(54) СТРОИТЕЛЬНЫЕ ПОДМОСТИ
| название | год | авторы | номер документа |
|---|---|---|---|
| Подмости самоподъемные | 1979 |
|
SU836318A1 |
| Грузоподъемный механизм подъемно-транспортного средства | 1986 |
|
SU1409575A1 |
| Грузоподъемный механизм подъемно-транспортного средства | 1990 |
|
SU1717523A2 |
| Устройство для прижима перевозимого груза в кузове транспортного средства | 1982 |
|
SU1055671A1 |
| Устройство для торцевания пакета бревен | 1985 |
|
SU1342843A1 |
| Смеситель сыпучих материалов | 1982 |
|
SU1101357A2 |
| ГРУЗОПОДЪЕМНОЕ СРЕДСТВО | 1990 |
|
RU2049041C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ САМОПОГРУЗКИ И ТРАНСПОРТИРОВКИ КРУПНОГАБАРИТНЫХ ОБЪЕКТОВ | 1992 |
|
RU2032559C1 |
| Машина для укладки сборно-разборных дорожных покрытий | 1984 |
|
SU1201391A1 |
| Ш БИБЛИОТЕКА | 1972 |
|
SU356196A1 |
Изобретение относится к подмостям для выполнения строительно-монтажных и ремонтных работ, в частности к подмостям, рабочая площадка которых имеет возможность изменения положения по высоте относительно основания. Изобре тение может быть использовано в строительстве, при эксплуатации высоких помещений и в авиа- и судостроении.
Известны подмости, состоящие из сэснования рабочей площадки, системы перекрещивающихся рычагов и механизма; фиксации положения рабочей площадки По высоте, выполненного в виде храпового колеса, связанного с трособлочной системой 1.
Недостатком этого устройства является наличие значительных напряжений .JB канате и храповом механизме, что может привести к отказу в работе и ограничивает грузоподъемность подмостей7 .
Наиболее близким техническим решением являются подмости, в которых механизм фиксации выполнен с трособлочной системой, с дополнительными осями и блоками, червячным редуктором.
Недостатком известного устройства является необходимость включения электродвигателя даже при опускании
платфор№л, невозможность использования других грузоподъемных механизмов, как смонтированных на подмостях, так и внешних, например крана 2.
Цель изобретения - снижение напряжения, в трособлочной системе.
Поставленная цель достигается тем, ЧТО подмости, состоящие из основания, рабочей площадки, системы перекрывающихся рычагов, механизма фиксации положения рабочей площадки по высоте, выполненного из храпового механизма и трособлочной системы, снабжены лебедкой, двумя барабанами, жестко закрепленными на тихоходном валу лебедки и дополнительным тросом с грузом, а храповой механизм снабжен средством дистанционного управления,
20 причем лебедка установлена снизу рабочей плошадки, а ее быстроходный вал соединен с храповым механизмом, при этом трос трособлочной системы закреплен на основании и запасован на один из барабанов, а на другой барабан запасован дополнительный трос с грузом в противоположном направлении основному тросу.
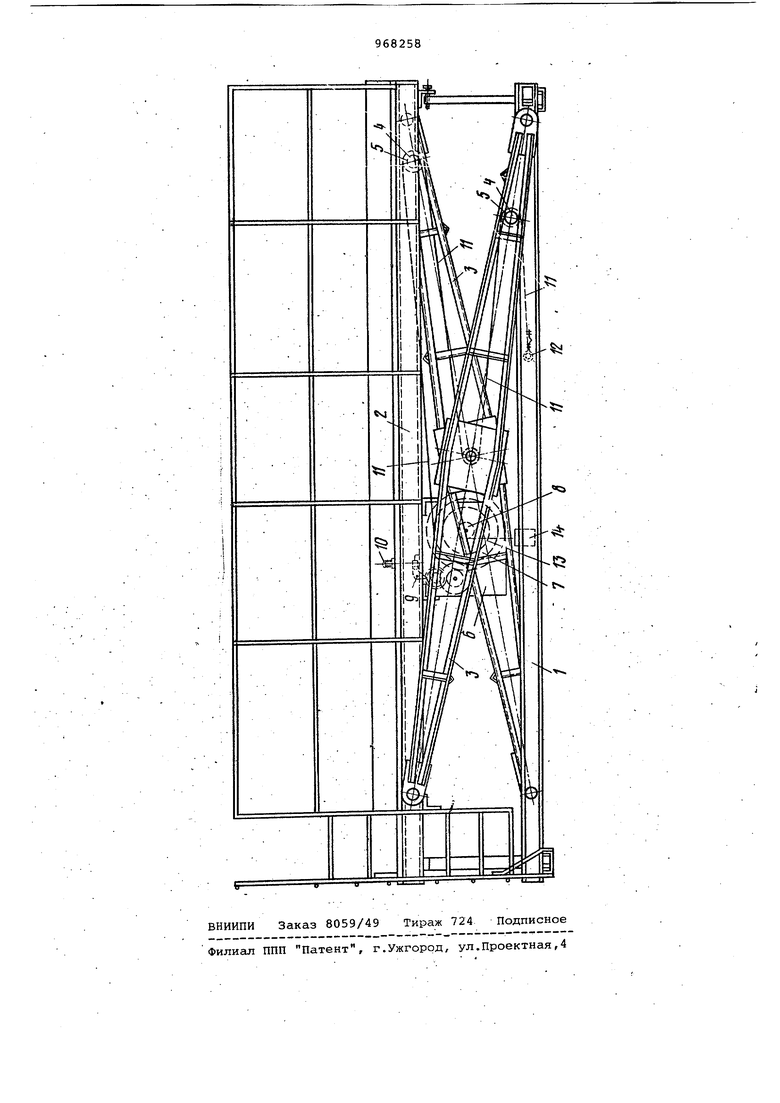
На чертеже изображены строительные подмости.
I Подмости состоят из основания 1, рабочей площадки 2, попарно перекрывающихся рьиагов 3 с поперечными жесткими связями 4, оборудованными блоками 5, установленными на свяэах 4 с возможностью вращения вокруг них лебедки б напольного типа без привода, укрепленной к рабочей площадке 2 и имеющей на тихоходном валу два барабан а различного диаметра - больше.го диаметра .7 и меньшего диаметра 8, оба барабана 7 и 8 жестко закреплены на тихоходном валу лебедки 6, собачка 9 храпового механизма снабжена средством дистанционного управления, выведенным на верхнюю часть рабочей площадки 2 и выполненным в виде, подпружиненного штока 10. Основной трос 11 закреплен на основании 1 на неподвижном валу 12, пропущен через все .блоки 5 и запасован на бара.баН 7 большого диаметра лебедки 6. Дополнительный трос 13 с грузом 14 .запасован на барабан меньшего диаметра 8 в противоположную сторону основного троса 11. .
Предлагаемые подмости могут взаимодействовать с любым видом, грузо- подъемных механизмов, смонтированных как непосредственно на подмостях.,так и установленных отдельно от них. Высота рабочей площадки 2 фиксируется в любой точке движения ее вверх и вниз.
При подъеме/рабочей площадки 2 основной трос 11 провисает, что приводит к повороту тихоходного вала лебедки 6 под действием груза 14, при этом храповой механизм свободно поворачивается, слабина основного троса 11 выбирается. Храповой меха-, низм готов в-любой момент остановки подъема зафиксировать положение быстроходного вала лебедки б, что приведет к фиксированию положения рабочей площадки 2,
При необходимости опускания рабочей площадки 2 необходимо грузоподъемным механизмом компенсировать вес рабочей площадки 2, что снимет напряжение на храповом механизме. Собачку 9 храпового механизма теперь
легко вывести из зацепления с храповым колесом. После этого рабочую площадку опускают на любую величину. Фиксация возможна в любом новом положении рабочей площадки 2.
Полезность изобретения - в разгрузке храпового механизма, что очень важно при значительной грузоподъемности подмостей, так как рычажная система подмостей предопределяет значительное npeBHUjeHHe напряжений против веса нагруженной рабочей рлощадки 2. Предлагаемые подмости характеризуются надежностью и .простотой управления, а также универсальностью привода и простотой изготовления.
Формула изобретения
Строительные подмости, состоящие из основания, рабочей площадки, системы перекрещивающихся рычагов, механизма, фиксации положения рабочей плош.адки по дысоте, выполненного из храпового механизма и трособлочной системы, отличающиес я тем, что, с целью увеличения надежности, подмости снабжены лебедкой, двумя барабанами, жестко закрепленньлми на тихоходном валу лебедки, и дополнительным тросом с грузом, а храповой механизм снабжен средством дистанционного управления, причем лебедка установлена снизу рабочей площадки, а ее быстроходный вал соединен с храповым механизмом, при этом трос троСоблочной системы закреплен на основании и запасован на один из .барабанов, а на другой барабан запасован дополнительный трос с грузом в противоположном направлении основному тросу.
.Источники информации, принятые во внимание при экспертизе
