Изобретение относится к машиностроению и может быть использовано для.транспортировки технологического оборудования, например спутников с деталями в автоматизированном производстве, а также в манипуляторах портального типа.
.Известно устройство для перемещения рабочего органа, имеющее тяговьй орган, огибающий звездочки и состоящий из цепи и толкателя, представляющего собой ролик, установленный на удаленном пальце цепи. Устройство имеет также грузовую тележку, перемещающуюся по направляющим, на которой установлены упорные элементы в виде вертикальных взаимно смещенных пластин 1.
Недостатком данного устройства является:невозможность использования его в манипуляторах портального типа, а также невозможность переналадки положений грузовой тележки.
Наиболее близким к изобретению по технической сущности является . транспортирующее устройство, включающее упорное приспособление и установленную на горизонтальных направляющих , балки каретку с соединительньом элементом, размещенным с возможностью
взаимодействия с поводком цепи, имеющей привод и натяжнрй механизм 2.
Однако для известной конструкции характерна недостаточная надежность связи цепи С кареткой и сложность Натяжного механизма и упорного приспособления, что не позволяет достаточно широко применять устройство в производстве.
10
Целью изобретения является расширение технологических способностей устройства.
Указанная цель достигается тем, что транспортирующее устройство снабжено планками, смонтированными на балке параллельно горизонтальным направляющим с возможностью взаимодействия с цепью, при этом соединительный элемент выполней в виде вил20ки с пазом,, в котором размещеа поводок, причем натяжной механизм выполнен в виде втулки с внутренней резьбой в торцах и двух ушек, один конец каждого из которых закреплен на цепи
25 и имеет паз, а другой посредством резьбы закреплен в соответствующем торце. Кроме того, упорное приспособление выполнено в виде отверстий в балке и размещенного в одном из них
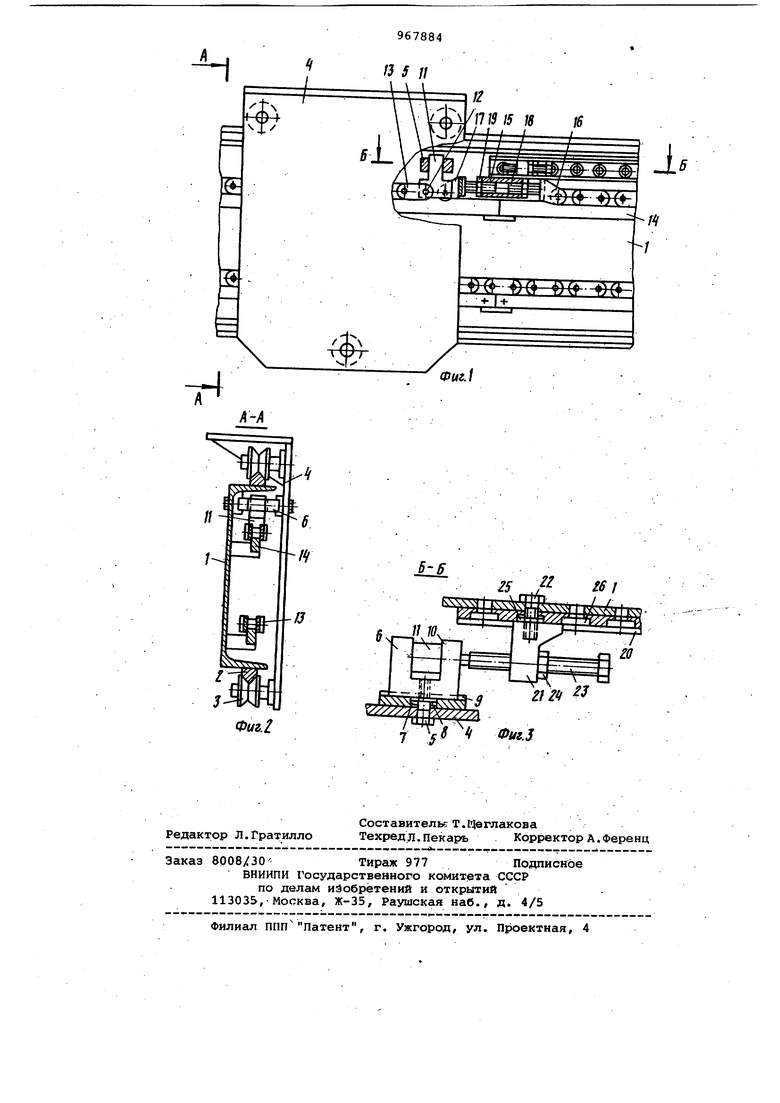
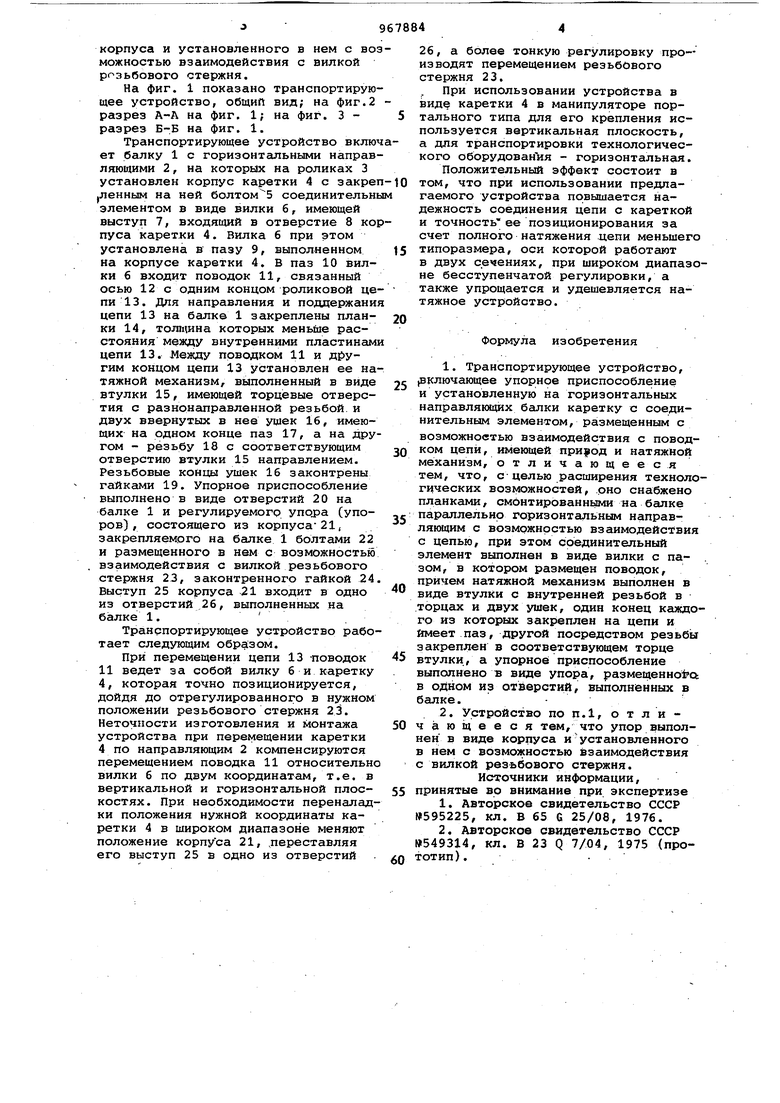
30 упора. Причем упор выполнен в виде корпуса и установленного в нем с во можностью взаимодействия с вилкой розьбового стержня. На фиг. 1 показано транспортирую щее устройство, общип вил; на фиг.2 разрез А-Л на фиг. 1; на фиг. 3 разрез Б-Б на фиг. 1. Транспортирующее устройство вклю ет балку 1 с горизонтальными направ ляющими 2, на которых на роликах 3 установлен корпус каретки 4 с закре |Ленным на ней болтом 5 соединительн элементом в виде вилки 6, имеющей выступ 7, входящий в отверстие 8 ко пуса каретки 4. Вилка б при этом установлена в пазу 9, выполненном на корпусе каретки 4. В паз 10 вилки б входит поводок 11, связанный осью 12 с одним концом роликовой це пи 13. Для направления и поддержани цепи 13 на балке 1 закреплены планки 14, толщина которых меньше расстояния между внутренними пластинам цепи 13. Между поводком 11 и другим концом цепи 13 установлен ее на тяжной механизм, выполненный в виде втулки 15, имеющей торцевые отверстия с разнонаправленной резьбой и двух ввернутых в нее ущек 16, имеющих на одном конце паз 17, а на дру гом - резьбу 18 с соответствующим отверстию втулки 15 направлением. Резьбовые концы ушек 16 законтрены гайкс1ми 19. Упорное приспособление выполнено в виде отверстий 20 на балке 1 и регулируемого упора (упоров) , состоящего из корпуса21, закрепляемого на балке 1 болтами 22 и размещенного в нем с возможностью взаимодействия с вилкой резьбового стержня 23, законтренного гайкой 24 Выступ 25 корпуса 21 входит в одно из отверстий ,26, выполненных на балке 1. Транспортирующее устройство рабо тает следующим образом. При перемещении цепи 13 -поводок 11 ведет за собой вилку 6 и каретку 4, которая точно позиционируется, дойдя до отрегулированного в нужном положении резьбового стержня 23. Неточности изготовления и монтажа устройства при перемещении каретки 4 по направляющим 2 компенсируются перемещением поводка 11 относительн вилки 6 по двум координатам, т.е. в вертикальной и горизонтгшьной плоскостях. При необходимости переналад ки положения нужной координаты каретки 4 в широком диапазоне меняют положение корпуса 21, .переставляя его выступ 25 в одно из отверстий 26, а более тонкую регулировку производят перемещением резьбового стержня 2 3. При использовании устройства в вид каретки 4 в манипуляторе портального типа для его крепления используется вертикальная плоскость, а для транспортировки технологического оборудования - горизонтальная. Положительный эффект состоит в том, что при использовании предлагаемого устройства повышается надежность соединения цепи с кареткой и точность ее позиционирования за счет полного натяжения цепи меньшего типоразмера, оси которой работают в двух сечениях, при широком диапазоне бесступенчатой регулировки, а также упрощается и удешевляется натяжное устройство. Формула изобретения 1.Транспортирующее устройство, включающее упорное приспособление и установленную на горизонтальных направляющих балки каретку с соединительным элементом, размещенным с возможностью взаимодействия с поводком цепи, имеющей при|од и натяжной механизм, отличающееся тем, что, с-целью расширения технологических возможностей, оно снабжено планками, смбнтированнь1ми на балке параллельно горизонтальным направляющим с возможностью взаимодействия с цепью, при этом соединительный элемент выполнен в виде вилки с пазом, в котором размещен поводок, причем натяжной механизм выполнен в виде втулки с внутренней резьбой в торцах и двух ушек, один конец каждого из которых закреплен на цепи и имеет паз, другой посредством резьбы закреплен в соответствующем торце втулки, а упорное приспособление выполнено в виде упора, размещенно а в одном из отверстий, выполненных в балке. 2.Устройство по П.1, о т ли чающееся тем, что упор выполнен в виде корпуса иустановленного в нем с возможностью взаимодействия с вилкой резьбового стержня. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР №595225, КЛ. В 65 G 25/08, 1976. 2.Авторское свидетельство СССР 549314, КЛ. Б 23 Q 7/04, 1975 (прототип).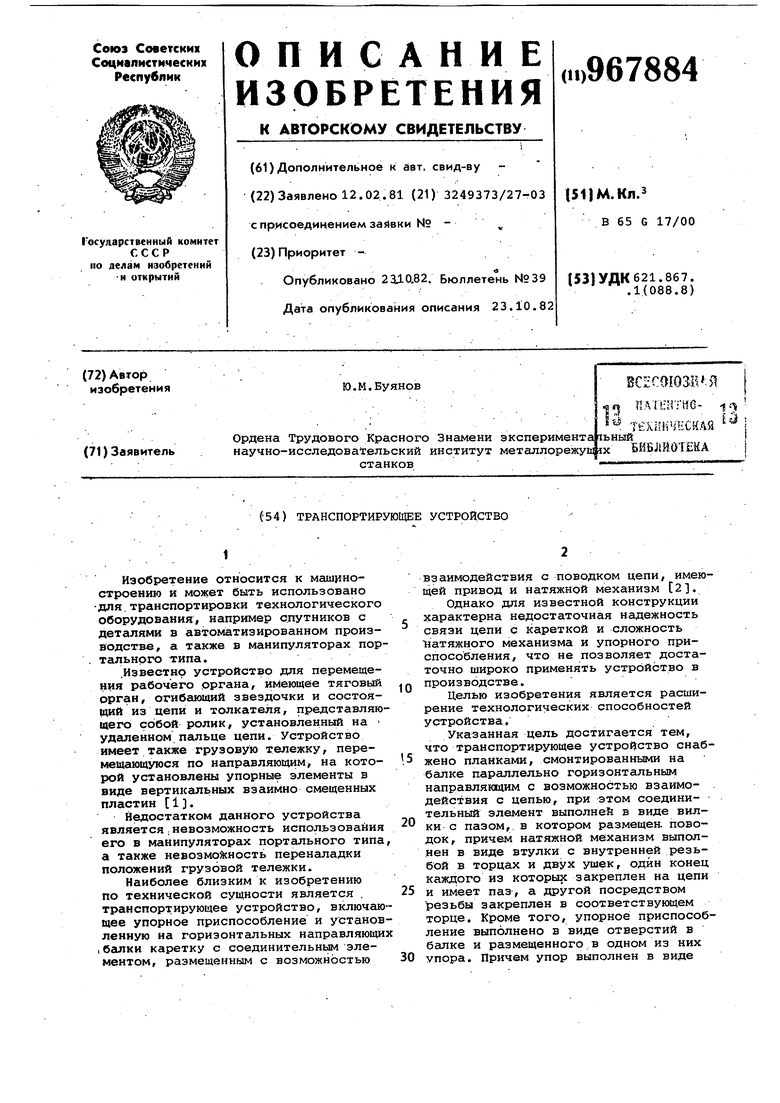
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для хранения и выдачи грузов | 1987 |
|
SU1449482A1 |
| Веломобиль | 1987 |
|
SU1512848A1 |
| Универсальный деревообрабатывающий станок | 1990 |
|
SU1797567A3 |
| КАМНЕОБРАБАТЫВАЮЩИЙ СТАНОК НА АЭРОСТАТИЧЕСКИХ ОПОРАХ | 2007 |
|
RU2347676C2 |
| Устройство для планетарной накатки резьб | 1988 |
|
SU1669625A1 |
| МАНОМЕТР С УЗЛОМ СИГНАЛИЗАЦИИ | 2006 |
|
RU2344392C2 |
| УВЕЛИЧИВАЮЩЕЕ СТЕРЕОСКОПИЧЕСКОЕ УСТРОЙСТВО | 1996 |
|
RU2106668C1 |
| Аппарат для механического передвижения и погружения стеклянных изделий в серебрильные и другие ванны | 1931 |
|
SU35981A1 |
| Устройство А.С.Кривовязюка для загрузки листового материала на каретку | 1984 |
|
SU1255245A1 |
| Вышивальная машина | 1980 |
|
SU1044696A1 |