(54) РЕГУЛЯТОР ГИДРАВЛИЧЕСКОЙ СИСТЕМЫ УПРАВЛЕНИЯ НАВЕСНЫМИ ОРУДИЯМИ ТРАКТОРА
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРОРАСПРЕДЕЛИТЕЛЬ РЕГУЛЯТОРА ПОЗИЦИОННО- | 1972 |
|
SU352615A1 |
| Устройство для управления золотниковым распределителем | 1975 |
|
SU563133A1 |
| ПЕРЕКЛЮЧАТЕЛЬ РЕГУЛЯТОРА ПОЗИЦИОННО-СИЛОВОГО ТИПА | 1972 |
|
SU353664A1 |
| Гидравлический регулятор механизма навески трактора | 1974 |
|
SU494137A1 |
| Регулятор гидравлической системы управления навесными орудиями трактора | 1978 |
|
SU664590A1 |
| Стенд для исследования навесных гидравлических систем | 1990 |
|
SU1765550A1 |
| ГИДРАВЛИЧЕСКИЙ РЕГУЛЯТОР | 1972 |
|
SU357901A1 |
| Стенд для исследования навесных гидравлических систем | 1979 |
|
SU781411A2 |
| Регулятор гидросистемы управления сельскохозяйственными орудиями | 1990 |
|
SU1764533A1 |
| ПЕРЕКЛЮЧАТЕЛЬ РЕЖИМОВ РЕГУЛИРОВАНИЯ ДЛЯ РЕГУЛЯТОРА ПОЗИЦИОННО-СИЛОВОГОТИПА | 1971 |
|
SU420264A1 |
1
Изобретение относится к сельскохозяйственному машиностроению, а именно к регуляторам гидравлических систем управления навесными орудиями трактора.
Известен регулятор гидравлической системы, в котором кинематическая связь исполнительного механизма с золотником регулятора выполнена в .виде зубчато-реечной передачи 1.
Недостатками указанного устройства являются повышенное сопротивление перемеш,ению гайки, взаимодействующей с золотником, и наличие люфтов в зубчатом зацеплении.
Наиболее близким к изобретению по технической сущности является регулятор гидравлической системы управления навесными орудиями трактора, включающий корпус, подпружиненный золотник, взаимодействующий с гайкой, кинематически связанной с корпусом и валиком, соединенным с датчиком управления 2.
Недостатком этого устройства является наличие повышенного трения в сопряжениях винт-гайка и фиксатор ось, что приводит к запаздыванию реакции органов управления навесным орудием. При изменении направления движения рычага обратной связи повыщенное трение обуславливает неоднозначность управляющего усилия (гистерезис) в зависимости от направления движения следящего золотника, что является причиной возникновения незатухающих колебаний.
Пель изобретения - улучщение качества регулирования путем уменьшения гистерезиса регулятора.
Эта цель достигается тем, что кинематические связи выполнены в виде шариков,
10 размещенных во впадинах винтовых нарезок и продольных пазах, при этом винтовые нарезки выполнены на соответствующи с поверхностях валика и гайки, а продольные пазы - на наружной поверхности гайки и внутренней поверхности корпуса.
15
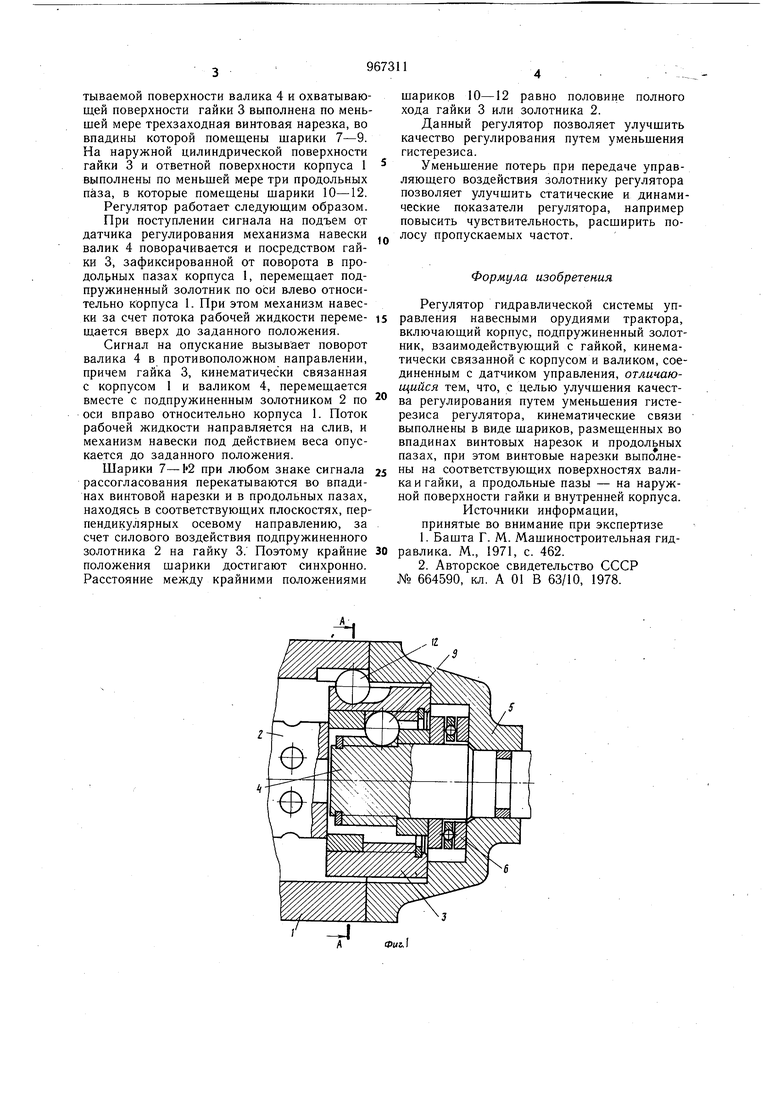
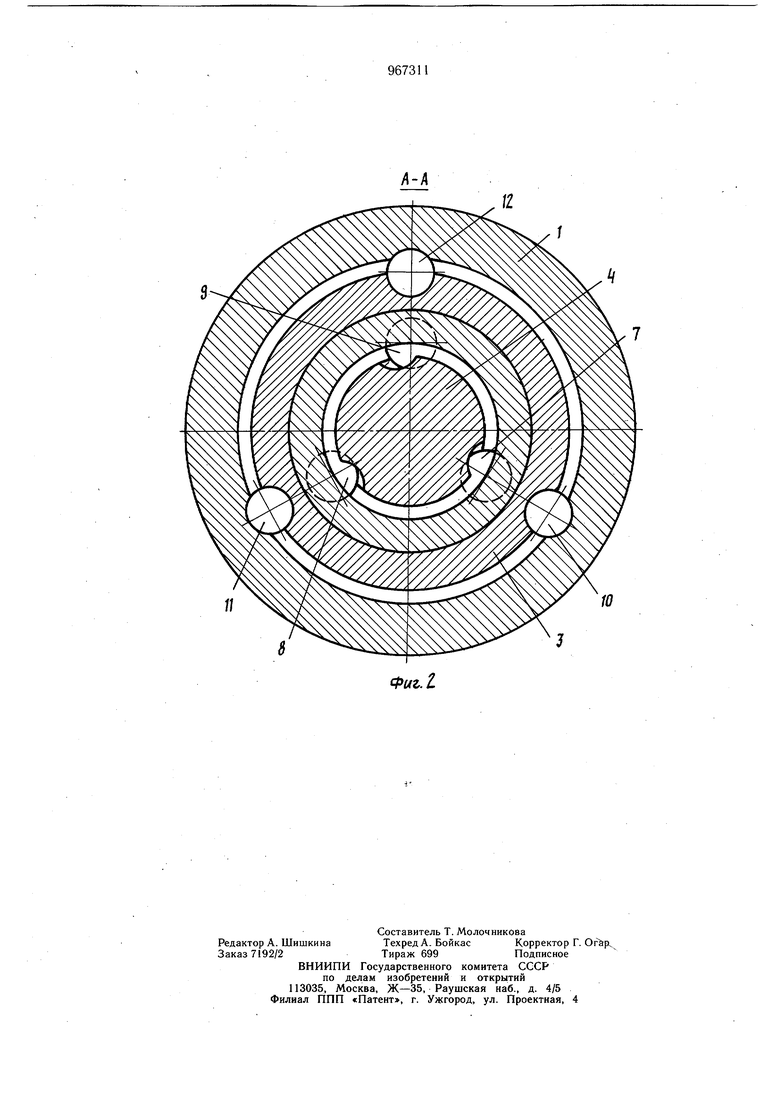
На фиг. 1 изображен предлагаемый регулятор; на фиг. 2 - разрез А-А на фиг. I.
В корпусе 1 регулятора размещен подпружиненный золотник 2, взаимодействующий с гайкой 3, которая кинематически связана с корпусом 1 и валиком 4. Датчик регулирования механизма навески (не показан) кинематически связан с валиком 4, установленным в крыщке 5 с возможностью поворота на упорном подщипнике 6. На охватываемой поверхности валика 4 и охватывающей поверхности гайки 3 выполнена по меньшей мере трехзаходная винтовая нарезка, во впадины которой помещены шарики 7-9. На наружной цилиндрической поверхности гайки 3 и ответной поверхности корпуса 1 выполнены по меньшей мере три продольных паза, в которые помещены шарики 10-12. Регулятор работает следующим образом. При поступлении сигнала на подъем от датчика регулирования механизма навески валик 4 поворачивается и посредством гайки 3, зафиксированной от поворота в продол{)Ных пазах корпуса 1, перемещает подпружиненный золотник по оси влево относительно корпуса 1. При этом механизм навески за счет потока рабочей жидкости перемещается вверх до заданного положения. Сигнал на опускание вызывает поворот валика 4 в противоположном направлении, причем гайка 3, кинематически связанная с корпусом 1 и валиком 4, перемещается вместе с подпружиненным золотником 2 по оси вправо относительно корпуса 1. Поток рабочей жидкости направляется на слив, и механизм навески под действием веса опускается до заданного положения. Шарики 7-12 при любом знаке сигнала рассогласования перекатываются во впадинах винтовой нарезки и в продольных пазах, находясь в соответствующих плоскостях, перпендикулярных осевому направлению, за счет силового воздействия подпружиненного золотника 2 на гайку 3. Поэтому крайние положения щарики достигают синхронно. Расстояние между крайними положениями шариков 10-12 равно половине полного хода гайки 3 или золотника 2. Данный регулятор позволяет улучшить качество регулирования путем уменьшения гистерезиса. Уменьшение потерь при передаче управляющего воздействия золотнику регулятора позволяет улучшить статические и динамические показатели регулятора, например повысить чувствительность, расширить полосу пропускаемых частот. Формула изобретения Регулятор гидравлической системы управления навесными орудиями трактора, включающий корпус, подпружиненный золотник, взаимодействующий с гайкой, кинематически связанной с корпусом и валиком,соединенным с датчиком управления, отличающийся тем, что, с целью улучшения качества регулирования путем уменьшения гистерезиса регулятора, кинематические связи выполнены в виде шариков, размешенных во впадинах винтовых нарезок и продольных пазах, при этом винтовые нарезки выполнены на соответствующих поверхностях валика и гайки, а продольные пазы - на наружной поверхности гайки и внутренней корпуса. Источники информации, принятые во внимание при экспертизе 1.Башта Г. М. Машиностроительная гидравлика. М., 1971, с. 462. 2.Авторское свидетельство СССР № 664590, кл. А 01 В 63/10, 1978.
fl
10
Фиг,. I
