Изобретение относится к грузозахватным устройствам, преимущественно для захвата и отстропкн плаву-. чих грузов.
Известны захватные устройства для грузов, снабженных штоками с грибовидной головкой или монтажными стержнями 1.
Недостатком известного устройства является то, что оно не обеспечивае-т автоматическую отстропку грузов.
Известно также захватное устройство, преимущественно для грузов с грибовидной головкой, содержащее навешиваемое на грузоподъемную машину , шарнирно присоединенные к нему тяги и шарнирно соединенные с последними захватные органы 2.
Недостатком данного устройства является то, что оно не обеспечивает автоматическую отстропку плавучих грузов с водной поверхности.
Цель изобретения - расширение эксплуатационных возможностей путем автоматизации захвата плавучих грузов с водной поверхности.
Цель достигается тем, что устройство снабжено размещенным на коромысле упором, выполненным в виде пластины со скругленным одним концом, имеющей в средней части прорезь, и закрепленной на коромысле и размещенной в прорези пластины осью, при этом верхний конец каждой тяги выполнен с выступом для взаимодействия с пластиной.
10
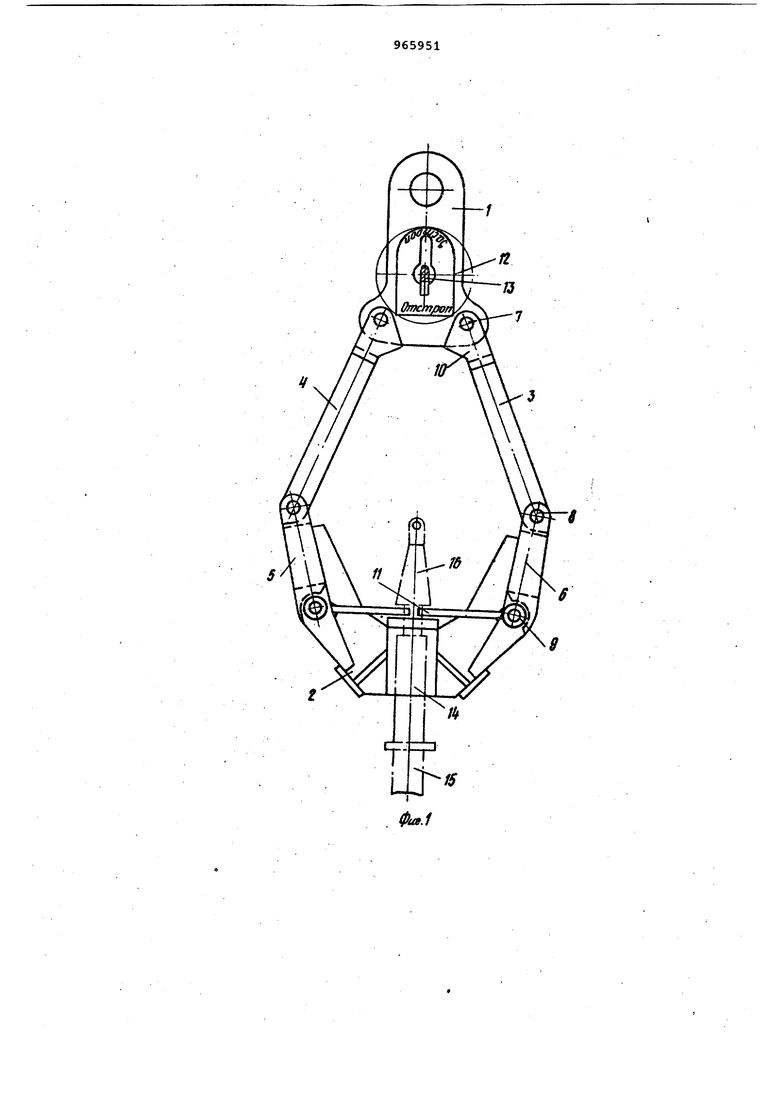
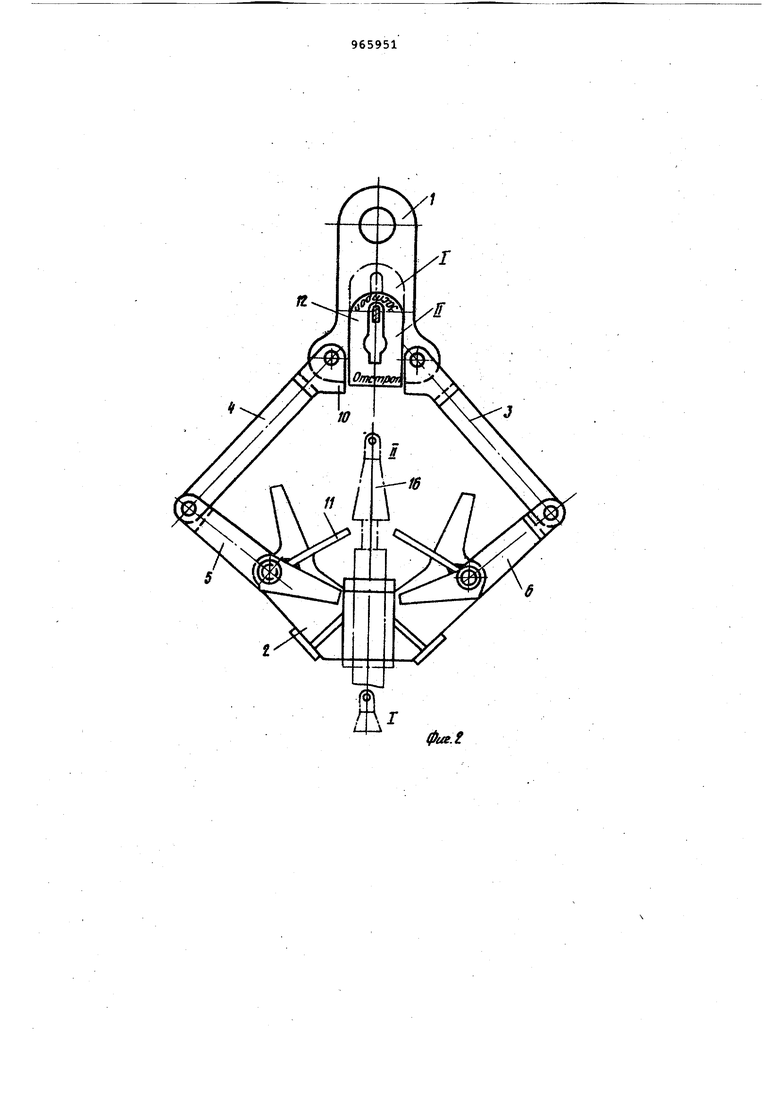
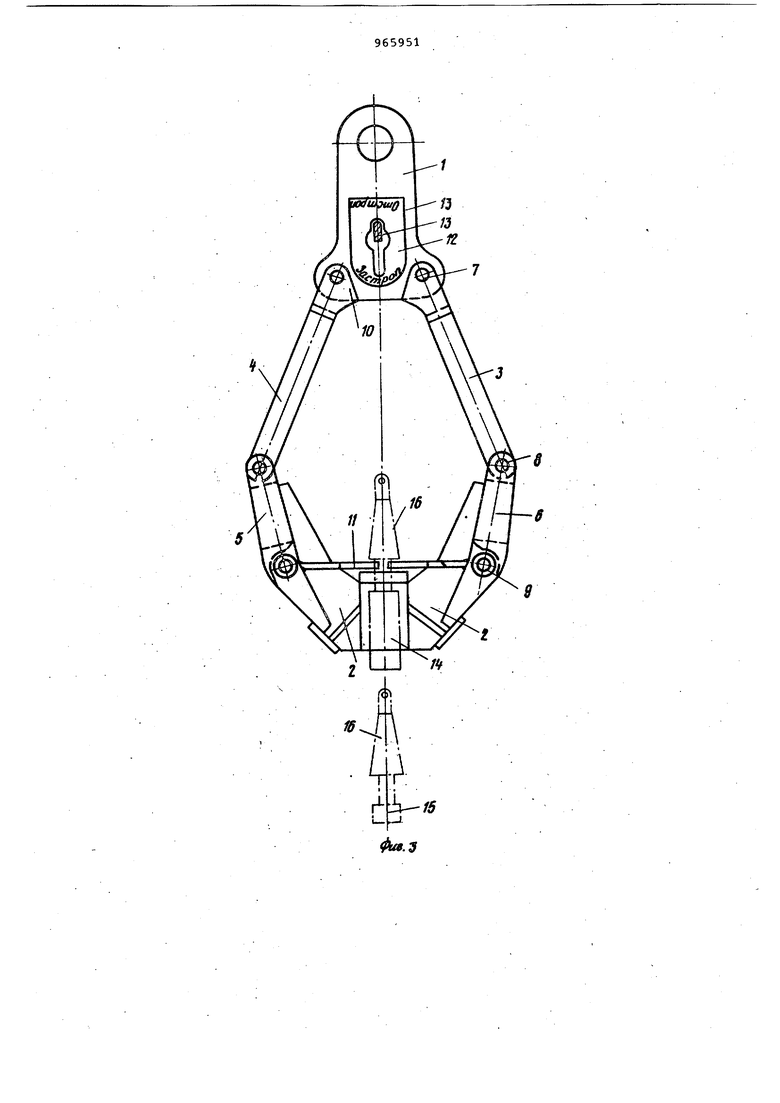
На фиг. 1 изображено устройство в закрытом положении для спуска груза; на фиг. 2 - то же, в открытом положении после посадки груза; на фиг. 3 - тоже, в закрытом положе15нии для подъема груза; на фиг. 4 то же, в открытом положении при подъеме груза; на фиг. 5 - верхние коромысла и упор.
Захватное устройство состоит из
20 верхнего корогвлсла 1 и нижнего 2, соединенных между собой верхними 3 и 4 и нижними тягами 5 и 6. Тяги прикреплены к коромыслс1М и между собой шарнирно с помощью осей 7 8 н 9.
25 Верхние тяги выполнены с выступами 10. На нижних тягах стопорные элементы выполнены в виде упоров 11. На верхнем коромысле подвижно закреплен упор 12 на оси 13, а на ник- , нем смонтирован корпус 14,в кото30
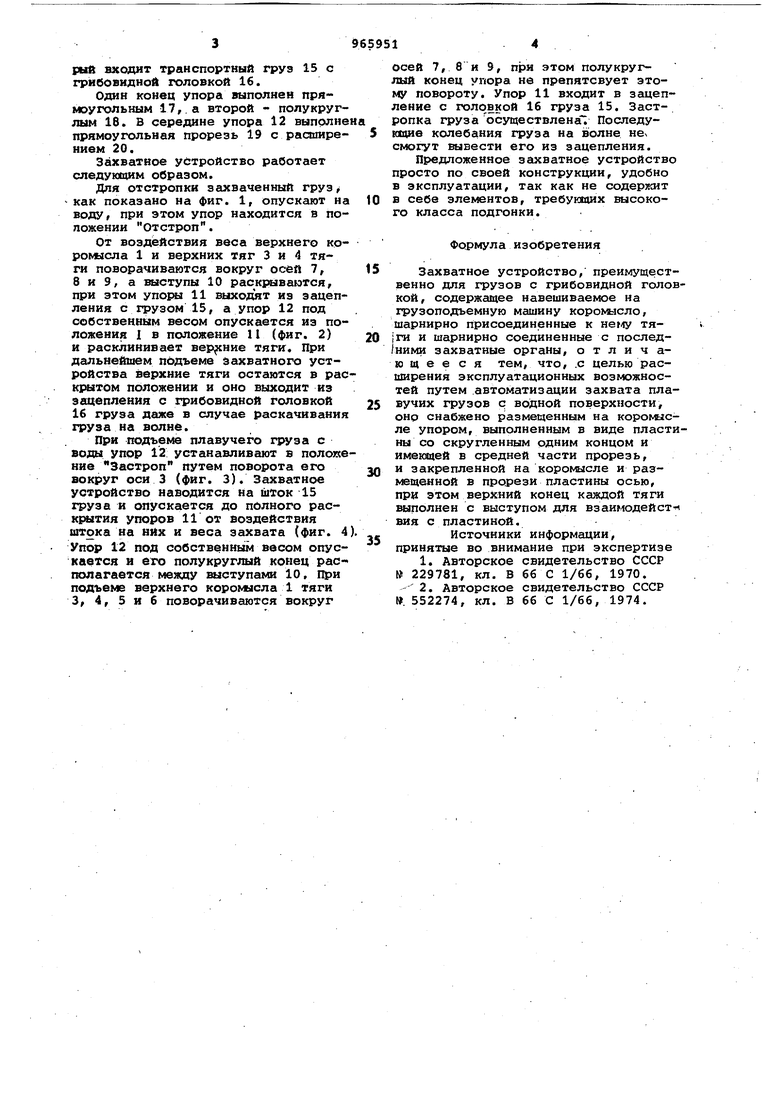
рый входит транспортный груз 15 с грибовидной головкой 16.
Один конец упора выполнен прямоугольным 17,.а второй - полукруглым 18. В середине упора 12 выполнена прямоугольная прорезь 19 с расшнре- 5 нием 20.
Захватное устройство работает следующим образом.
Для отстропки захваченный груз как показано на фиг. 1, опускают на 10 ВОРУ t при этом упор находится в положении Отстроп.
От воздействия веса верхнего коромысла 1 и верхних тяг 3 и 4 тяги поворачиваются вокруг осей 7, 15 8 и 9, а выступы 10 раскраиваются, при этом УПО1ЯЛ 11 выходшт из зацепления с грузом 15, а упор 12 под собственным весом опускается из положения I в положение И (фиг. 2} 20 и расклинивает верхние тяги. При альнейвюм подъеме захватного устройства верхние тяги остаются в раскрытом положении и оно выходит из згщепления с грибовидной головкой 25 16 груза даже в случае раскачивания груза на волне.
При подъеме плавучего груза с воды упор 12 устанавливают в положение Застроп путем поворота его й вокруг оси 3 (фиг. 3). Захватное стройство наводится на шток 15 груза и опускается до полного расксштия упоров 11 от воздействия тока на них и веса захвата (фиг. 4). пор 12 под собственным весом опусается и et4 полукруглый конец расолагается между выступами 10, При одъеме верхнего коромлсла 1 тяги 3, 4, 5 и 6 поворачиваются вокруг
осей 7, 8 и 9, при этом полукруглый конец угюра не препятсвует этому повороту. Упор 11 входит в зсщепление с головкой 16 груза 15. Застропка груза осуществлена Последующие колебания груза на зЬлне неч смогут вывести его из зацепления.
Предложенное захватное устройство просто по своей конструкции, удобно в эксплуатации, так как не содержит в себе элементов, требуиших высокого класса подгонки.
Формула изобретения
Захватное устройство, преимущественно для грузов с грибовидной головкой, содержащее навешиваемое на грузоподъемную машину коромысло, шарнирно присоединенные к Horiy тя|ги и шарнирно соединенные с послед1ними захватные органы, отличающее с я тем, что, .с целью расширения эксплуатационных возможностей путем автоматизации захвата плавучих грузов с водной поверхности, оно снабжено размещенным на коромысле упором, выполненным в виде пластины со скругленным одним концом и имеющей в средней части прорезь, и закрепленной на коромысле и размещенной в прорези пластины осью, при этом верхний конец каждой тяги выполнен с выступом для взаимодейсТ ВИЯ с пластиной.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 229781, кл. В 66 С 1/66, 1970.
2.Авторское свидетельство СССР . 552274, кл. В 66 С 1/66, 1974.
ilr
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузозахватное устройство | 1990 |
|
SU1751139A1 |
| Захватное устройство для грузов с грибовидной головкой | 1975 |
|
SU673589A1 |
| Захват-сбрасыватель для изделий с грибовидной головкой | 1981 |
|
SU992391A1 |
| Захват-раскладчик | 1980 |
|
SU948835A1 |
| Устройство для уплотнения грунта | 1985 |
|
SU1323657A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ ПЕРЕГРУЗКИ ПАКЕТОВ ГРУЗА, ОБВЯЗАННЫХ ЛЕНТОЧНЫМИ СТРОПАМИ | 1972 |
|
SU332017A1 |
| АВТОМАТИЧЕСКИЙ ЗАХВАТ РОДОВИКОВА | 2009 |
|
RU2394747C1 |
| Грузозахватное устройство | 1982 |
|
SU1049410A1 |
| Захват-кантователь для грузовцилиНдРичЕСКОй фОРМы | 1979 |
|
SU850544A2 |
| Грузозахватное устройство | 1986 |
|
SU1418268A1 |