Изобретение относится к горному делу, преимущественно к способам контроля положения проходческого комбайна в выработке, и может быть использовано для контроля направления движения проходческого комбайна в вертикальной плоскости.
Известен способ контроля положения комбайна на жесткой привязке, в котором осуществляется привязка положения комбайна к направленному по лаве или по проходческому тоннелю световому лучу, при этом могут применяться оптические задатчики или лазеры и установленные на комбайяе фотоприемники 1.
Недостатком способа является невозможность однозначного определения угла отклонения и линейного смещения комбайна от неподвижного оптического луча.
,Известен та1ше способ контроля положения комбайна в вертикальной плоскости, включающий измерение углов тангажа и крена с помощью двух диаметрально противоположных пар электрических преобразователей, соприкасающихся с псмощью силоизмерительных элементов с металлическим шаром, находящимся в корпусе, основание которого прикреплено к горной машине 2.
Недостатками известного способа являются низкая надежность и точность контроля, связанные с колебательными движениями шара в корпусе и влияниями трибоэлектрического эффекта, а также с влиянием деформаций силоизмерительных элементов.
10
Целью изобретения является повышение надежности и точности контроля.
Указанная цель достигается тем, что измеряют барометрическое давление в крайних точках продольной и
15 поперечной осей комбайна и по знаку и величине изменения разности давлений в противоположных точках на продольной и поперечной осях судят соответственно о направлении и величи20не углов тангажа и крена комбайна.
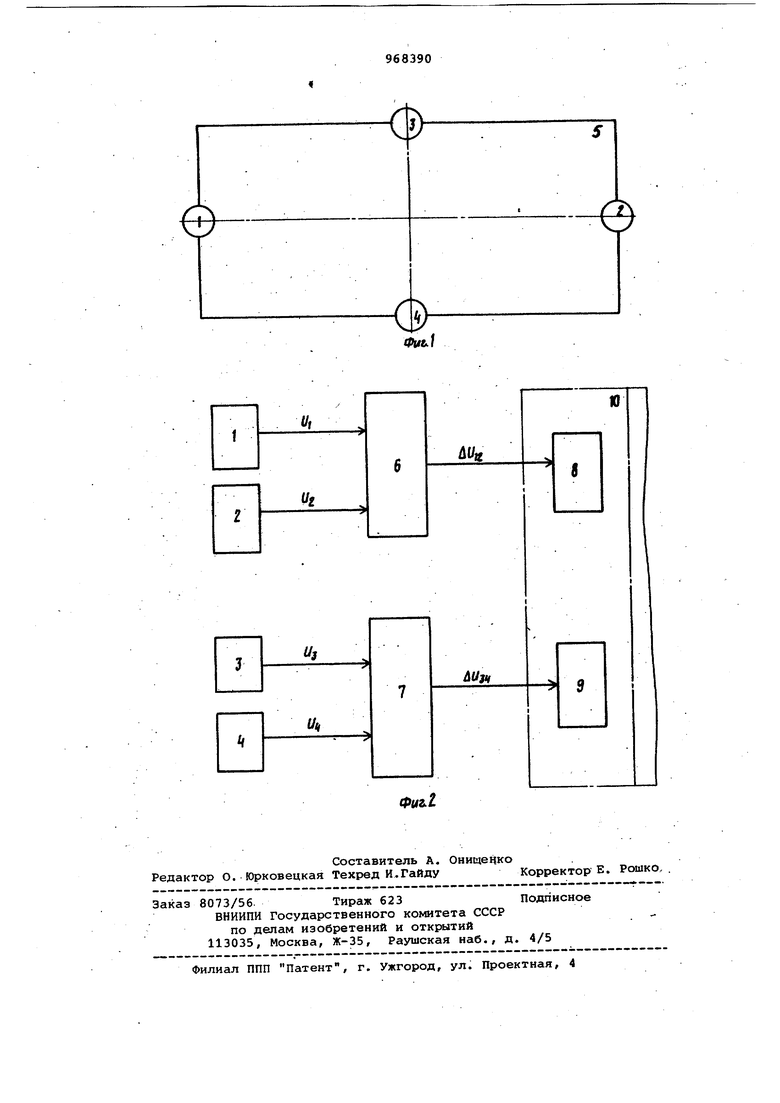
На фиг. 1 показано расположение барометрических датчиков давления на корпусе комбайна; на фиг. 2 функциональная блок-схема устройства
25 для реализации способа.
Барометрические датчики 1 и 2 давления установлены в крайних точках продольной оси комбайна, а барометрические датчики 3 и 4 - в крайних
30 точках поперечной оси корпуса 5 комбайна (фиг, 1). Выходы барометричес ких датчиков 1 и 2 давления соедине ны с входами сравнивающего усилителя б , а выходы датчиков 3 и 4 с входами сравнивающего усилителя 7 К выходам сравнивающих усилителей подсоединены индикаторы угла тангажа 8 и угла крена 9, установленные на пульте 10 дистанционного управле ния комбайном (фиг. 2). Устройство работает следующим об разом. Электрические сигналы U, U2, Uj и U с выходов датчиков 1-4 поступа ют на входы сравнивающих усилителей б и 7. На выходе сравнивающего усилител.т 6 формируется разностный сиг нал AUi3.OT датчиков 1 и 2, а на вы ходе Сравнивающего; усилителя 7 формируется разностный сигнал от датчиков 3 и 4. Начальному положению -комбайна соответствуют началь ный значения сформированных разност ных сигналов которые принимаются за исходные. При работе комбайна изменяется его угол тангажа и угол крена и соо ветственно изменяются разностные сигналы. Величина изменения разност ного сигнала uU будет пропорционал на изменению угла тангасжа и будет индицироваться индикатором 8, а вели чина изменения разностного сигнала л и 34 пропорциональная изменению угла крена, индицируется индик атором 9. Устройство было проверено на проходческом комбайне Ясиноватец-2 с распорно-шагающим механизмом перемещения. В качестве барометрических датчиков давления использовались микробарографы типа М-75. Датчик 1 устанавливался в передней части рамы комбайна на его продольной оси, а датчик 2 - в задней части рамы комбайна на его продольной оси на расстоянии.14 м от датчика 1. Датчики 3 и 4 установлены в крайних точках рамы комбайна на его .поперечной оси на расстоянии 4 м друг.от друга. Минимальная величина угла, которую возможно измерять данным способо определяется по формуле oL arctg у , где ct - угол-смещения комбайна; а - минимальная чувствительност барометрического датчика давления к вертикальному смещению, м; t - расстояние между двумя противоположными датчиками. .При использовании барометрических датчиков давления типа М-75 устройство для реализации.способа позволяет фиксировать углы тангажа (отклонения продольной оси комбайна в вертикальной плоскости) до 35 при минимальной чувствительности датчиков к вертикашьному смещении). 0,28 м и углы крена (отклонения поперечной оси комбайна в вертикальной плоскости) до 1° . Выходы датчиков 1 и 2 соединялись с входами дифференциального усилите-ля б, а выходы датчиков 3 и 4 - с входами дифференциального усилителя 7. В свою очередь выходы усилителей б и 7 подсоединялись к милливольтметру типа НЗООб, который служил в качестве индикаторов 8 и 9. Погрешность измерения углов крена и тангажа не превышала 20%. Таким образом, изобретение позволяет определять угловые отклонения от первоначального положения продольной и поперечной осей комбайна, а не относительные линейные изменения взаимногоположения контрольных точек на комбайне и в выработке; обеспечить полную автономность контроля без привязки к выработке; обеспечить возможность дистанционной передачи результатов; снизить трудозатраты, связанные с уменьшением вспомогательных операций при удалении комбайна от контролируемой точки для дополнительного перемещения оборудования; повысить надежность за счет упрощения, уменьшения влияния влажно-сти и запыленности воздуха. Формула изобретения Способ контроля положения комбайна в вертикальной плоскости, основанный на измерении углов тангажа и крена, отличающийся, тем, что, с целью повышения надежности и точности контроля, измеряют барометрическое давление в крайних точках продольной и поперечной осей комбайна и по знаку и величине изменения разности давлений в противоположных точках на продольной и поперечной осях судят соответственно о направлении и величине тангажа и крена комбайна.. Источники информации, принятые во внимание при экспертизе ; 1.Мелькумов Л. Г. и др. Автоматизация технологических процессов угольных шахт. М., Недра, 1973, с. 34. 2.Авторское свидетельство СССР 794209, кл. Е 21 В 47/00, 1978 (прототип).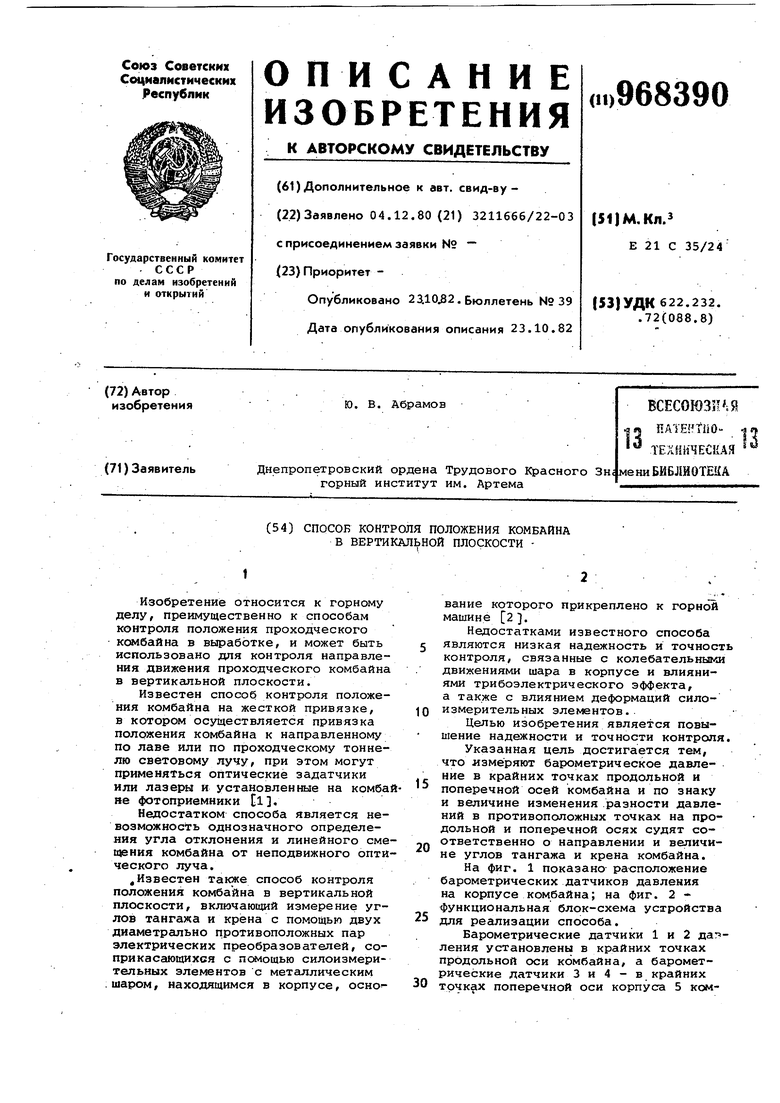
| название | год | авторы | номер документа |
|---|---|---|---|
| Роботизированное измерительное устройство с манипулятором и способ его применения | 2023 |
|
RU2827417C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СТРОИТЕЛЬНОЙ МАШИНОЙ | 1994 |
|
RU2089708C1 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ ГОРИЗОНТАЛЬНОЙ ОРИЕНТАЦИИ АППАРАТА | 2007 |
|
RU2373562C2 |
| УСТРОЙСТВО ПРЕДУПРЕЖДЕНИЯ ОБ ОПАСНОМ УГЛЕ ТАНГАЖА ДЛЯ УЛУЧШЕННОЙ СИСТЕМЫ ПРЕДУПРЕЖДЕНИЯ ОПАСНОГО СБЛИЖЕНИЯ С ЗЕМЛЕЙ (УСПОС) | 2002 |
|
RU2282157C2 |
| Система автоматического управления движением коллекторного проходческого щита | 1988 |
|
SU1599537A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПОСТРОИТЕЛЯ ВЕРТИКАЛИ И ДАТЧИКОВ СКОРОСТЕЙ ЛЕТАТЕЛЬНОГО АППАРАТА | 2001 |
|
RU2187141C1 |
| Система автоматического ведения горнопроходческого щита | 1983 |
|
SU1122823A1 |
| СПОСОБ АВТОНОМНОГО ФОРМИРОВАНИЯ ПОСАДОЧНОЙ ИНФОРМАЦИИ ДЛЯ ЛЕТАТЕЛЬНОГО АППАРАТА И БОРТОВОЙ РАДИОЛОКАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2006 |
|
RU2303796C1 |
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ПОДДЕРЖКИ ЭКИПАЖА | 2015 |
|
RU2598130C1 |
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ПОДДЕРЖКИ ЭКИПАЖА | 2013 |
|
RU2541902C2 |