод поворота траверсы закреплен на одной из вертикальных стоек, а также фиксатор положений поворотной траверсы, установленный на ее оси вращения. Фиксатор положений поворотной траверсы представляет собой диск с отверстиями, выполненными по окружности и поочередно совпадающими с отверстием в упомянутой стойке, и стопорный штырь, входящий через отверстие в стойке в одно из отверстий на диске при повороте траверсы.
Недостатками такой тележки-кантователя являются:
- отсутствие возможности использования для широкого спектра изделий, например космических аппаратов с различными массогабаритными характеристиками в связи с неприемлемостью использования тележки-кантователя данного конструктивного исполнения для длинномерных космических аппаратов тяжелого класса ввиду пропорциональной зависимости высоты тележки-кантователя от габарита космического аппарата, что влечет за собой нерациональность конструктивного исполнения тележки-кантователя, существенное увеличение металлоемкости и габаритных характеристик, а также увеличение стоимости изготовления конструкции;
- отсутствие устройства для приведения центра масс поворотной траверсы с кантуемым изделием к оси кантования;
- отсутствие возможности поворота изделия (например, космического аппарата) вокруг его продольной оси;
- использование П-образной рамы уменьшает жесткость конструкции в целом.
Наиболее близким устройством (прототипом) к заявленному изобретению по технической сути является кантователь (патент RU №131358), состоящий из основания, на котором закреплены вертикальные стойки; грузовой платформы, привода кантования грузовой платформы, установленного на одной из стоек. Каждая стойка оснащена диском, установленным с возможностью поворота относительно общей горизонтальной оси кантования, а грузовая платформа смонтирована на дисках с возможностью ее перестановки для приведения центра масс грузовой платформы с грузом к оси кантования. На дисках имеется несколько парных отверстий, одна пара которых расположена симметрично центру диска, остальные пары выполнены на разном радиальном расстоянии от центров дисков, смещены по углу относительно друг друга и имеют возможность соединения быстросъемными штырями с аналогичными парными отверстиями грузовой платформы.
Недостатками прототипа являются:
- отсутствие возможности использования для широкого спектра космических аппаратов с различными массогабаритными характеристиками в связи с неприемлемостью использования кантователя данного конструктивного исполнения для длинномерных космических аппаратов тяжелого класса ввиду пропорциональной зависимости высоты кантователя от габарита космического аппарата, что влечет за собой нерациональность конструктивного исполнения кантователя, существенное увеличение металлоемкости и габаритных характеристик, а также увеличение стоимости изготовления конструкции;
- увеличение габаритных размеров конструкции в целом за счет размещения привода кантования грузовой платформы на одной из стоек;
- отсутствие возможности поворота космического аппарата вокруг его продольной оси;
- необходимость использования крана для приведения центра масс грузовой платформы с космическим аппаратом к оси кантования, что влечет за собой увеличение трудоемкости работ.
Задачей заявленного изобретения является устранение указанных недостатков и расширение его эксплуатационных возможностей.
Поставленная задача решается за счет применения кантователя, содержащего основание, две стойки, к которым на оси кантования закреплена грузовая платформа, снабженная поворотной планшайбой, и механизм кантования. Механизм кантования состоит из невращающегося винта, шарнирно закрепленного на одной из стоек, и электромеханического привода, перемещающегося вдоль винта при кантовании. Электромеханический привод смонтирован на грузовой платформе с возможностью его поворота вместе с грузовой платформой относительно оси кантования. При этом по первому варианту в конструкции грузовой платформы балансир со стержнями и гайками не предусмотрен. По второму варианту в конструкции грузовой платформы со стороны противоположной креплению поворотной планшайбы предусмотрен балансир с возможностью его перемещения вдоль стержней, закрепленных на грузовой платформе.
Объединение нескольких технических решений в одну заявку связано с тем, что они связаны общей задачей, решаемой за счет конструктивных особенностей устройств, которые являются равноценными для решения поставленной задачи, но не могут быть объединены обобщающим параметром.
Сущность изобретения поясняется чертежами, где изображено:
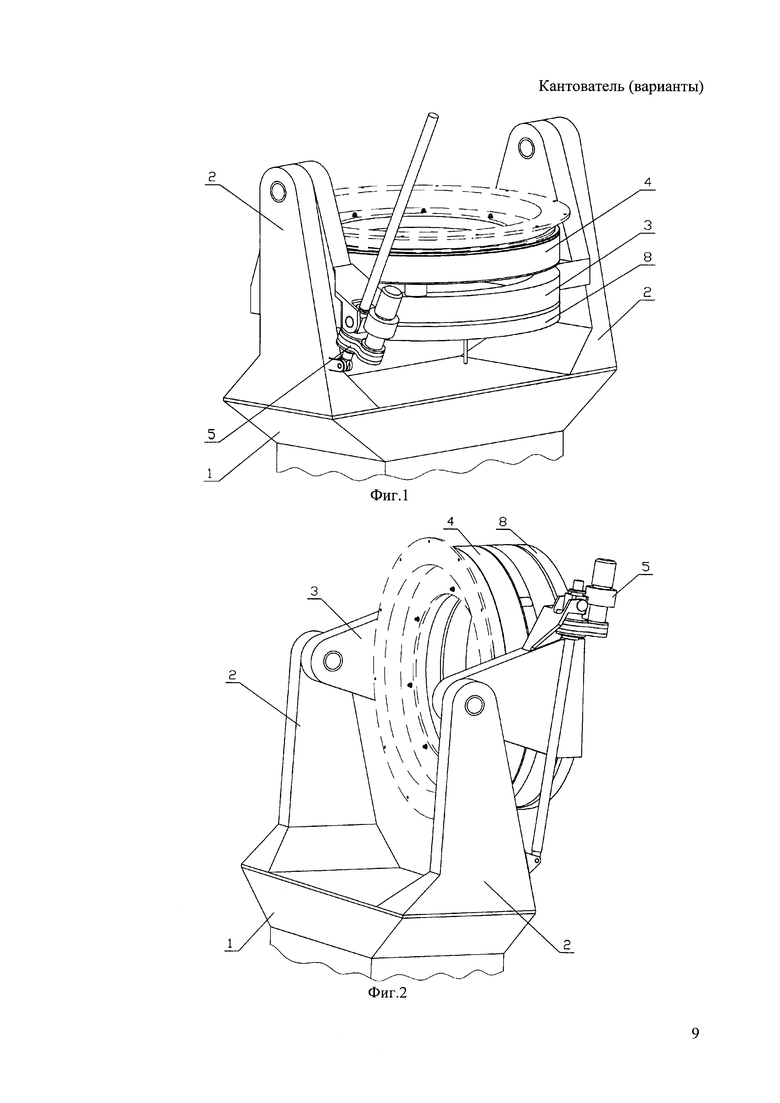
- на фиг. 1 - конструктивное исполнение кантователя и его основные элементы (планшайба кантователя в горизонтальном положении, 3d вид, пунктирной линией условно показано переходное кольцо космического аппарата);
- на фиг. 2 - конструктивное исполнение кантователя и его основные элементы (планшайба кантователя в вертикальном положении, 3d вид, пунктирной линией условно показано переходное кольцо космического аппарата);
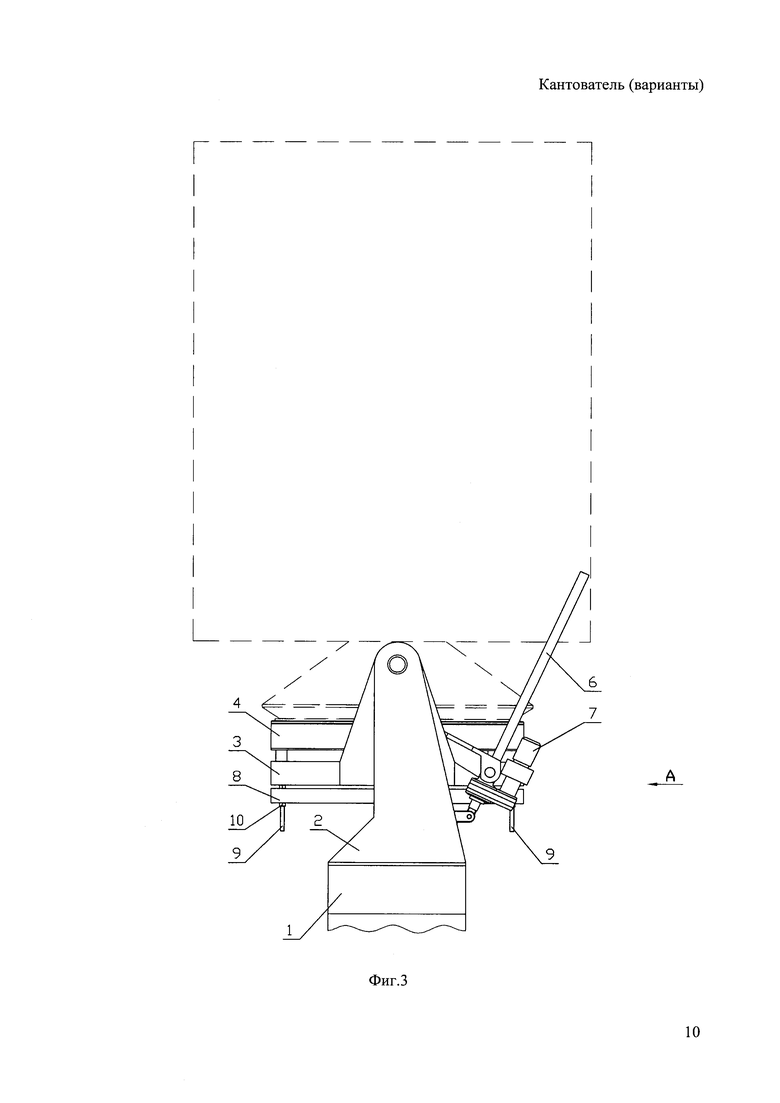
- на фиг. 3 - кантователь с космическим аппаратом в вертикальном положении (главный вид);
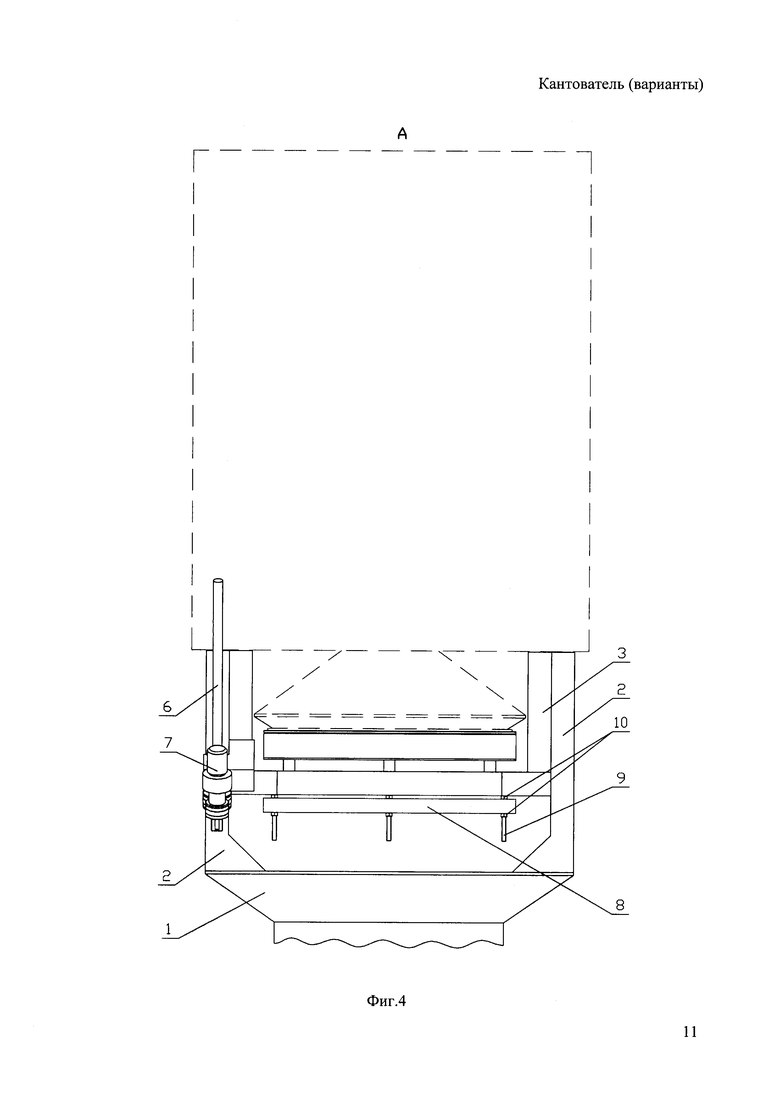
- на фиг. 4 - кантователь с космическим аппаратом в вертикальном положении (вид сбоку);
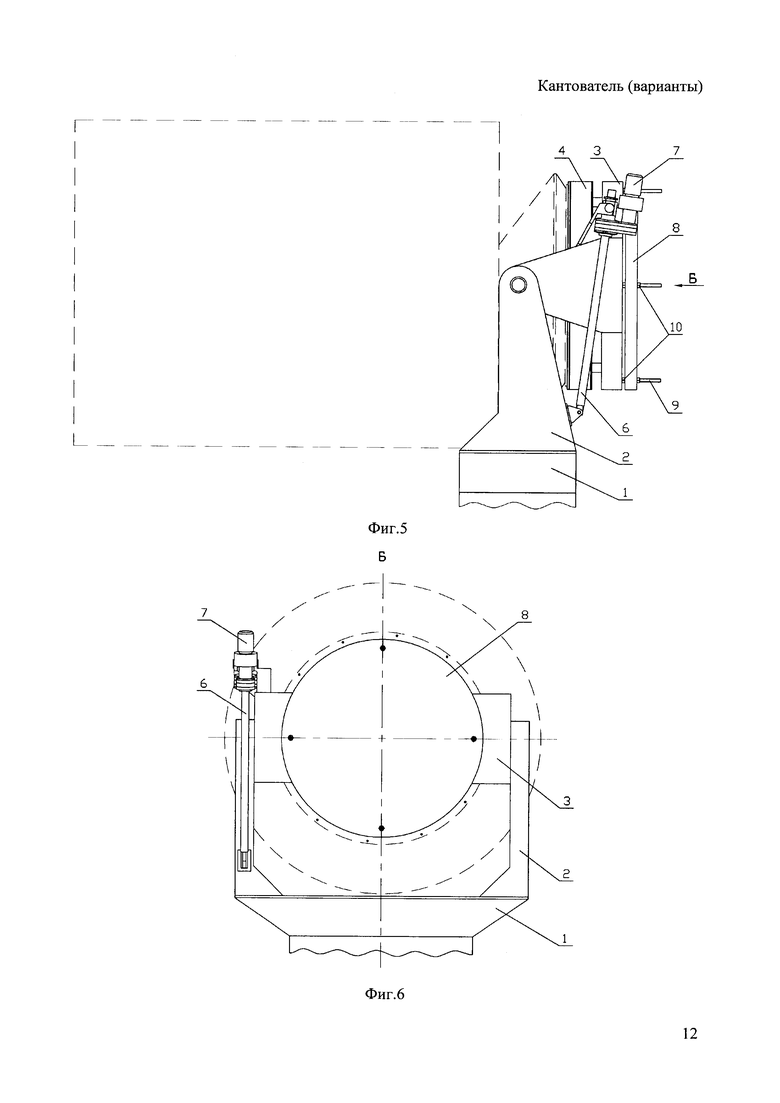
- на фиг. 5 - кантователь с космическим аппаратом в горизонтальном положении (главный вид);
- на фиг. 6 - кантователь с космическим аппаратом в горизонтальном положении (вид сбоку).
По второму варианту кантователь содержит основание 1, две стойки 2, грузовую платформу 3, поворотную планшайбу 4 и механизм кантования 5.
Основание 1 в сборе с двумя стойками 2 является силовым элементом конструкции и может быть выполнено в различном конструктивном исполнении. На стойках 2 на оси кантования закреплена грузовая платформа 3 посредством, например, осей, установленных через предусмотренные отверстия в стойках 2 и грузовой платформе 3, с возможностью ее поворота до 90° относительно оси кантования. Угол поворота грузовой платформы 3 относительно оси кантования до 90° обусловлен конструктивным исполнением кантователя и технологией работ с космическими аппаратами, как на заводе-изготовителе, так и на техническом комплексе космодрома, в связи с чем отсутствует необходимость увеличения угла кантования более чем на 90°. На грузовой платформе 3 смонтирована поворотная планшайба 4, выполненная, например, по форме круга, с возможностью ее поворота на 360° вдоль поверхности, на которой она закреплена, для удобства работы обслуживающего персонала с космическим аппаратом. Поворот грузовой платформы 3 относительно оси кантования осуществляется с помощью механизма кантования 5, состоящего из невращающегося винта 6, шарнирно закрепленного на одной из стоек 2, и электромеханического привода 7, перемещающегося вдоль невращающегося винта 6 при кантовании. Конструктивной особенностью кантователя является то, что электромеханический привод 7 смонтирован на грузовой платформе 3 с возможностью его поворота вместе с грузовой платформой 3 относительно оси кантования, что обеспечивает увеличение момента кантования за счет смещения оси вращения электромеханического привода 7 от оси кантования и, следовательно, возможность использования менее мощного привода кантования. Также посредством размещения электромеханического привода 7 на грузовой платформе 3 оптимизированы габаритные размеры конструкции в целом, что позволяет использовать кантователь данного конструктивного исполнения в условиях ограниченного пространства, например в ж/д вагоне. Для приведения центра масс грузовой платформы 3 с кантуемым космическим аппаратом к оси кантования и, соответственно, минимизации усилия при кантовании и возможности использования привода кантования меньшей мощности в конструкции грузовой платформы 3 со стороны, противоположной креплению поворотной планшайбы 4, предусмотрен балансир 8, выполненный, например, по форме круга. Например, балансир 8 через выполненные в нем отверстия установлен на стержни 9, ввинченные в грузовую платформу 3, и зафиксирован с помощью крепежных деталей, например гаек 10, навинченных на каждый стержень 9 с обеих сторон балансира 8.
Кроме того, в зависимости от требуемой задачи в конструкции кантователя могут быть предусмотрены аутригеры (домкраты) для приведения его в стационарное положение, колеса для его перемещения, такелажные и швартовочные узлы для выполнения такелажно-швартовочных работ и другие узлы.
По первому варианту кантователя в конструкции грузовой платформы балансир 8 со стержнями 9 и гайками 10 не предусмотрен.
Рассмотренный кантователь работает следующим образом.
1 вариант - кантователь находится в исходном положении, например согласно положению на фиг. 1. Затем на поворотной планшайбе 4 кантователя закрепляют космический аппарат в вертикальном положении. После чего, при необходимости, выполняют кантование космического аппарата на 90° (из вертикального в горизонтальное положение) посредством механизма кантования 5 и (или) его поворот на 360° вокруг оси вращения поворотной планшайбы 4 в зависимости от требуемой задачи.
2 вариант - в отличие от первого варианта принцип работы данного устройства следующий. Кантователь находится в исходном положении, например, согласно положению на фиг. 2, причем балансир 8 зафиксирован на стержнях 9 на минимально возможном расстоянии от грузовой платформы 3. Данное положение балансира 8 обеспечивает приведение центра масс грузовой платформы 3 с кантуемым космическим аппаратом, имеющим минимально возможные массу из применяемых для кантования космических аппаратов и минимально возможное расположение центра масс грузовой платформы 3 с кантуемым космическим аппаратом до оси кантования и, соответственно, минимально возможное плечо от центра масс грузовой платформы 3 с кантуемым космическим аппаратом до оси кантования, к оси кантования. Следовательно, положение балансира 8, зафиксированного на стержнях 9, на максимально возможном расстоянии от грузовой платформы 3 обеспечивает приведение центра масс грузовой платформы 3 с кантуемым космическим аппаратом, имеющим максимально возможные массу из применяемых для кантования космических аппаратов и максимально возможное расположение центра масс грузовой платформы 3 с кантуемым космическим аппаратом до оси кантования, к оси кантования. Поэтому в зависимости от кантуемого космического аппарата, а именно в зависимости от его массы и расчетного значения расположения центра масс грузовой платформы 3 с кантуемым космическим аппаратом до оси кантования, выполняют перемещение балансира 8 вдоль стержней 9 на расчетное расстояние, предварительно ослабив гайки 10. Таким образом, для минимизации усилия при кантовании необходимо выполнить условие равнозначности значений между произведением известной массы кантуемого космического аппарата на известное (расчетное) плечо от центра масс грузовой платформы 3 с кантуемым космическим аппаратом до оси кантования и произведением известной массы балансира 8 на известное (расчетное) плечо от центра масс балансира 8 до оси кантования. Окончательное положение балансира 8 на стержнях 9 фиксируют гайками 10. Затем на поворотной планшайбе 4 кантователя закрепляют космический аппарат в горизонтальном положении. После чего, при необходимости, выполняют кантование космического аппарата на 90° (из горизонтального в вертикальное положение) посредством механизма кантования 5 и (или) его поворот на 360° вокруг оси вращения поворотной планшайбы 4 в зависимости от требуемой задачи.
Техническим результатом изобретения является возможность использования для широкого спектра космических аппаратов с различными массогабаритными характеристиками, уменьшение габаритных размеров конструкции в целом, возможность поворота космического аппарата вокруг его продольной оси и уменьшение трудоемкости при работе с кантователем.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОНТЕЙНЕР | 2009 |
|
RU2408515C1 |
| КАНТОВАТЕЛЬ | 2009 |
|
RU2392216C1 |
| ТРАНСПОРТНО-ТЕХНОЛОГИЧЕСКИЙ АГРЕГАТ | 2000 |
|
RU2181327C2 |
| КАНТОВАТЕЛЬ | 1998 |
|
RU2129087C1 |
| Кольцевой кантователь | 1979 |
|
SU837693A1 |
| Кантователь | 1980 |
|
SU912463A2 |
| КАНТОВАТЕЛЬ | 1971 |
|
SU295639A1 |
| Кантователь изделий | 1980 |
|
SU1031892A1 |
| Кантователь | 1985 |
|
SU1273324A1 |
| Кантователь | 1990 |
|
SU1782878A1 |
Изобретение относится к конструкциям, предназначенным для кантования (поворота) изделий различного назначения, предпочтительнее космических аппаратов. Кантователь содержит основание, две стойки, к которым на оси кантования закреплена грузовая платформа, которая снабжена поворотной планшайбой, и механизм кантования. Механизм кантования состоит из не вращающегося винта, шарнирно закрепленного на одной из стоек, и электромеханического привода, перемещающегося вдоль винта при кантовании. Электромеханический привод смонтирован на грузовой платформе с возможностью его поворота вместе с грузовой платформой относительно оси кантования. При этом по первому варианту в конструкции грузовой платформы балансир со стержнями и гайками не предусмотрен. По второму варианту в конструкции грузовой платформы со стороны, противоположной креплению поворотной планшайбы, предусмотрен балансир с возможностью его перемещения вдоль стержней, закрепленных на грузовой платформе. Достигается уменьшение массогабаритных размеров конструкции, возможность поворота космического аппарата вокруг его продольной оси и уменьшение трудоемкости при работе с кантователем. 2 н.п. ф-лы, 6 ил.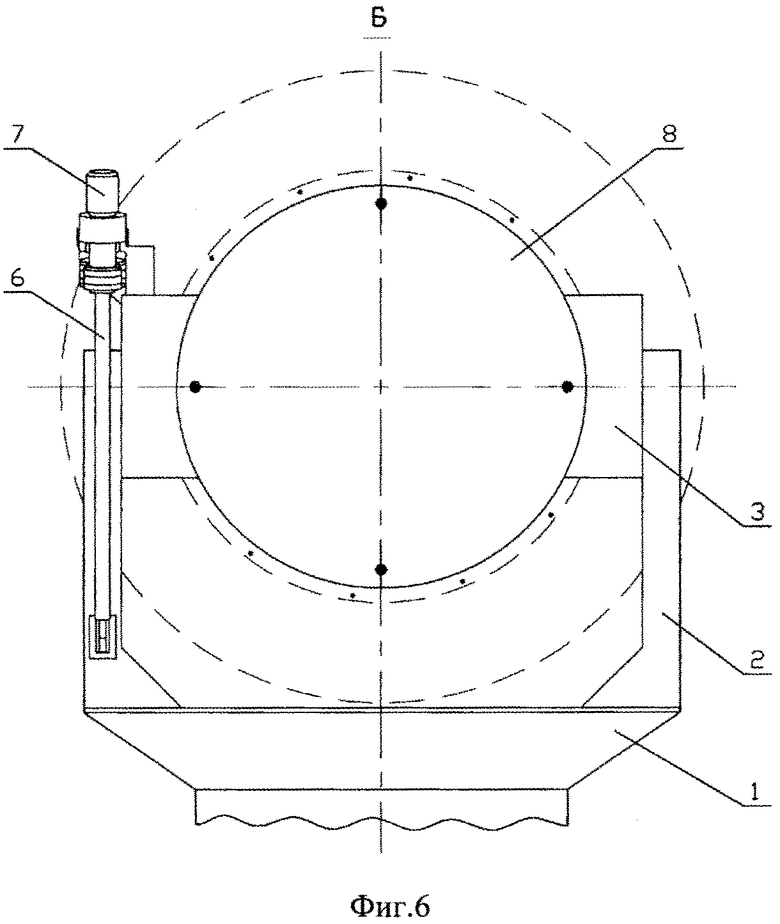
1. Кантователь, содержащий основание, две стойки, к которым на оси кантования закреплена грузовая платформа, снабженная поворотной планшайбой, и механизм кантования, отличающийся тем, что механизм кантования состоит из не вращающегося винта, шарнирно закрепленного на одной из стоек, и электромеханического привода, перемещающегося вдоль винта при кантовании, причем электромеханический привод смонтирован на грузовой платформе с возможностью его поворота вместе с грузовой платформой относительно оси кантования.
2. Кантователь, содержащий основание, две стойки, к которым на оси кантования закреплена грузовая платформа, снабженная поворотной планшайбой, и механизм кантования, отличающийся тем, что механизм кантования состоит из не вращающегося винта, шарнирно закрепленного на одной из стоек, и электромеханического привода, перемещающегося вдоль винта при кантовании, причем электромеханический привод смонтирован на грузовой платформе с возможностью его поворота вместе с грузовой платформой относительно оси кантования; в конструкции грузовой платформы со стороны, противоположной креплению поворотной планшайбы, предусмотрен балансир с возможностью его перемещения вдоль стержней, закрепленных на грузовой платформе.
| Фотомеханический способ изготовления шелкотрафаретных печатных форм на сетчатой основе | 1960 |
|
SU131358A1 |
| КАНТОВАТЕЛЬ | 2001 |
|
RU2206816C2 |
| US 3753505 A, 21.08.1973 | |||
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА УПРАВЛЕНИЯ ПРОДОЛЬНОЙ ПОДАЧЕЙ ТОКАРНОГО СТАНКА | 1971 |
|
SU419847A1 |

