Изобретение относится к подъемно- транспортному оборудованию, в частности к механическим грузозахватам преимущественно для рулонов бумаги.
Известно устройство, предназначенное для перегрузки бумаги в рулонах, содержащее два клещевых захвата, соединенных между собой полиспастным механизмом.
Недостатками указанного устройства являются:
большая трудоемкость ручной установки в рабочее положение и снятие его при освобождении устройства от груза;
устройство способно брать только один рулон бумаги.
Известно устройтво - автоматический клещевой захват, содержащий зажимные рычаги и фиксирующий механизм для удержания рычагов в открытом положении, зажимные рычаги установлены поворотно на общей оси и снабжены упорами, воздействующими на последние при подъеме захвата.
Недостатком автоматического клещевого захвата является ненадежность установки захватных органов в открытое положение, т.е. в процессе работы упор фиксирующего механизма имеет возможность не попасть во впадины, находящиеся на упорной планке, в результате чего захватные органы не фиксируются в открытом положении и цикл установки приходится повторять.
Известна подвеска для перегрузки рулонов бумаги, состоящая из рамы, двух рычагов, защелки, подъемных и охватывающих стропов (прототип).
При установке подвески на груз рычаги находятся в нижнем положении В открытом положении рабочему необходимо установить защелку в открытое положение. При подъеме грузовых стропов груз захватывается подъемными стропами и рычаги находятся в крайнем верхнем положении. При установке груза на пол рычаги опускаются в нижнее положение, взаимодействуют с защелкой и происходит отстроповкз подвески от груза.
К недостаткам прототипа следует птне- сти:
(Л
С
ч сл
со ю
ручную застропку груза, ненадежность работы защелки; трудоемкость установки подвески в рабочее (исходное) положение.
Цель изобретения - повышение удобств эксплуатации за счет автоматической за- стропки и отстропки грузов.
Цель достигается тем, что грузозахватное устройство содержит раму с поперечиной и направляющими, стропы и гибкие подхваты с блоками и огибающие блоки тросы, навешиваемые на грузоподъемный механизм, шарнирно соединенные между собой рычаги со связями, первые плечи рычагов расположены в направляющих, а вторые плечи присоединены стропом к грузоподъемному механизму, четырехпро- фильный кулачок, расположенный на одном из первых плеч рычагов и взаимодействующий с упором и с шарнирно соединенным с поперечиной коромыслом, при этом поперечина имеет фигурную прорезь.
При сравнении заявленного грузозахватного устройства с другими техническими решениями был выявлен аналог, в котором используются поворотные заклинивающие кулачки, установленные на концах горизонтальной траверсы, взаимодействующие с зажимными лапами и связанные цепными передачами с двумя находящимися в постоянном зацеплении шестернями, установленными на траверсе, причем одна шестерня снабжена поворотной рукояткой с вырезом, взаимодействующим с фиксатором, установленным на одной из зажимных лап.
Поворотные заклинивающие кулачки в этом грузозахвате выполняются однопрофильными и служат для фиксации рычажной системы при подъеме груза. При опускании груза и высвобождении его поворотные заклинивающие кулачки работают вхолостую, не воздействуя на рычажную систему.
Применение кулачков такой конструкции не позволяет обеспечить работы в автоматическом режиме.
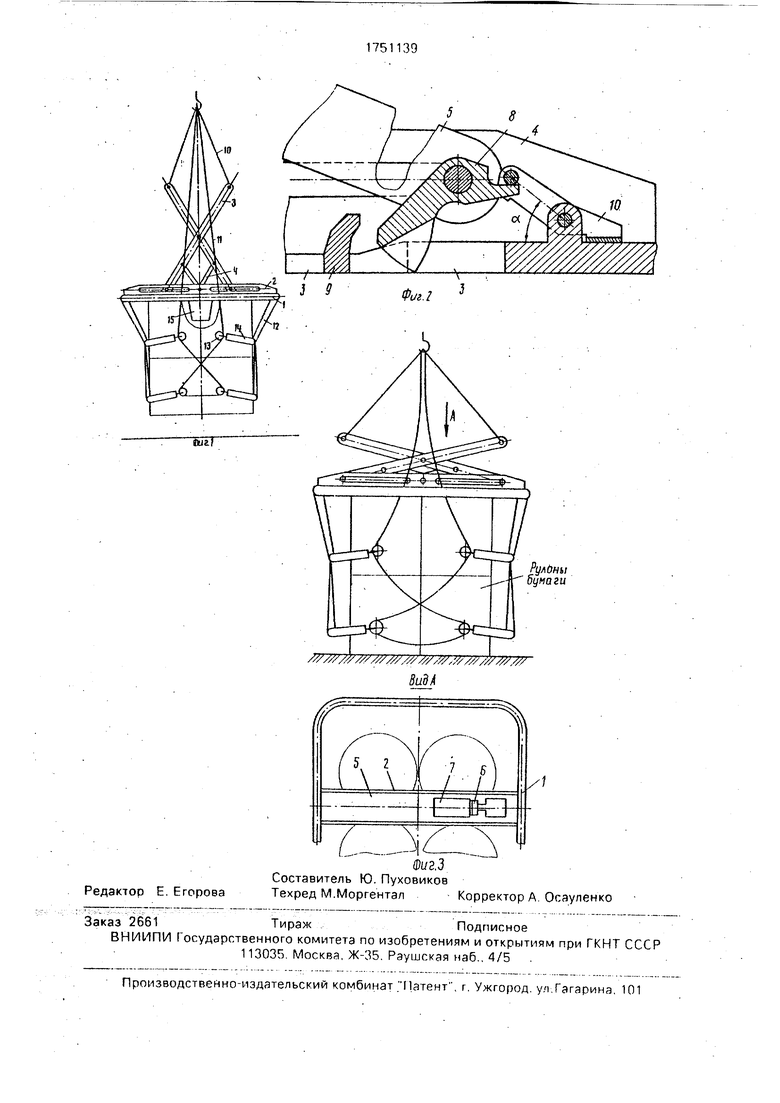
На фиг.1 показано грузозахватное устройств с грузом, общий вид: на фиг.2 - грузозахватное устройство, общий вид: на фиг.З - четырехпрофилъный кулачок.
Грузозахватное устройство преимущественно для рулонов бумаги (фиг.1 и 2) содержит раму 1, в средней части которой крепится поперечина 2 с фигурной прорезью 3 и направляющими 4, в которых перемещаются первые плечи рычагов 5 Рычаги 5 шарнирно соединены между собой в средней части. Связи 6 шарнирно связаны с первыми плечами рычагов 5 и рамой 1. Вторые плечи рычагов 5 присоединены к
стропам 7, навешиваемым на грузоподъемный механизм. На первом плече одного из рычагов 5 шарнирно крепится кулачок 8, который взаимодействует с уп ором 9, закрепленным в фигурной прорези 3 (фиг.З) и коромыслом 10, шарнирно закрепленным на поперечине 2. Кулачок 8 имеет четыре необходимых поверхности: хвостовик, опорную поверхность, профилированную
0 поверхность и тыловую поверхность.
Толщина профилированной поверхности уже, чем толщина самого кулачка. Поперечина 2 имеет фигурную прорезь 3, состоящую из левого отверстия, правого от5 верстия и щели между ними, и шарнирно прикрепленное к ней коромысла 10. Упор 9 располагается между левым отверстием и щелью фигурной прорези 3. Щель фигурной прорези 3 имеет такую ширину, чтобы при
0 падении кулачка 8 с упора 9 его профилро- ванная поверхность могла пройти в нее, а опорная поверхность кулачка опустилась на поперечину 2.
Левое и правое отверстия фигурной
5 прорези 3 по ширине позволяют пройти в них всему кулачку. Коромысло 10 имеет возможность проворачиваться и может находиться в двух положениях. В одном положении коромысло 10 под собственным
0 весом лежит на поперечине 2, а в другом положении коромысло 10, повернувшись при взаимодействии с кулачком 8, упирается своей хвостовой частью в поперечину 2 (фиг.2).
5 К раме 1 подвешены гибкие подхваты 11 с блоками 12 на концах. Трос 13 огибает блоки 12, проходит через отверстия в раме 1 (фиг.З) и своими концами навешивается на грузовой подъемник. Направляющий упор
0 14 жестко крепится в центре поперечины 2, как показано на фиг.1.
Автоматический режим работы грузозахватного устройства обеспечивается следующим образом (см. фиг. 1, 2 , 3). При
5 перемещении рычагов 5 вдоль направляющих кулачок 8 движется совместно с первым плечом одного из рычагов 5, опираясь на поперечину 2, В исходном положении грузозахватного устройства (при нацеливании и
0 установке) рычаги 5 находятся в среднем фиксированном положении. При этом четы- рехпрофмльный кулачок 8 упирается в упор 9. Тросы 13 ослаблены, гибкие подхваты 11 находятся в разведенном положении. При
5 этом коромыслом 10 под собственным весом лежит на поперечине 2. При установке рамы 1 на поверхность груза и дальнейшем опускании грузозахватного механизма первые плечи рычагов 5 смещаются к краям рамы 1. Направляющий упор 14 служит для
ориентации грузозахватного устройства при опускании на груз. Кулачок 8, шарнирно соединенный с первым плечом рычага 5, выходит из зацепления с упором 9, падает в правое отверстие фигурной Прорези 3. В этом случае кулачок 8 не взаимодействует с коромыслом 10, лежащим на поперечине 2. Рычаги 5 занимают нижнее положение. Грузозахватное устройство готово к захвату груза.
При подъеме грузоподъемного механизма первые плечи рычагов 5 перемещаются в направляющих 4 к центру рамы 1. Кулачок 8 выходит из правого отверстия фигурной прорези 3, перекатывается своей тыловой поверхностью по упору 9 и падает в левое отверстие фигурной прорези 3. При этом тросы 13, навешиваемые на грузоподъемный механизм и запасованные в блоки 12, затягивают гибкие подхваты 11 вокруг гру- за.
После опускания грузозахватного устройства с грузом на пол и дальнейшем опускании грузоподъемного механизма первые плечи рычагов 5 смещаются к краям рамы 1. Кулачок 8 выходит из левого отверстия фигурной прорези 3, перекатывается своей профилированной поверхностью по упору 9. При этом он входит в зацепление своей хвостовой частью с коромыслом 10. При дальнейшем перемещении кулачка 8 к краю рамы 1 он соскакивает с упора, его профилированная поверхность попадает в щель фигурной прорези 3, его опорная поверхность падает на поперечину 2, а своей хво- стовой частью он поворачивает коромысло 10 до упора с поперечиной 2.
Дальнейшее перемещение первых плеч рычагов 5 к краю рамы 1 и падение кулачка 8 в правое отверстие фигурной прорези 3 невозможно. Тросы 12 ослаблены, гибкие подхваты 11 разведены. Грузозахватное ус- трйоство готово к освобождению от груза. При подъеме грузоподъемного механизма
первые плечи рычагов смещаются к центру кулачок 8, смещаясь опорной поверхностью по поперечине 2 (фиг.2). входит в ззцепле ние с упором 3 При этом коромысло 10 падает под собственным весом на попере чину 2 с хвостовика кулачка 8. Дальнейшее поступательное перемещение рычагов 5 к центру рамы невозможно. Тросы 13 ослаблены, гибкие подхваты 11 разведены При дальнейшем подъеме грузоподъемного механизма грузозахват снимается с груза и переносится на следующий груз
Использование предлагаемого грузо- захвата позволит производить автоматическую застропку и отстропку грузов цилиндрической формы (например, рулонов бумаги), в результате чего повышается удобства в эксплуатации.
Формула изобретения Грузозахватное устройство, преимущественно для. рулонов бумаги, содержащее раму с поперечиной, связанные одними плечами с рамой и шарнирно соединенные между собой рычаги, присоединенные к вторым плевам рычагов стропы, навешиваемые на грузоподъемный механизм, соединенные с рамой гибкие подхваты для груза, размещенные на подхватах блоки и огибающие блоки тросы, навешиваемые концами на грузоподъемный механизм, отличающееся тем, что, с целью повышения удобства в эксплуатации, оно снабжено закрепленными на выполненной с фигурной прорезью поперечине направляющими, в которых расположено первЬе плечо рычага, и упором, размещенным в фигурной прорези, а связь первых плеч рычагов с рамой включает в себя четырехпрофильный кулачок расположенный на одном из рычагов с возможностью взаимодействия с упором, и шарнирно закрепленное на поперечине рамы с возможностью взаимодействия с кулачком коромысло.
РулОны бумаги
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузозахватное устройство | 1980 |
|
SU931656A1 |
| Грузозахватное устройство | 1983 |
|
SU1164191A1 |
| Грузозахватное устройство | 1990 |
|
SU1729991A1 |
| Грузозахватное устройство | 1977 |
|
SU783179A1 |
| Грузозахватное устройство | 1983 |
|
SU1122603A1 |
| Грузозахватное устройство | 1990 |
|
SU1736904A1 |
| Крановый полуавтоматический захват | 1990 |
|
SU1785991A1 |
| Грузозахватное устройство | 1989 |
|
SU1712301A1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО ВИЛОЧНОГО ПОГРУЗЧИКА | 1991 |
|
RU2011636C1 |
| Захватное устройство для штучных грузов | 1989 |
|
SU1765096A1 |
Использование: предназначено для перегрузки рулонов бумаги и других грузов. Сущность изобретения: грузозахват представляет собой металлическую конструк цию. состоящую из рамы 1 с направляющими 2 для перемещения в них рычагов 3. Нижний конец одного из рычагов оснащен фиксирующим механизмом 4. обеспечивающим автоматическую застроп- ку и отстропку груза. Грузозахват подвешивается на грузозахватный механизм с помощью стропов. Захват груза производится с помощью гибких подхватов и троса, запасованного в блоки. Ориентация грузо- захвата относительно груза осуществляется с помощью направляющего упора. 3 ил
//rJ ////// //////////// ///////// /// ////// Вид
f
S
1 6 1/
и
| КРАНОВЫЙ ЗАХВАТ ДЛЯ ГРУЗОВ | 0 |
|
SU309896A1 |
| кл | |||
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| Устройство станционной централизации и блокировочной сигнализации | 1915 |
|
SU1971A1 |
| АВТОМАТИЧЕСКИЙ КЛЕЩЕВОЙ ЗАХВАТ | 0 |
|
SU332020A1 |
| кл | |||
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| Контрольный висячий замок в разъемном футляре | 1922 |
|
SU1972A1 |
| Каталог фирмы Auramo OY, Финляндия, 1989 | |||
