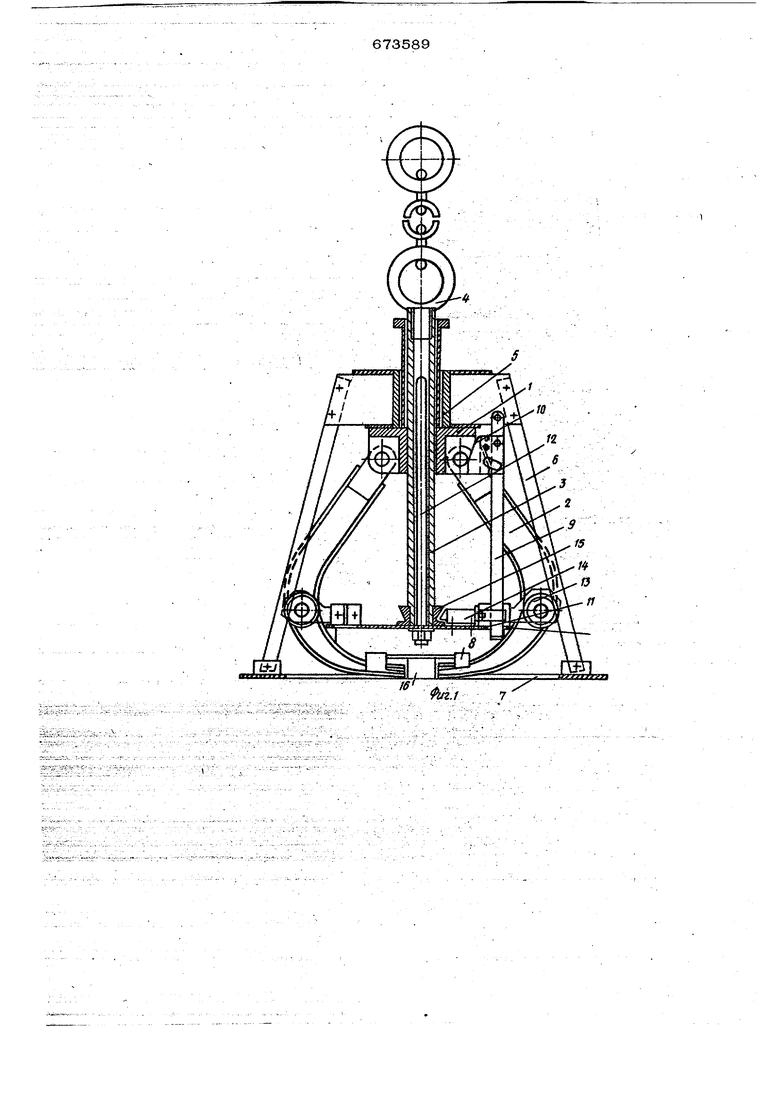
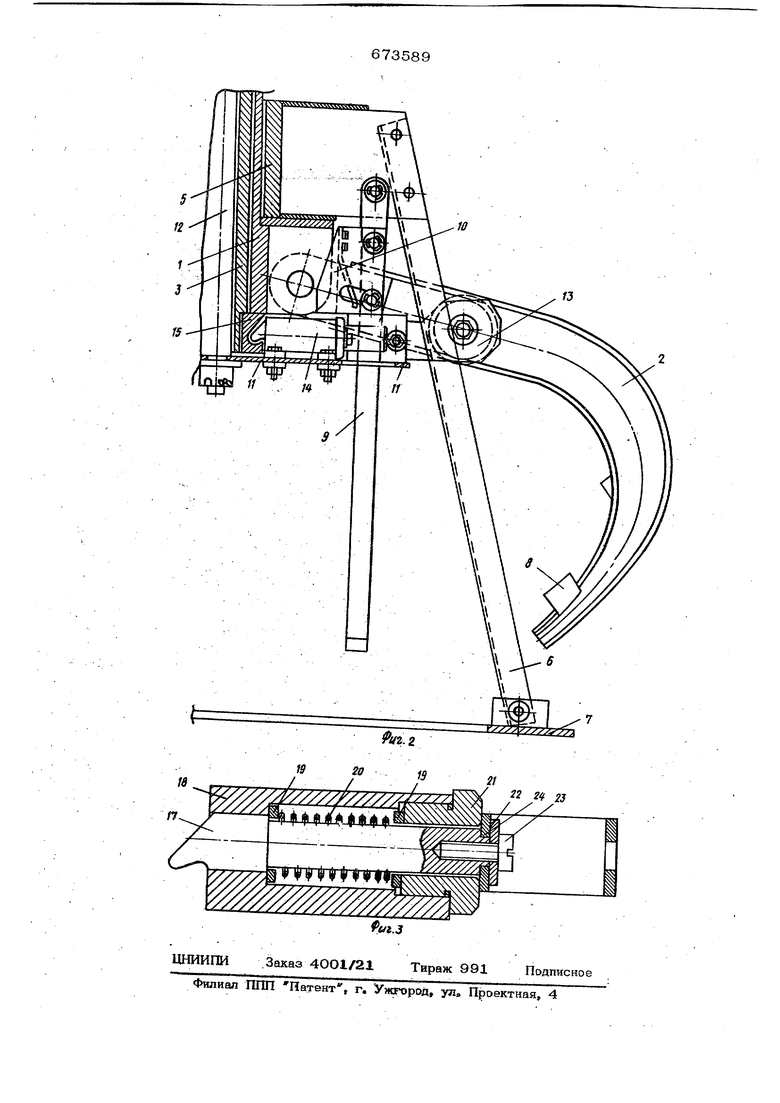
(54) ЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ ГРУЗОВ С ГРИБОВИДНОЙ ГОЛОВКОЙ устройство открыто , на фиг. 3 - разре пружинного фиксатора. Захватное устройство содержит подви ный корпус 1 с шарнирно соединенньгми ним захватными рычагами 2, имеющими пааы для перемещения роликов, несущий полый стержень 3 с серьгой 4 для навески на крюк крана, опорную раму, сос тоящую КЗ втулки 5, жестких тяг 6 и опорно-улавливающего кольца 7, уловите 8, расположенные на захватных рычагах 2, тягу 9, шарнирно установленную на раме с подпружиненным кулачком ip,. подвижную горизонтально расположенную пластину 11с жестко установленны ми на ней центральным щтоком 12, роликами 13 и пружинным фиксатором 14, причем на нижнем конце несущего полого стержня закреплен фигурный фланец 15. Захватывание осуществляется за грибовидную головку 16 груза. Захватные рычаги 2 при размыкании проходят между жесткими тягами 6. На фиг. 1 и 2 плоскость крюков усло но совмещена с плоскостью жестких тяг На фиг. 3 изображен разрез пружинного фиксатора 14. Шток 17 с фигурным зубом имеет возможность продольного перемещения в корпусе 18, С помощью щайб 19 и пружины 2О осуществ ляется возвратное движение штока в направлении к фигурному фланцу. Штуцер 2 является упором для пружины 2О через щайбу 19. К щтоку при помощи щайбы 22 и винта 23 крепится хомутик 24. Устройство навешивается своей серьгой на крюк крана в закрытом положении При подъеме крюка поднимаются несущий полый стержень 3 и горизонтально расположенная пластина 11, с жестко установленными на ней роликами 13, центральным щтоком 12 и пружинным фиксатором 14 с хомутом 24 и фигурным зубом щтока 17. Ролики 13, взаимодействующие с пазами захватных рычагов 3, размыкают их за счет того, что расстояние между осями вращения захватных рычагов меньще, ч&м расстояние между осями /роликов и за счет веса кор пуса 1, который давит на захватные рычаги 2, помогая их раскрытию. При подъеме пластины 11 корпус 1 опускается, а захватные рычаги 2 размыкаются до полного их раскрытия и до момента упора фигурного фланца-15 в корпус 1. В этот момент пружина кулач,ка 1О тяги 9 сжата за счет того, что (фланец корпуса 1, скользя по срезу ку-. |лачка 10, прижимает его к тяге 9, ко-торая стремится вытянуть щток 17 пружинного фиксатора из зацепления с фи- гурным фпанц м 15. Поскольку шток 17 пружинного фиксатора находится под действием веса пластины 11 и корпуса 1, пружина кулачка 10 тяги 9 не может преодолеть сопротивление . сил трений между фигурным зубом пружинного фиксатора 14 и фигурным фланцем 15. При дальнейшем подъеме несущего стержня 3 его фигурный фланец 15 поднимет пластину 11с центральным штоком 12 и роликами 13, а , также корпус 1 захватные рычаги 2 и опорную раму. Захватное устройство поднято и готово к захватыванию груза. Для захватывания груза необходимо поставить захватное устройство на верхнюю поверхность груза таким образом, чтобы грибовидная головка 16 груза находилась внутри кольца 7 опорной рамы. При этом кольцо 7 помогает уловить грибовидную головку 16, погасить раскачивание устройства и определить правильность его установки. Устройство установлено правильно, еспи грибовидная головка 16 груза находится внутри кольца 7 опорной рамы. Устанавййваемое на груз захватное устройство касаётсй его сначала опорной рамой, а затем зах;ватными рычагами 2. При установке на поверхность груза опорной рамы в месте с ней прекращает движение вниз и тяга 9 с подпружиненным кулачком 10. Корпус 1 устройства, продолжающий опускаться вместе с несушим полым стержнем 3, захватными рычагами 2 и пластиной 11 .с центральным штоком 12, роликами 13 и пружинным фиксатором 14 отжимает своим фланцем кудачок 10. В момент, когда захватные рычаги 2 опустятся на поверхность груза (кольцо 7 опорной рамы), вес корпуса 1 захватных рычагов пластин 11 и несущего стержня 3 будет передаваться через захватные рычаги 2 на кольцо 7 опорной рамы, Несущий стержень 3 опустится на плас тину 11 и весовая нагрузка фигурного зуба 17 пружинного фиксатора 14 снимается и не будет мешать выходу зуба из зацепления с фланцем 15. Пружина кулачка 10 тяги 9 преодолеет усилие пружины 20 фиксатора 14 и выведет его шток 17 из заце,Ш1ения с фигурным фланцем 15 посредством тяги 9 и хомутика 24. Захватное устройство установлено на груз. Для захвата груза кран поднимает несущий стержень 3, который поднимается вместе с корпусом 1 захватного устройства и захватными рычагами 2. Поднимаясь вместе с корпусом 1 захватные рычаги 2 скользят на поверхности грузи и зацепляют грибовидную головку 16 уло вителями 8. Пластина 11 освобожденная от фигурного фланца 15 под действием собственного веса, опускается и сжимает своими роликами 13 захватные рычаги 2 устройства, помогая им замкнуться,Опустившись до упоров на рычагах 2, пластина 11 фиксирует их в замкнутом положении. При замыкании захватных рычагов 2 захватное устройство центруется относительно грибовидной головки 16 груза, перемещаясь по поверхности груза Перемещение устройства по поверхности груза становится возможным за Счет того, что основной вес устройства пёредает ся на крюк крана через несущий стержень
3, а трение между поверхностью груза и устройством становится незначительным
Огцентровавшись относительно головки 16 груза, устройство захватывает ее и может перенести в любой район зоны действия крана. Самопроизвольное размыкание захватных рычагов 2 устройства в воздухе невозможно, так как рычаги зафиксированы в замкнутом положении роликами 13 пластины 11, взаимодействующими с пазами рычагов 2.
Груз может быть установлен на складскую площадь в несколько ярусов или на транспортное средство. Г1рибовидная 14 ловка 16 не мешает многоярусному штабелированию за счет имеющихся ножек изделий, предохраняющих груз от подмочки. После установки груза несугоризонтальной пластиной, закрепленной на конце штока, на которой установленьгролики и подпружиненный фиксатор, содержащий koMyT и фигурный зуб, причем на опорной раме шарнирно закреплена тяга с подпружиненным кулачком, взаимодействуюшая с хомутом фиксатора, при этом на конце петого стержня закреплен фигурный фланец, взаимодействующий с зубом фиксатора, а на захватных рычага с выполнены пазы для перемещения роликов,
Источни1сн информации, принятые во внимание tspa экспертизе
1.Вайнсон А. А. и др, Сигнализированные крановые грузозахваты для Штучных грузов , М., 1972, с. 35. рис. 13.
2.Патент Франции № 1306106, кл. В 66 С, 1962. ший стержень опускается до пластины 1 1. Фигурный фланец 15 отжимает шток 17 ружинного фиксатора 14 и проходит его, а пружина 0 фиксатора возвращает шток 27 в исходное положение. Захватное устройство может найти применение при переработке кранами специальных контейнеров и тарно-щтучных грузов, снабженных грибовидными гьловками. Формула изобретения , Захватное устройство для грузов с Грибовидной головкой, содержащее oiiop аую раму, подвижный корпус с шарнирно закрепленными на нем захватными рычагами, и полый стержень с серьгой для навешивания на крюк крана, проходящий через центральные отверстия в корпусе и опорной раме, отличающееся тем, что, с; целью обеспечения автоматического захвата и освобождения груза, оно снабжено центральными штоком расположенным внутри полого стержня, и
15
П d
П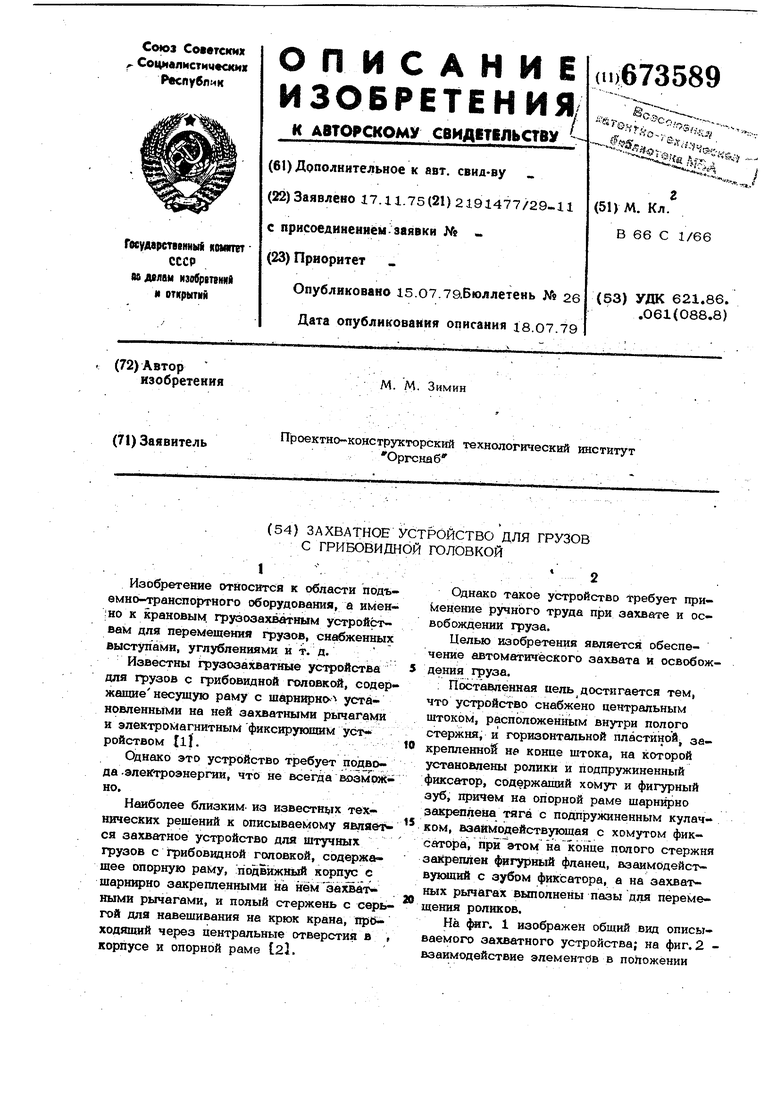
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство для грузовС цЕНТРАльНыМ ОТВЕРСТиЕМ | 1978 |
|
SU810598A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ ГРУЗОВ | 1993 |
|
RU2072958C1 |
| Автоматическая каретка подвесной канатной установки | 1973 |
|
SU495223A1 |
| Грузозахватное устройство | 1977 |
|
SU643417A1 |
| Захватное устройство для грузов с фигурной головкой | 1976 |
|
SU734128A1 |
| Захватное устройство для грузов с внутренней полостью | 1977 |
|
SU740682A1 |
| Автоматическое вакуумное захватное устройство | 1976 |
|
SU616219A1 |
| Грузозахватное устройство | 1986 |
|
SU1393760A2 |
| Устройство для формования изделий "мюзле | 1977 |
|
SU751485A1 |
| Автоматический захват | 1960 |
|
SU138721A1 |