Область техники
Настоящее изобретение связано с интеллектуальными технологиями добычи угля, в частности, касается роботизированного измерительного устройства с манипулятором и способа применения такого устройства.
Уровень техники
В настоящее время работы в шахтных забоях ведутся по принципу «чем меньше людей, тем безопаснее» (букв, «безопасно, когда мало людей, а без них еще безопаснее»). Основными работами, выполняемые при малом составе работников или вовсе при отсутствии человека, являются автоматическое измерение и передача геодезических координат, автоматическое определение координат оборудования и создание базы для интеллектуальной добычи ископаемых и оказания сопутствующих услуг. В существующих на сегодня методах измерения забойных параметров имеются следующие недостатки:
(1) Для измерения геодезических координат с применением интеллектуальных технологий добычи и посредством человеко-машинного взаимодействия (для полигонометрических съемок требуется трое человек и две контрольные точки) требуется большой штат работников при том, что работы ведутся в суровых условиях окружающей среды, с большими трудностями и низкой временной эффективностью, при этом невозможно уменьшить штат.
(2) С динамикой развития рабочих поверхностей забоев разрушаются пространственные отношения, чем обусловливается невозможность позиционирования интеллектуальных поверхностей в реальном времени.
(3) В комплексных забоях для добычи полезных ископаемых измерительные роботы устанавливаются на верхних балках механизированных гидравлических крепей, а в проходческих забоях - в кровлях. Однако, поскольку такие измерительные роботы располагаются в верхних частях или вершинах забоев, они пригодны только для применения в поверхностях средней и большой толщины и не пригодны для применения в тонких и сверхтонких пластах, имеющих ограничения по высоте и пространственные ограничения. Если использовать такие роботы в работе с тонкими и сверхтонкими пластами, то их высота может стать причиной их столкновений или трения о другое оборудование, в результате чего оборудование повреждается и невозможно продолжать работу.
Сущность изобретения
Для решения вышеперечисленных задач настоящим изобретением предлагаются способ и система автоматической навигации и создания фиксирующих разрезов для проходческих комбайнов консольного типа.
Настоящим изобретением предложен измерительный робот с механическими руками, включающий в свою конструкцию: тахеометр с функцией автоматического выравнивания, защитный механизм, механизм выравнивания высоты, механизм регулирования крена, вертикальное поворотное устройство, контроллер, монтажное основание и мобильный терминал.
Упомянутый тахеометр с функцией автоматического выравнивания включает в себя: непосредственно тахеометр, нижний механизм выравнивания и стеклянный корпус.
Упомянутый тахеометр представляет собой интегральную измерительную платформу, выполняющую функции автоматического поиска цели, автоматического распознавания, автоматического коллимации, автоматического измерения угла и дальности, автоматического отслеживания цели, автоматического расчета и автоматического хранения, такой гироскопический тахеометр может быть двух типов: с гироскопом с ориентацией на север или без него.
Упомянутый нижний механизм выравнивания состоит из трех подъемных винтов, он является механизмом автоматического выравнивания, которым оснащается упомянутый тахеометр, и служит средством нахождения горизонтальной плоскости для упомянутого тахеометра.
Упомянутый стеклянный корпус имеет форму прямоугольного параллелепипеда, в который помещаются упомянутый тахеометр и упомянутый нижний механизм выравнивания и роль которого заключается в защите тахеометра и механизма выравнивания от воздействия воды и пыли.
В упомянутом стеклянном корпусе установлены датчики углов тангажа и крена, служащие для точного восприятия углов тангажа и крена упомянутого стеклянного корпуса.
Упомянутый защитный механизм устанавливается снаружи упомянутого стеклянного корпуса и может иметь форму прямоугольного параллелепипеда,, причем такой защитный механизм может обеспечивать для упомянутого роботизированного измерительного устройства с манипулятором всестороннюю защиту, предотвращая его от попадания пыли и влаги во время остановки.
Упомянутый защитный механизм оснащен автоматической системой продувки; перед применением упомянутого роботизированного измерительного устройства с манипулятором открывается упомянутый защитный механизм, а после завершения работы упомянутого роботизированного измерительного устройства с применением упомянутой автоматической системы продувки проводится очистка мест сопряжения упомянутого защитного механизма от пыли и посторонних тел, после чего упомянутый защитный механизм закрывается.
Упомянутый механизм выравнивания высоты представляет собой манипулятор, которой упомянутое роботизированное измерительное устройство с манипулятором совершает поступательные движения в продольном направлении.
Для упомянутого механизма выравнивания высоты устанавливается угол тангажа, варьирующийся в пределах от -90° до 90° и позволяющий тахеометру, перемещающемуся в продольном направлении, достигать указанного положения, причем угол, рассматриваемый в месте, где упомянутый тахеометр находится над горизонтальной линией, является углом возвышения с положительным значением (0°~90°, угол 90° означает вертикальное возвышение), а угол, рассматриваемый в месте, где упомянутый тахеометр находится под горизонтальным углом, является углом понижения с отрицательным значением (-90°~0°, угол -90° означает вертикальное понижение).
Упомянутый механизм выравнивания высоты оснащен датчиком (детектором) препятствий, предназначенным для обнаружения препятствий, находящихся на пути движения упомянутого механизма выравнивания высоты, а в случае обнаружения на пути его движения препятствий или преград срабатывает аварийная остановка и издается сигнал тревоги.
Упомянутый механизм выравнивания высоты также оснащен датчиком контроля положения, используемым для фиксирования положения упомянутого роботизированного измерительного устройства с манипулятором, когда он, перемещаясь в продольном направлении, достигает заданного места.
Для упомянутого механизма выравнивания высоты могут применяться два типа привода: гидравлический и электрический.
Упомянутый механизм регулирования крена представляет собой роботизированное измерительное устройство с манипулятором, в котором упомянутое устройство совершает поступательные движения в направлении курса.
Упомянутый механизм регулирования крена оснащен датчиком (детектором) препятствий, предназначенным для обнаружения препятствий, находящихся на пути движения упомянутого механизма регулирования крена, а в случае обнаружения на пути его движения препятствий или преград срабатывает аварийная остановка и издается сигнал тревоги.
Для упомянутого механизма регулирования крена устанавливается курсовой угол, варьирующийся в пределах от 0° до 360° и обеспечивающий возможность движения тахеометра в направлении заданного курса.
Упомянутый механизм регулирования крена также оснащен датчиком контроля положения, используемым для фиксирования положения упомянутого измерительного робота с механическими руками, когда он, перемещаясь в направлении курса, достигает заданного места.
Для упомянутого механизма регулирования крена могут применяться два типа привода: гидравлический и электрический.
Упомянутое вертикальное поворотное устройство представляет собой приводное устройство, обеспечивающее вращение упомянутого роботизированного измерительного устройства с манипулятором вокруг центральной вертикальной оси и предназначенное для точного контроля крена упомянутого роботизированного измерительного устройства.
В упомянутом контроллере установлена программа управления роботизированного измерительного устройства, которая с учетом предварительно заданных углов тангажа, протяженности движений упомянутого тахеометра в продольном направлении, крена и протяженности движений в направлении курса перемещает упомянутый тахеометр в заданное место и в автоматическом режиме управляет всем процессом функционирования упомянутого измерительного робота с механическими руками.
Упомянутое монтажное основание предназначено для фиксирования положения упомянутого роботизированного измерительного устройства, причем такое монтажное основание подходит для любого места установки или оборудования, в том числе может быть установлено: на опорном цилиндровом механизме в гидравлических крепях, между двумя вертикальными колоннами гидравлических крепей, в кабельном канале и на другом оборудовании в комплексно-механизированных очистных забоях, а также на кровле отсека центрального управления, в хвостовом отделе проходческого комбайна и на другом оборудовании в проходческих забоях.
С помощью упомянутого мобильного терминала осуществляется мониторинг рабочего положения и предупреждающих сообщений по меньшей мере одного упомянутого роботизированного измерительного устройства в реальном времени и отправляются управляющие команды в упомянутый контроллер для управления роботизированного измерительного устройства путем человеко-машинного взаимодействия.
Дополнительной возможностью является то, что датчики препятствий, которыми оснащаются упомянутый механизм выравнивания высоты и упомянутый механизм регулирования крена, отвечают за обнаружение в реальном времени препятствий или преград, появляющихся на пути движения механизмов, в которых установлен каждый из них, с тем, чтобы своевременно вмешаться и подать сигнал аварийной остановки для защиты упомянутого роботизированного измерительного устройства с манипулятором, предотвращая сдавливание и столкновения, приводящие к поломке оборудования или травмированию персонала.
Упомянутый датчик препятствий включает в себя: датчик давления и бесконтактный датчик приближения.
Датчики давления в упомянутом механизме выравнивания высоты и упомянутом механизме регулирования крена позволяют в случае превышения предельного значения давления своевременно подавать сигнал аварийной остановки для защиты упомянутого роботизированного измерительного устройства, при этом механизмы, в которых установлены эти датчики, прекращают поступательные движения и подается сигнальное оповещение о наличии сопротивления на пути их движения, и таким образом предотвращать поломку упомянутого тахеометра и оборудования в целом или травмирование персонала.
Бесконтактные датчики приближения в упомянутом механизме выравнивания высоты и упомянутом механизме регулирования крена позволяют в случае присутствия поблизости человека или оборудования своевременно подавать сигнал аварийной остановки и включать светозвуковую сигнализацию для защиты упомянутого роботизированного измерительного устройства с манипулятором, при этом механизмы, в которых установлены эти датчики, прекращают поступательные движения и подается сигнальное оповещение о приближении человека или оборудования, чтобы избежать столкновения упомянутого роботизированного измерительного устройства с манипулятором с человеком или оборудованием. В состав упомянутого бесконтактного датчика приближения входят: инфракрасная фотокамера, ультразвуковые волны, AI-видео, UWB-передатчик, лазерный дальномер и лазерный радар.
Дополнительной возможностью является то, что в условиях, когда весовая нагрузка отвечает требованиям и упомянутый тахеометр не вращается вокруг продольной оси, достаточно использовать один упомянутый механизм выравнивания высоты и один упомянутый механизм регулирования крена;
В условиях, когда весовая нагрузка не отвечает требованиям или упомянутый тахеометр может вращаться вокруг продольной оси, необходимо использовать по меньшей мере два упомянутых механизма выравнивания высоты и два упомянутых механизма регулирования крена, которые должны предотвращать перевес и вращение тахеометра вокруг продольной оси.
Дополнительной возможностью является то, что упомянутое роботизированное измерительное устройство с манипулятором может пребывать в одном из трех состояний: в начальном положении холостого хода, рабочем положении и положении аварийной остановки.
Под начальным положением холостого хода подразумевается положение, когда упомянутый тахеометр не работает.
Под рабочим положением подразумевается положение, когда упомянутый тахеометр находится в заданном рабочем месте и функционирует в штатном режиме.
Под положением аварийной остановки подразумевается положение, когда на пути телескопических движений упомянутого механизма выравнивания высоты или упомянутого механизма регулирования крена встретились препятствия или преграды и требуется вмешательство человека, чтобы устранить неполадки.
При этом, начав функционировать, упомянутый измерительный робот с механическими руками переходит из исходного положения холостого хода в рабочее положение, а завершив работу, из рабочего положения снова переходит в исходное положение холостого хода.
Дополнительной возможностью является то, что упомянутое роботизированное измерительное устройство с манипулятором начинает двигаться в начальной точке с учетом предварительно заданных угла тангажа и крена, имея множество степеней свободы, совершает поступательные движения с помощью упомянутого механизма выравнивания высоты и упомянутого механизма регулирования крена и перемещает упомянутый тахеометр в установленное рабочее место.
После того, как автоматическое выравнивание выполнено и измерительные работы с применением тахеометра завершены, упомянутое роботизированное измерительное устройство с манипулятором начинает выходить из рабочего места и в обратном порядке и направлении совершает поступательные движения с помощью упомянутого механизма выравнивания высоты и упомянутого механизма регулирования крена, имеющих множество степеней свободы, перемещая упомянутый тахеометр в упомянутую начальную точку.
Дополнительной возможностью является то, что поступательные движения, совершаемые упомянутым роботизированным измерительным устройством с манипулятором в продольном направлении и направлении курса с учетом упомянутых предварительно заданных угла тангажа и крена, могут совершаться в следующих двух последовательностях: сначала в продольном направлении, затем в направлении курса, либо сначала в направлении курса, затем в продольном направлении.
Если при переходе из упомянутого исходного положения холостого хода в упомянутое рабочее положение поступательные движения выполняются сначала упомянутым механизмом выравнивания высоты в продольном направлении, а затем упомянутым механизмом регулирования крена в направлении курса, то при обратном переходе из упомянутого рабочего положения в упомянутое исходное положение холостого хода поступательные движения выполняются сначала упомянутым механизмом регулирования крена в направлении курса, а затем упомянутым механизмом выравнивания высоты в продольном направлении, таким образом обеспечивается проходимость траектории движения и проходимость упомянутого тахеометра.
Если при переходе из упомянутого исходного положения холостого хода в упомянутое рабочее положение поступательные движения выполняются сначала упомянутым механизмом регулирования крена в направлении курса, а затем упомянутым механизмом выравнивания высоты в продольном направлении, то при обратном переходе из упомянутого рабочего положения в упомянутое исходное положение холостого хода поступательные движения выполняются сначала упомянутым механизмом выравнивания высоты в продольном направлении, а затем упомянутым механизмом регулирования крена в направлении курса, таким образом обеспечивается проходимость траектории движения и проходимость упомянутого тахеометра.
Дополнительной возможностью является то, что упомянутое роботизированное измерительное устройство с манипулятором совершает поступательные движения в продольном направлении и направлении курса с учетом упомянутых предварительно заданных угла тангажа и крена, имея множество степеней свободы.
Если при переходе из упомянутого исходного положения холостого хода в упомянутое рабочее положение упомянутым механизмом выравнивания высоты или упомянутого механизма регулирования крена совершается выдвижение, то при обратном переходе из упомянутого рабочего положения в упомянутое исходное положение холостого хода упомянутым механизмом регулирования крена или упомянутым механизмом выравнивания высоты совершается складывание, чтобы таким образом обеспечить проходимость траектории движения и проходимость упомянутого тахеометра.
Если при переходе из упомянутого исходного положения холостого хода в упомянутое рабочее положение упомянутым механизмом выравнивания высоты или упомянутым механизмом регулирования крена совершается складывание, то при обратном переходе из упомянутого рабочего положения в упомянутое исходное положение холостого хода упомянутым механизмом регулирования крена или упомянутым механизмом выравнивания высоты совершается выпрямляющее действие, чтобы таким образом обеспечить проходимость траектории движения и проходимость упомянутого тахеометра.
Дополнительной возможностью является то, что если в момент прибытия упомянутого измерительный робот с механическими руками в упомянутое предварительно заданное место значения углов тангажа и крена упомянутого стеклянного корпуса вышли за пределы заданного диапазона, включение функции автоматического выравнивания тахеометра невозможно, при этом подается сигнальное оповещение о превышении допустимых предельных значений углов тангажа и крена упомянутого стеклянного корпуса;
Включение упомянутого тахеометра возможно только в условиях, когда значения углов тангажа и крена упомянутого стеклянного корпуса находятся в пределах заданного углового диапазона, а когда значения углов тангажа и крена упомянутого стеклянного корпуса выходят за пределы упомянутого заданного углового диапазона, упомянутый тахеометр, ограничиваемый длиной, шириной и высотой внутренней полости упомянутого стеклянного корпуса, выходит за пределы выравнивания, и автоматическое выравнивание не представляет возможным.
Если во время работы упомянутого тахеометра в штатном режиме, когда углы тангажа и крена упомянутого стеклянного корпуса контролируются в реальном времени, значения данных углов выходят за пределы заданного углового диапазона, то упомянутый измерительный робот с механическими руками в экстренном порядке прекращает функционировать, при этом подается сигнальное оповещение о превышении допустимых предельных значений углов тангажа и крена упомянутого стеклянного корпуса.
Дополнительной возможностью является то, что установленные высота и ширина внутренней полости упомянутого стеклянного корпуса позволяют упомянутому тахеометру свободно вращаться на 360 градусов в продольном направлении вокруг продольной оси внутри корпуса и окуляру для наблюдения - свободно вращаться на 360 градусов, более того, с возможностью автоматического выравнивания упомянутый тахеометр должен свободно вращаться и перемещаться в пределах максимального диапазона углов тангажа и крена.
В середине верхней части упомянутого тахеометра установлена обычная или круговая призма 360 градусов, позволяющая использовать местоположение упомянутого тахеометра в качестве целевой точки переднего обзора или контрольной точки заднего обзора для остальных тахеометров.
С другой стороны, настоящим изобретением предложен способ применения роботизированного измерительного устройства с манипулятором по любому из приведенных выше пунктов, в котором, переход из исходного положения в рабочее механизмов выравнивания высоты и регулирования крена, включает в себя следующие этапы:
При запуске упомянутого измерительного робота с механическими руками, когда он находится в начальном положении холостого хода, механизмом выравнивания высоты совершается выпрямляющее действие, датчиком препятствий, установленным на упомянутом механизме выравнивания высоты, в режиме реального времени определяется наличие или отсутствие в районе выдвижения упомянутого механизма выравнивания высоты препятствий или преград, а датчик контроля положения упомянутого механизма выравнивания высоты в режиме реального времени определяет, выдвинут ли упомянутый механизм выравнивания высоты до требуемого положения.
Если в районе выдвижения упомянутого механизма выравнивания высоты нет препятствий, но он не выдвинут до требуемого положения, то продолжает выдвигаться до тех пор, пока не достигнет заданного положения, а если во время выдвижения упомянутого механизма выравнивания высоты обнаруживаются препятствия, то его выпрямляющее действие останавливается в экстренном порядке, подается сигнал об аварийном положении механизма выравнивания высоты и срабатывает аварийная остановка.
После того, как выдвинут упомянутый механизм выравнивания высоты, упомянутое роботизированное измерительное устройство с манипулятором выпрямляет механизм регулирования крена, датчиком препятствий, установленным на упомянутом механизме регулирования крена, в режиме реального времени определяется наличие или отсутствие в районе выдвижения упомянутого механизма регулирования крена препятствий или преград, а датчик контроля положения упомянутого механизма регулирования крена в режиме реального времени определяет, выдвинут ли упомянутый механизм регулирования крена до требуемого положения.
Если в районе выдвижения упомянутого механизма регулирования крена нет препятствий, но он не выдвинут до требуемого положения, то продолжает выдвигаться до тех пор, пока не достигнет заданного положения, а если во время выдвижения упомянутого механизма регулирования крена обнаруживаются препятствия, то его выпрямляющее действие останавливается в экстренном порядке, подается сигнал об аварийном положении механизма регулирования крена и срабатывает упомянутая аварийная остановка.
После того, как выдвинут упомянутый механизм регулирования крена, определяется, не превышают ли предельные значения углы тангажа и крена упомянутого стеклянного корпуса.
Если превышают, то срабатывает аварийная остановка для защиты упомянутого измерительного робота с механическими руками и подается сигнальное оповещение о превышении предельных значений угла тангажа или крена упомянутого стеклянного корпуса, а если не превышают, то открывается упомянутый защитный механизм.
После открывания упомянутого защитного механизма упомянутый тахеометр автоматически выравнивается и переходит в нормальное рабочее положение.
Во время функционирования упомянутого тахеометра в нормальном рабочем положении в режиме реального времени определяется, не превышают ли предельные значения угла тангажа и крена упомянутого стеклянного корпуса;
Если превышают, то срабатывает аварийная остановка для защиты упомянутого измерительного робота с механическими руками и подается сигнальное оповещение о превышении предельных значений угла тангажа или угла крена упомянутого стеклянного корпуса.
После завершения работы упомянутого тахеометра с применением упомянутой автоматической системы продувки проводится очистка мест сопряжения упомянутого защитного механизма, после чего упомянутый защитный механизм закрывается.
После закрытия упомянутого защитного механизма упомянутое роботизированное измерительное устройство с манипулятором совершает механизмом регулирования крена складывание, датчиком препятствий, установленным на упомянутом механизме регулирования крена, в режиме реального времени определяется наличие или отсутствие в районе складывания упомянутого механизма регулирования крена препятствий или преград, а датчик контроля положения упомянутого механизма регулирования крена в режиме реального времени определяет, убран ли упомянутый механизм регулирования крена до требуемого положения.
Если в области складывания упомянутого механизма регулирования крена нет препятствий, но он не убран до требуемого положения, то продолжает убираться до тех пор, пока не достигнет заданного положения, а если во время складывания упомянутого механизма регулирования крена обнаруживаются препятствия, то его складывание останавливается в экстренном порядке, подается сигнал об аварийном положении механизма регулирования крена при убирании и срабатывает аварийная остановка.
После того, как убран упомянутый механизм регулирования крена, упомянутое роботизированное измерительное устройство с манипулятором убирает механизм выравнивания высоты, датчиком препятствий, установленным на упомянутом механизме выравнивания высоты, в режиме реального времени определяется наличие или отсутствие в районе складывания упомянутого механизма выравнивания высоты препятствий или преград, а датчик контроля положения упомянутого механизма выравнивания высоты в режиме реального времени определяет, убран ли упомянутый механизм выравнивания высоты до требуемого положения.
Если в районе складывания упомянутого механизма выравнивания высоты нет препятствий, но он не убран до требуемого положения, то продолжает убираться до тех пор, пока не достигнет заданного положения, а если во время складывания упомянутого механизма выравнивания высоты обнаруживаются препятствия, то его складывание останавливается в экстренном порядке, подается сигнал об аварийном положении механизма выравнивания высоты и срабатывает аварийная остановка.
После того, как убран упомянутый механизм выравнивания высоты упомянутое роботизированное измерительное устройство с манипулятором переходит в исходное положение холостого хода.
Роботизированное измерительное устройство с манипулятором, предлагаемое настоящим изобретением, пригодно для работы в угольных и других шахтах. С обычным горным тахеометром в качестве измерительного инструмента и возможностью высокоточных измерений с точностью до миллиметра обеспечивается точность позиционирования рабочих поверхностей, вслед за динамикой развития которых роботизированное измерительное устройство с манипулятором, предлагаемое настоящим изобретением, способно в режиме реального времени производить динамические измерения для определения трехмерных геодезических координат целевых точек в данных поверхностях.
Кроме того, роботизированное измерительное устройство с манипулятором оснащено датчиками препятствий и датчиками контроля положения и обладает функцией аварийной защиты, позволяющей обеспечивать безопасность для персонала и оборудования. Роботизированное измерительное устройство с манипулятором, предлагаемое настоящим изобретением, пригодно не только для применения в забоях с угольными пластами средней и большой толщины, но и для использования в добыче угля в тонких и сверхтонких пластах благодаря возможности свободного выдвижения и складывания механических рук, что свидетельствует о его повышенной практичности.
Описание чертежей
Детальное описание оптимального примера реализации изобретения позволит рядовым техническим работникам данной области иметь четкое представление о преимуществах и пользе настоящего изобретения, а иллюстрации служат лишь для ознакомления с целями выбранного примера реализации и не устанавливают ненужных ограничений в отношении самого изобретения. Кроме того, в прилагаемых иллюстрациях одинаковые детали обозначаются одним и тем же символом. Далее приводятся конкретные чертежи:
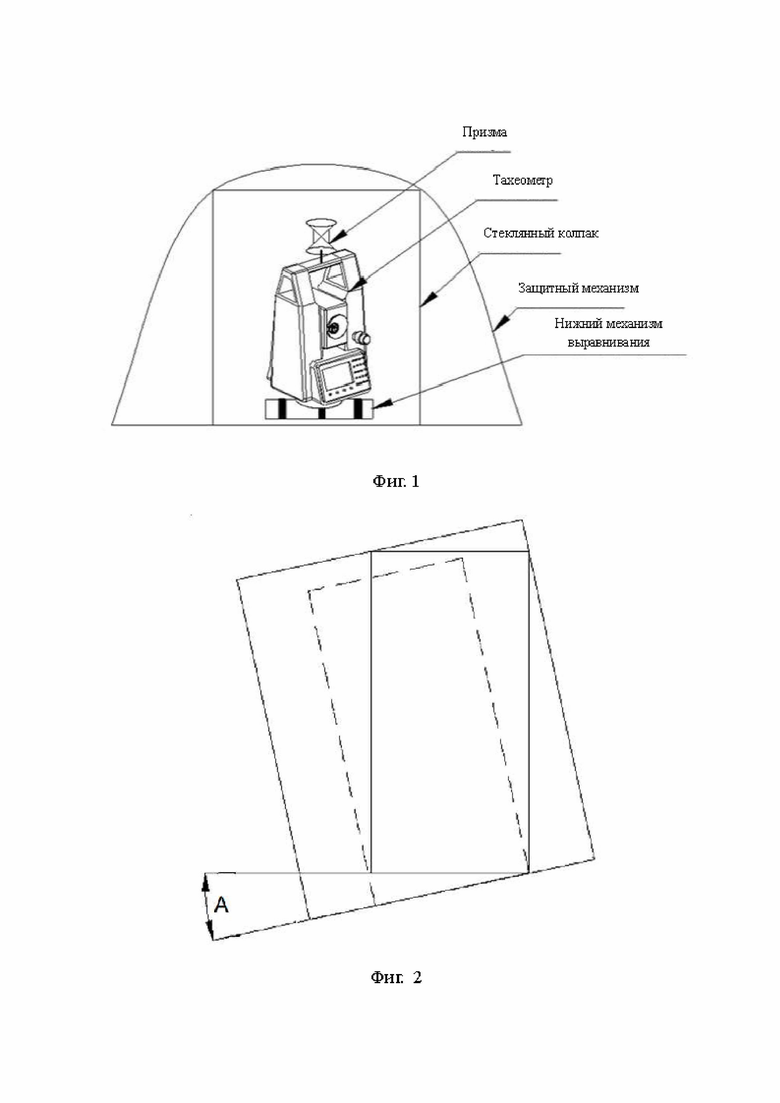
на фиг. 1 приведена схема конструкции роботизированного измерительного устройства с манипулятором, представленного в примере реализации настоящего изобретения;
на фиг. 2 приведена иллюстрация максимального диапазона значений углов тангажа и крена, рассматриваемого в примере реализации настоящего изобретения;
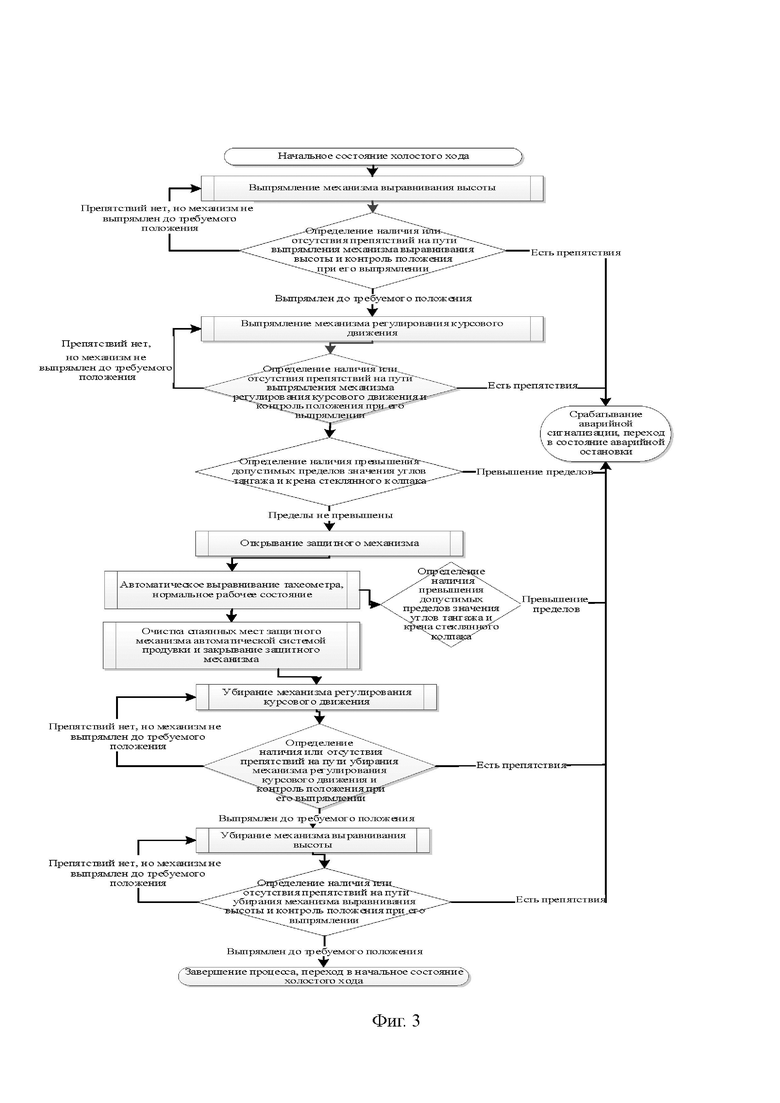
на фиг. 3 приведена схема рабочего процесса на примере выпрямляющих действий механизмов выравнивания высоты и регулирования крена при переходе из исходного положения в рабочее.
Осуществление изобретения
В целях раскрытия сущности вышеперечисленных задач, особенностей и преимуществ настоящего изобретения далее дается их детальное описание в примере реализации изобретения с использованием иллюстраций в виде чертежей. Однако следует понимать, что приведенный ниже пример реализации изобретения является лишь средством представления его сути и охватывает лишь часть, а не всю сферу его применения и не ставит каких-либо ограничений в отношении изобретения.
Роботизированное измерительное устройство с манипулятором, рассматриваемое в примере реализации настоящего изобретения, включает в свою конструкцию: тахеометр с функцией автоматического выравнивания, защитный механизм, механизм выравнивания высоты, механизм регулирования крена, вертикальное поворотное устройство, контроллер, монтажное основание и мобильный терминал, причем тахеометр с функцией автоматического выравнивания составляет основу корпуса роботизированного измерительного устройства с манипулятором.
Тахеометр с функцией автоматического выравнивания включает в себя: непосредственно тахеометр, нижний механизм выравнивания и стеклянный корпус.Кроме того, для более точного определения трехмерных геодезических координат допускается установка в середине верхней части тахеометра обычной или круговой призмы 360 градусов, позволяющей использовать местоположение тахеометра в качестве целевой точки переднего обзора или контрольной точки заднего обзора для остальных тахеометров. На фиг. 1 приведена схема конструкции роботизированного измерительного устройства с манипулятором в которую входят тахеометр, нижний механизм выравнивания, стеклянный корпус, а также один защитный механизм и одна призма.
Согласно примеру реализации настоящего изобретения, тахеометр представляет собой интегральную измерительную платформу, выполняющую функции автоматического поиска цели, автоматического распознавания, автоматического коллимации, автоматического измерения угла и дальности, автоматического отслеживания цели, автоматического расчета и автоматического хранения, такой гироскопический тахеометр может быть двух типов: с гироскопом с ориентацией на север или без него; нижний механизм выравнивания состоит из трех подъемных винтов, он является механизмом автоматического выравнивания, которым оснащается тахеометр, и служит средством нахождения горизонтальной плоскости для тахеометра.
Стеклянный корпус имеет форму прямоугольного параллелепипеда, в который помещаются тахеометр и нижний механизм выравнивания и роль которого заключается в защите тахеометра и механизма выравнивания от воздействия воды и пыли; в стеклянном корпусе установлены датчики углов тангажа и крена (они не указаны на фиг. 1), служащие для точного восприятия углов тангажа и крена стеклянного корпуса.
Стеклянный корпус имеет полностью закрытую структуру, а включение тахеометра возможно только в условиях, когда значения углов тангажа и крена стеклянного корпуса находятся в пределах заданного углового диапазона, а когда значения углов тангажа и крена стеклянного корпуса выходят за пределы заданного углового диапазона, тахеометр, ограничиваемый длиной, шириной и высотой внутренней полости стеклянного корпуса, выходит за пределы выравнивания, и автоматическое выравнивание не представляется возможным.
Если в момент прибытия корпуса роботизированного измерительного устройства в предварительно заданное место значения углов тангажа и крена стеклянного корпуса вышли за пределы заданного диапазона, включение функции автоматического выравнивания тахеометра невозможно, при этом подается сигнальное оповещение о превышении допустимых предельных значений угла тангажа или угла крена стеклянного корпуса.
В то время, как тахеометр функционирует в нормальном рабочем положении, в режиме реального времени ведется мониторинг углов тангажа и крена стеклянного корпуса, если один из них превышает предельные значения, то срабатывает аварийная остановка роботизированного измерительного устройства с манипуляторами подается сигнальное оповещение о превышении предельных значений угла тангажа или угла крена стеклянного корпуса.
Можно понимать, что установленные высота и ширина внутренней полости стеклянного корпуса позволяют тахеометру свободно вращаться на 360 градусов в продольном направлении вокруг продольной оси внутри корпуса и окуляру для наблюдения - свободно вращаться на 360 градусов, более того, с возможностью автоматического выравнивания тахеометр должен свободно вращаться и перемещаться в пределах максимального диапазона углов тангажа и крена. Иллюстрация максимального диапазона значений углов тангажа и крена приведена на фиг. 2, в том числе буквой «А» обозначен максимальный диапазон значений углов тангажа и крена.
Защитный механизм устанавливается снаружи стеклянного корпуса и может иметь форму прямоугольного параллелепипеда,, причем такой защитный механизм может обеспечивать для роботизированного измерительного устройства с манипулятором всестороннюю защиту, предотвращая его от попадания пыли и влаги во время остановки.
Защитный механизм оснащен автоматической системой продувки (она не указана на фиг. 1), перед применением роботизированного измерительного устройства с манипулятором открывается защитный механизм, а после завершения работы роботизированного измерительного устройства с применением автоматической системы продувки проводится очистка мест сопряжения защитного механизма от пыли и посторонних тел, после чего защитный механизм закрывается.
Механизм выравнивания высоты представляет собой манипулятор, которой роботизированное измерительное устройство совершает поступательные движения в продольном направлении; для механизма выравнивания высоты устанавливается угол тангажа, варьирующийся в пределах от -90° до 90° и позволяющий тахеометру, перемещающемуся в продольном направлении, достигать указанного положения, причем угол, рассматриваемый в месте, где тахеометр находится над горизонтальной линией, является углом возвышения с положительным значением (0°~90°, угол 90° означает вертикальное возвышение), а угол, рассматриваемый в месте, где тахеометр находится под горизонтальным углом, является углом понижения с отрицательным значением (-90°~0°, угол -90° означает вертикальное понижение).
Механизм выравнивания высоты оснащен датчиком (детектором) препятствий, предназначенным для обнаружения препятствий, находящихся на пути движения механизма выравнивания высоты, а в случае обнаружения на пути его движения препятствий или преград срабатывает аварийная остановка и издается сигнал тревоги; такой механизм выравнивания высоты также оснащен датчиком контроля положения, используемым для фиксирования положения роботизированного измерительного устройства с механическими руками, когда он, перемещаясь в продольном направлении, достигает заданного места; для механизма выравнивания высоты могут применяться два типа привода: гидравлический и электрический.
Механизм регулирования крена представляет собой манипулятор, которой роботизированное измерительное устройство с манипулятором совершает поступательные движения в направлении курса; такой механизм регулирования крена оснащен датчиком (детектором) препятствий, предназначенным для обнаружения препятствий, находящихся на пути движения механизма регулирования крена, а в случае обнаружения на пути его движения препятствий или преград срабатывает аварийная остановка и издается сигнал тревоги.
Для механизма регулирования крена устанавливается курсовой угол, варьирующийся в пределах от 0° до 360° и обеспечивающий возможность движения тахеометра в направлении заданного курса; такой механизм регулирования крена также оснащен датчиком контроля положения, используемым для фиксирования положения упомянутого роботизированного измерительного устройства с манипулятором, когда он, перемещаясь в направлении курса, достигает заданного места; для механизма регулирования крена могут применяться два типа привода: гидравлический и электрический.
Вертикальное поворотное устройство представляет собой приводное устройство, обеспечивающее вращение роботизированного измерительного устройства с манипулятором вокруг центральной вертикальной оси и предназначенное для точного контроля крена роботизированного измерительного устройства с манипулятором, например, точный контроль крена тахеометра с помощью шагового двигателя и поддержание данного параметра в некотором заданном значении с применением двигателя рулевого управления.
В контроллере установлена программа управления роботизированного измерительного устройства с манипулятором, которая с учетом предварительно заданного угла тангажа, протяженности движений в продольном направлении, крена и протяженности движений тахеометра в направлении курса перемещает тахеометр в заданное место и в автоматическом режиме управляет всем процессом функционирования роботизированного измерительного устройства с манипулятором.
Монтажное основание предназначено для фиксирования положения роботизированного измерительного устройства с манипулятором, причем такое монтажное основание подходит для любого места установки или оборудования, в том числе может быть установлено: на опорном цилиндровом механизме в гидравлических крепях, между двумя вертикальными колоннами гидравлических крепей, в кабельном канале и на другом оборудовании в комплексно-механизированных очистных забоях, а также на кровле отсека центрального управления, в хвостовом отделе проходческого комбайна и на другом оборудовании в проходческих забоях.
С помощью мобильного терминала осуществляется мониторинг рабочего положения и предупреждающих сообщений по меньшей мере одного роботизированного измерительного устройства с манипулятором в реальном времени и отправляются управляющие команды в контроллер для управления роботизированного измерительного устройства с манипулятором путем человеко-машинного взаимодействия.
Согласно примеру реализации настоящего изобретения, датчики препятствий, которыми оснащаются механизм выравнивания высоты и механизм регулирования крена, отвечают за обнаружения в реальном времени препятствий или преград, появляющихся на пути движения механизмов, в которых установлен каждый из них, с тем, чтобы своевременно вмешаться и подать сигнал аварийной остановки для защиты роботизированного измерительного устройства с манипулятором, предотвращая сдавливание и столкновения, приводящие к поломке оборудования или травмированию персонала.
В том числе датчик препятствий включает в себя: датчик давления и бесконтактный датчик приближения; датчики давления в механизме выравнивания высоты и механизме регулирования крена в случае существенных перепадов давления или превышения предельного значения давления в данных механизмах подают сигнал аварийной остановки для защиты роботизированного измерительного устройства с манипулятором, при этом механизмы, в которых установлены эти датчики, прекращают поступательные движения и подается сигнальное оповещение о наличии сопротивления на пути их движения, и таким образом предотвращается поломка тахеометра и оборудования в целом или травмирование персонала.
Бесконтактные датчики приближения в механизме выравнивания высоты и механизме регулирования крена позволяют в случае присутствия поблизости человека или оборудования своевременно подавать сигнал аварийной остановки и включать светозвуковую сигнализацию для защиты роботизированного измерительного устройства с манипулятором, при этом механизмы, в которых установлены эти датчики, прекращают поступательные движения и подается сигнальное оповещение о приближении человека или оборудования, чтобы избежать столкновения роботизированного измерительного устройства с манипулятором с человеком или оборудованием; в том числе для бесконтактного датчика приближения могут применяться следующие технологии: инфракрасная фотокамера, ультразвуковые волны, AI-видео, UWB-передатчик, лазерный дальномер и лазерный радар.
Поскольку масса тахеометра влияет на функционирование механизмов выравнивания высоты и регулирования крена и в случае использования одного механизма выравнивания высоты и одного механизма регулирования крена может наблюдаться вращение тахеометра вокруг продольной оси, то, если использовать один механизм выравнивания высоты и один механизм регулирования крена, их несущая способность должна отвечать требованиям и позволять избежать вращения тахеометра вокруг оси, в противном случае следует использовать по меньшей мере два синхронизированных механизма выравнивания высоты и два механизма регулирования крена, которые должны предотвращать перевес и вращение тахеометра вокруг продольной оси.
Вся конструкция роботизированного измерительного устройства с манипулятором может пребывать в одном из трех положений: в начальном положении холостого хода, рабочем положении и положении аварийной остановки; под начальным положением холостого хода подразумевается положение, когда тахеометр не работает; под рабочим положением подразумевается положение, когда тахеометр находится в заданном рабочем месте и функционирует в штатном режиме; под положением аварийной остановки подразумевается положение, когда на пути телескопических движений механизма выравнивания высоты или механизма регулирования крена встретились препятствия или преграды и требуется вмешательство человека, чтобы устранить неполадки; при этом, начав функционировать, роботизированное измерительное устройство с манипулятором переходит из исходного положения холостого хода в рабочее положение, а завершив работу, из рабочего положения снова переходит в исходное положение холостого хода.
На практике поступательные движения роботизированного измерительного устройства с манипулятором начинаются с того, что робот с учетом предварительно заданных угла тангажа и крена начинает двигаться в начальной точке и совершает данные движения с помощью механизмов выравнивания высоты и регулирования крена, имеющих множество степеней свободы, перемещая таким образом тахеометр в установленное рабочее место; после того, как автоматическое выравнивание выполнено и измерительные работы с применением тахеометра завершены, роботизированное измерительное устройство с манипулятором начинает выходить из рабочего места и в обратном порядке и направлении совершает поступательные движения с помощью механизмов выравнивания высоты и регулирования крена, имеющих множество степеней свободы, перемещая таким образом тахеометр в начальную точку. Рассмотрим следующий конкретный пример:
Роботизированное измерительное устройство с манипулятором может совершать поступательные движения в продольном направлении и направлении курса с учетом предварительно заданных угла тангажа и крена в следующих двух последовательностях: сначала в продольном направлении, затем в направлении курса, либо сначала в направлении курса, затем в продольном направлении;
Если при переходе из исходного положения холостого хода в рабочее положение поступательные движения выполняются сначала механизмом выравнивания высоты в продольном направлении, а затем механизмом регулирования крена в направлении курса, то при обратном переходе из рабочего положения в исходное положение холостого хода поступательные движения выполняются сначала механизмом регулирования крена в направлении курса, а затем упомянутым механизмом выравнивания высоты в продольном направлении, таким образом обеспечивается проходимость траектории движения и проходимость тахеометра.
Отсюда следует, что, если при переходе из исходного положения холостого хода в рабочее положение поступательные движения выполняются сначала механизмом регулирования крена в направлении курса, а затем механизмом выравнивания высоты в продольном направлении, то при обратном переходе из рабочего положения в исходное положение холостого хода поступательные движения выполняются сначала механизмом выравнивания высоты в продольном направлении, а затем механизмом регулирования крена в направлении курса, таким образом обеспечивается проходимость траектории движения и проходимость тахеометра.
Если в момент прибытия корпуса роботизированного измерительного устройства с манипулятором в предварительно заданное место значения углов тангажа и крена стеклянного корпуса вышли за пределы заданного диапазона, включение функции автоматического выравнивания тахеометра невозможно, при этом подается сигнальное оповещение о превышении допустимых предельных значений углов тангажа и крена стеклянного корпуса. Такое происходит потому, что включение тахеометра возможно только в условиях, когда значения углов тангажа и крена стеклянного корпуса находятся в пределах заданного углового диапазона, а когда они выходят за пределы заданного углового диапазона, тахеометр, ограничиваемый длиной, шириной и высотой внутренней полости стеклянного корпуса, выходит за пределы выравнивания, и автоматическое выравнивание не представляется возможным.
В то время как тахеометр функционирует в нормальном рабочем положении, в режиме реального времени ведется мониторинг углов тангажа и крена стеклянного корпуса, если они превышают предельные значения, то срабатывает аварийная остановка для защиты измерительного робота с механическими руками и подается сигнальное оповещение о превышении предельных значений угла тангажа или угла крена стеклянного корпуса.
Управление вышеописанным роботизированным измерительным устройством с манипулятором осуществляется контроллером посредством управляющей программы. На фиг. 3 приведена схема рабочего процесса, рассматриваемого на примере телескопических действий механизмов, совершаемых сначала механизмом выравнивания высоты упомянутого устройства, а затем - его механизмом регулирования крена, в том числе:
При запуске роботизированного измерительного устройства с манипулятором, когда он находится в начальном положении холостого хода, механизмом выравнивания высоты совершается выпрямляющее действие, датчиком препятствий, установленным на механизме выравнивания высоты, в режиме реального времени определяется наличие или отсутствие в районе выдвижения механизма выравнивания высоты препятствий или преград, а датчик контроля положения механизма выравнивания высоты в режиме реального времени определяет, выдвинут ли механизм выравнивания высоты до требуемого положения.
Если в районе выдвижения упомянутого механизма выравнивания высоты нет препятствий, но он не выдвинут до требуемого положения, то продолжает выдвигаться до тех пор, пока не достигнет заданного положения, а если во время выдвижения механизма выравнивания высоты обнаруживаются препятствия, то его выпрямляющее действие останавливается в экстренном порядке, подается сигнал об аварийном положении механизма выравнивания высоты при выдвижении и срабатывает аварийная остановка.
После того, как выдвинут механизм выравнивания высоты, роботизированное измерительное устройство с манипулятором выпрямляет механизм регулирования крена, датчиком препятствий, установленным на механизме регулирования крена, в режиме реального времени определяется наличие или отсутствие в районе выдвижения механизма регулирования крена препятствий или преград, а датчик контроля положения механизма регулирования крена в режиме реального времени определяет, выдвинут ли механизм регулирования крена до требуемого положения.
Если в районе выдвижения механизма регулирования крена нет препятствий, но он не выдвинут до требуемого положения, то продолжает выдвигаться до тех пор, пока не достигнет заданного положения, а если во время выдвижения механизма регулирования крена обнаруживаются препятствия, то его выпрямляющее действие останавливается в экстренном порядке, подается сигнал об аварийном положении механизма регулирования крена при выдвижении и срабатывает аварийная остановка.
После того, как выдвинут механизм регулирования крена, определяется, не превышают ли предельные значения углы тангажа и крена стеклянного корпуса; если превышают, то срабатывает аварийная остановка для защиты роботизированного измерительного устройства с манипуляторами подается сигнальное оповещение о превышении предельных значений угла тангажа или угла крена стеклянного корпуса, а если не превышают, то открывается защитный механизм.
После открывания упомянутого защитного механизма тахеометр автоматически выравнивается и переходит в нормальное рабочее положение; во время функционирования тахеометра в нормальном рабочем положении в режиме реального времени роботизированное измерительное устройство с манипулятором посредством датчиков углов тангажа и крена в стеклянном корпусе определяет, не превышают ли предельные значения углы тангажа и крена данного стеклянного корпуса; если превышают, то срабатывает аварийная остановка для защиты роботизированного измерительного устройства с манипуляторами подается сигнальное оповещение о превышении предельных значений угла тангажа или угла крена упомянутого стеклянного корпуса, а если не превышают, то работа продолжается в штатном режиме.
После завершения работы тахеометра с применением автоматической системы продувки проводится очистка мест сопряжения защитного механизма, после чего защитный механизм закрывается.
После закрытия защитного механизма роботизированное измерительное устройство с манипулятором совершает механизмом регулирования крена складывание, датчиком препятствий, установленным на механизме регулирования крена, в режиме реального времени определяется наличие или отсутствие в районе складывания механизма регулирования крена препятствий или преград, а датчик контроля положения механизма регулирования крена в режиме реального времени определяет, убран ли механизм регулирования крена до требуемого положения.
Если в районе складывания механизма регулирования крена нет препятствий, но он не убран до требуемого положения, то продолжает убираться до тех пор, пока не достигнет заданного положения, а если во время складывания механизма регулирования крена обнаруживаются препятствия, то его складывание останавливается в экстренном порядке, подается сигнал об аварийном положении механизма регулирования крена при убирании и срабатывает аварийная остановка.
После того, как убран упомянутый механизм регулирования крена, роботизированное измерительное устройство с манипулятором убирает механизм выравнивания высоты, датчиком препятствий, установленным на механизме выравнивания высоты, в режиме реального времени определяется наличие или отсутствие в районе складывания механизма выравнивания высоты препятствий или преград, а датчик контроля положения механизма выравнивания высоты в режиме реального времени определяет, убран ли механизм выравнивания высоты до требуемого положения.
Если в районе складывания механизма выравнивания высоты нет препятствий, но он не убран до требуемого положения, то продолжает убираться до тех пор, пока не достигнет заданного положения, а если во время складывания механизма выравнивания высоты обнаруживаются препятствия, то его складывание останавливается в экстренном порядке, подается сигнал об аварийном положении механизма выравнивания высоты при убирании и срабатывает аварийная остановка.
После того, как убран механизм выравнивания высоты роботизированное измерительное устройство с манипулятором переходит в исходное положение холостого хода и на этом завершается весь рабочий процесс.
Последовательности и комбинации действий выдвижения и складывания механизмов выравнивания высоты и регулирования крена при переходе из исходного положения холостого хода и при обратном переходе из рабочего положения в исходное положение холостого хода приведены в нижеследующей таблице:
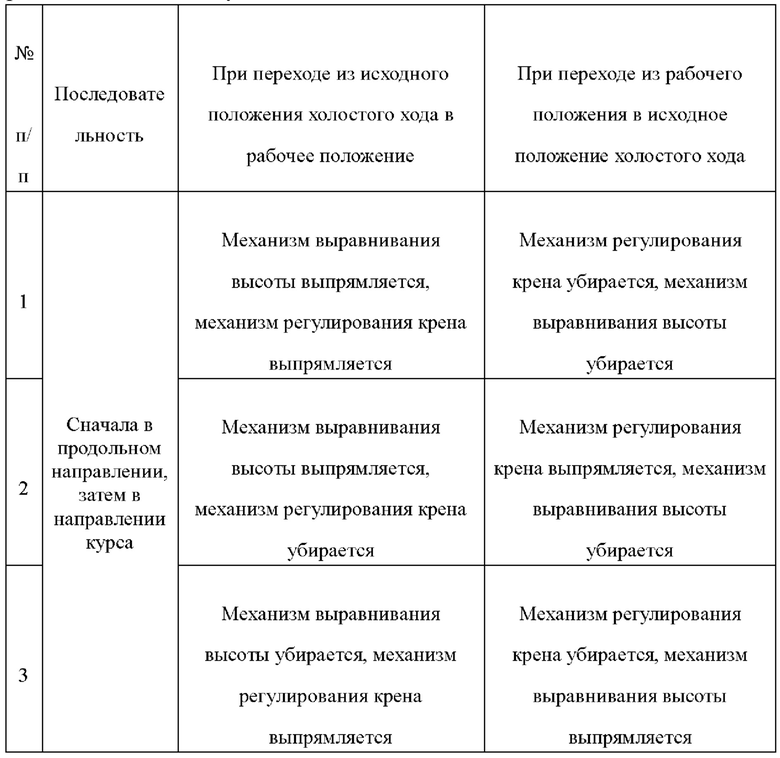
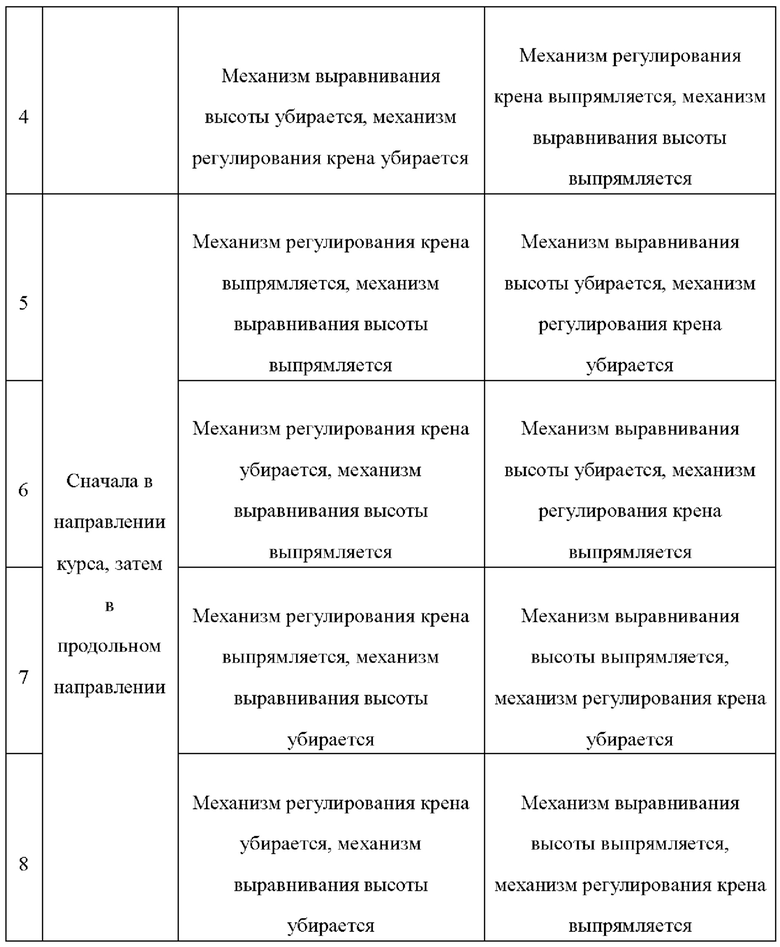
Роботизированное измерительное устройство с манипулятором совершает поступательные движения в продольном направлении и направлении курса с учетом предварительно заданных угла тангажа и крена, имея множество степеней свободы; если при переходе из исходного положения холостого хода в рабочее положение механизмом выравнивания высоты или механизмом регулирования крена выполняется действие выдвижения, то при обратном переходе из рабочего положения в исходное положение холостого хода механизмом регулирования крена или механизмом выравнивания высоты выполняется складывание, чтобы таким образом была обеспечена проходимость траектории движения и проходимость тахеометра.
Если при переходе из исходного положения холостого хода в рабочее положение механизмом выравнивания высоты или механизмом регулирования крена выполняется складывание, то при обратном переходе из рабочего положения в исходное положение холостого хода механизмом регулирования крена или механизмом выравнивания высоты выполняется действие выдвижения, чтобы таким образом была обеспечена проходимость траектории движения и проходимость тахеометра. Из вышеприведенной таблицы видно, что в любом случае, если один из механизмов (выравнивания высоты или регулирования крена) при переходе из исходного положения холостого хода в рабочее положение выполняет сначала выпрямляющее действие, то при обратном переходе из рабочего положения в исходное положение холостого хода данный механизм убирается после того, как выдвинут или убран другой механизм; если же один из механизмов (выравнивания высоты или регулирования крена) при переходе из исходного положения холостого хода в рабочее положение выполняет сначала складывание, то при обратном переходе из рабочего положения в исходное положение холостого хода данный механизм выпрямляется после того, как выдвинут или убран другой механизм.
Обобщая вышеописанные особенности конструкции и способ применения роботизированного измерительного устройства с манипулятором, можно сделать вывод о том, что роботизированное измерительное устройство с манипулятором, предлагаемое настоящим изобретением, пригодно для работы как в угольных, так и в других шахтах.
Исходя из вышеизложенного, в предлагаемом настоящим изобретении роботизированном измерительном устройстве с манипулятором в качестве измерительного инструмента используется обычный горный тахеометр, который благодаря возможности высокоточных измерений с точностью до миллиметра обеспечивает точность позиционирования рабочих поверхностей, а вслед за динамикой развития таких поверхностей роботизированное измерительное устройство с манипулятором, предлагаемое настоящим изобретением, способно в режиме реального времени производить динамические измерения для определения трехмерных геодезических координат целевых точек в данных поверхностях.
Кроме того, роботизированное измерительное устройство с манипулятором оснащено датчиками препятствий и датчиками контроля положения и обладает функцией аварийной защиты, позволяющей обеспечивать безопасность для персонала и оборудования. Роботизированное измерительное устройство с манипулятором, предлагаемое настоящим изобретением, пригодно не только для применения в забоях с угольными пластами средней и большой толщины, но и для использования в добыче угля в тонких и сверхтонких пластах благодаря возможности свободного выдвижения и складывания механических рук, что свидетельствует о его повышенной практичности.
Несмотря на то, что в изложенном выше примере реализации дано детальное описание настоящего изобретения, рядовые технические специалисты данной области могут на основе приведенной созидательной концепции вносить в данный пример изменения и поправки, поэтому прилагаемая формула изобретения подразумевает включение оптимального примера осуществления настоящего изобретения и всех изменений и поправок, вносимых в примеры его осуществления.
Напоследок следует отметить, что выражения «во-первых», «во-вторых» и т.д., встречаемые в тексте настоящей заявки, приводятся лишь для различения одного объекта или действия от другого объекта или действия и вовсе не означаются или указывают на какую-либо последовательность или связь между данными объектами или действиями. Выражения «состоять из…», «содержать в себе…» и другие их разновидности не исключают возможности существования иных компонентов, то есть процессы, способы, объекты или оконечные устройства, содержащие в себе ряд компонентов, содержат не только данные компоненты, но и другие не приведенные компоненты или компоненты, изначально присущие таким процессам, способам, объектам или оконечным устройствам. При отсутствии иных ограничений выражение «состоять из одного…», или «содержать в себе один…», якобы указывающее на ограниченное количество компонентов, не исключает возможности существования в том или ином процессе, способе, объекте или оконечном устройстве иного подобного компонента, отличного от вышеупомянутого.
Выше приведено иллюстрированное описание примера реализации настоящего изобретения, однако способы применения настоящего изобретения не ограничиваются вышеприведенным конкретным примером, который является лишь средством наглядности и вовсе не ставит каких-либо ограничений в отношении изобретения. Рядовые технические специалисты данной области могут, не нарушая основной идеи изобретения и формулы изобретения, создавать множество вариантов его осуществления которые подлежат охране в рамках настоящего изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАТУРНЫХ ИСПЫТАНИЙ БЕЗЭКИПАЖНЫХ СУДОВ | 2020 |
|
RU2751725C1 |
| СИСТЕМА ПОДВОДНАЯ РАЗВЕДЫВАТЕЛЬНО-УДАРНАЯ ТРАНСФОРМИРУЕМАЯ | 2019 |
|
RU2725567C1 |
| СИСТЕМА ВИЗУАЛИЗАЦИИ ПОЛЕТА И КОГНИТИВНЫЙ ПИЛОТАЖНЫЙ ИНДИКАТОР ОДНОВИНТОВОГО ВЕРТОЛЕТА | 2012 |
|
RU2497175C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОЛЕТОМ САМОЛЕТА | 2006 |
|
RU2312793C1 |
| РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС РАЗВЕДКИ И ОГНЕВОЙ ПОДДЕРЖКИ | 2013 |
|
RU2548207C1 |
| Малогабаритный телеуправляемый подводный аппарат | 2021 |
|
RU2775894C1 |
| Способ посадки орбитального самолета без колесного шасси с помощью экраноплана и устройство для его реализации | 2022 |
|
RU2795630C1 |
| НАДВОДНО-ПОДВОДНЫЙ КОРАБЛЬ С ПАЛУБНЫМ АВИАЦИОННЫМ УДАРНЫМ КОМПЛЕКСОМ | 2019 |
|
RU2721808C1 |
| Способ полунатурных роботизированных исследований и испытаний систем управления беспилотных воздушных судов вертикального взлета и посадки (БВС ВВП) | 2021 |
|
RU2771692C1 |
| БЕСПИЛОТНЫЙ СКОРОСТНОЙ ВЕРТОЛЕТ, ДЕСАНТИРУЕМЫЙ С САМОЛЕТА-НОСИТЕЛЯ | 2016 |
|
RU2627975C2 |
Изобретение относится к области робототехники и может быть использовано как роботизированное измерительное устройство при добыче угля. Устройство имеет тахеометр с функцией автоматического выравнивания, манипулятор, защитный механизм, механизм выравнивания высоты, механизм регулирования крена, вертикальное поворотное устройство, контроллер, монтажное основание и мобильный терминал. Устройство начинает свою работу с учетом предварительно заданных углов тангажа и крена посредством перемещения в начальную точку и совершает поступательные движения с помощью механизмов выравнивания высоты и регулирования крена для перемещения тахеометра в заданное рабочее место. После того как автоматическое выравнивание выполнено и движение завершено, устройство в обратном порядке и направлении совершает поступательные движения с помощью механизма выравнивания высоты и механизма регулирования крена, перемещая тахеометр в начальную точку. Устройство способно устранять сложности, связанные с ограниченной высотой и пространством рабочих поверхностей, и поэтому пригодно для применения в забоях с угольными пластами малой, сверхмалой, средней и большой толщины. Использование изобретения расширяет технологические возможности устройства. 3 з.п. ф-лы, 3 ил., 1 табл.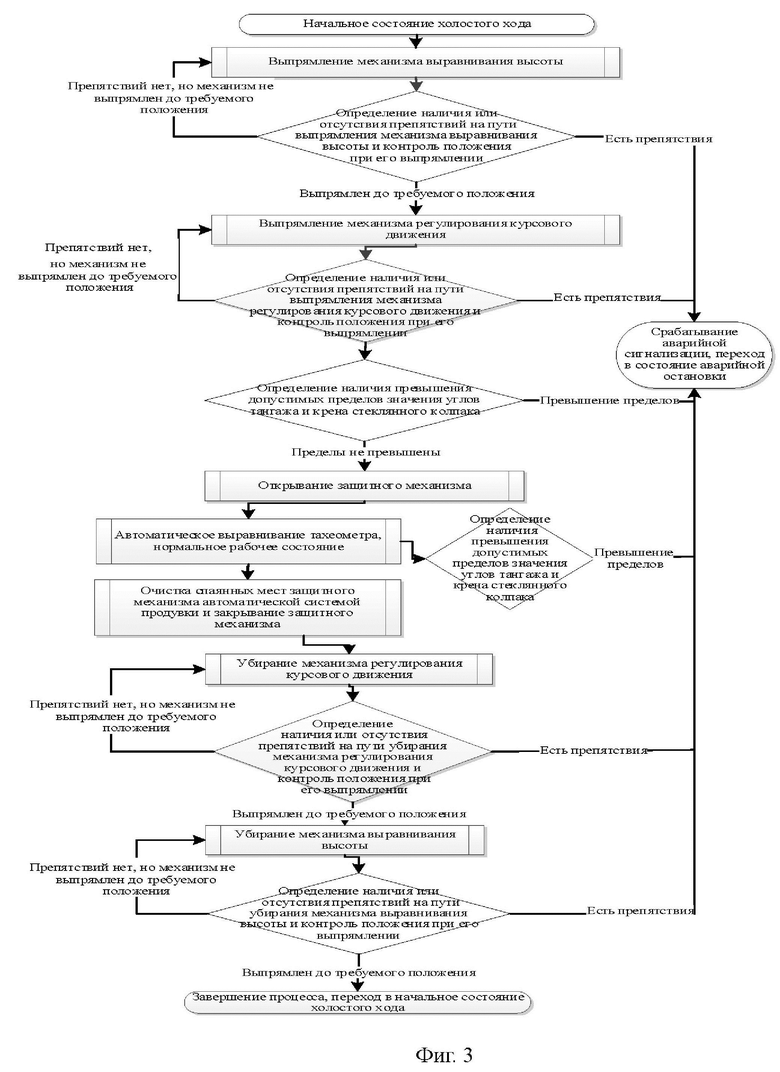
1. Роботизированное измерительное устройство для измерения геодезических координат в шахтных забоях, включающее тахеометр с функцией автоматического выравнивания, защитный механизм, механизм выравнивания высоты, механизм регулирования крена, вертикальное поворотное устройство, контроллер, монтажное основание и мобильный терминал, при этом упомянутый тахеометр выполнен в виде интегральной измерительной платформы с функциями автоматического поиска цели, автоматического распознавания, автоматической коллимации, автоматического измерения угла и дальности, автоматического отслеживания цели, автоматического расчета и автоматического хранения и содержит нижний механизм выравнивания, стеклянный корпус и непосредственно тахеометр с включением в него гироскопа с ориентацией на север или без такого гироскопа, упомянутый нижний механизм выравнивания состоит из трех подъемных винтов и выполнен с возможностью автоматического выравнивания и нахождения горизонтальной плоскости для упомянутого тахеометра, а упомянутый стеклянный корпус выполнен в форме прямоугольного параллелепипеда, в котором расположены упомянутый тахеометр и упомянутый нижний механизм выравнивания, с обеспечением защиты тахеометра и механизма выравнивания от воздействия воды и пыли, причем в упомянутом стеклянном корпусе установлены датчики углов тангажа и крена, с возможностью точного определения углов тангажа и крена стеклянного корпуса, а упомянутый защитный механизм установлен снаружи стеклянного корпуса с возможностью открытия перед применением упомянутого устройства и закрытия после завершения его работы и выполнен в форме прямоугольного параллелепипеда с обеспечением всесторонней защиты от попадания пыли и влаги во время остановки устройства, при этом он оснащен автоматической системой продувки, выполненной с возможностью очистки мест сопряжения защитного механизма от пыли и посторонних тел, упомянутый механизм выравнивания высоты выполнен в виде манипулятора, посредством которого упомянутое измерительное устройство имеет возможность совершать поступательные движения в продольном направлении, и установлен с возможностью изменения угла тангажа в пределах от -90° до 90° с обеспечением перемещения тахеометра в продольном направлении с достижением заданного положения, причем угол, рассматриваемый в положении, где тахеометр находится над горизонтальной линией, является углом вертикального возвышения с положительным значением 0°-90°, а угол, рассматриваемый в положении, где тахеометр находится под горизонтальной линией, является углом вертикального понижения с отрицательным значением -90°-0°, при этом упомянутый механизм выравнивания высоты оснащен:
- датчиком препятствий с возможностью обнаружения препятствий или преград, находящихся на пути движения эго механизма, и осуществления при этом аварийной остановки и формирования сигнала тревоги,
- датчиком контроля положения с возможностью фиксирования положения упомянутого устройства при достижении им заданного места после перемещения в продольном направлении, и
- приводом, выполненным в виде гидравлического или электрического привода, причем упомянутый механизм регулирования крена выполнен в виде манипулятора, посредством которого упомянутое измерительное устройство имеет возможность совершать поступательные движения в направлении курса, и установлен с возможностью изменения курсового угла в пределах от 0° до 360° с обеспечением перемещения тахеометра в направлении заданного курса с достижением заданного положения, при этом упомянутый механизм регулирования крена оснащен:
- датчиком препятствий, имеющим возможность обнаружения препятствий или преград, находящихся на пути движения механизма регулирования крена, с возможностью осуществления при этом аварийной остановки и формирования сигнала тревоги,
- датчиком контроля положения с возможностью фиксирования положения упомянутого устройства при достижении им заданного места после перемещения в направлении курса, и
- приводом, выполненным в виде гидравлического или электрического привода, причем упомянутое вертикальное поворотное устройство выполнено в виде приводного устройства, имеющего возможность вращения упомянутого измерительного устройства вокруг центральной вертикальной оси с точным контролем крена упомянутого измерительного устройства,
- упомянутый контроллер содержит программу управления упомянутым измерительным устройством, выполненную с возможностью с учетом предварительно заданных угла тангажа, длительности движений упомянутого тахеометра в продольном направлении, крена и длительности движений в направлении курса перемещения упомянутого тахеометра в заданное место и управления в автоматическом режиме всем процессом функционирования упомянутого измерительного устройства, а
упомянутое монтажное основание выполнено с возможностью фиксирования положения упомянутого измерительного устройства в заданном месте установки или на заданном оборудовании в комплексно-механизированных очистных забоях,
при этом упомянутый мобильный терминал выполнен с возможностью осуществления мониторинга рабочего положения и формирования предупреждающих сообщений по меньшей мере одного упомянутого измерительного устройства в реальном времени, а также отправления управляющих команд в упомянутый контроллер для управления упомянутым измерительным устройством посредством взаимодействия человек - машина.
2. Устройство по п. 1, отличающееся тем, что датчики препятствий, установленные в упомянутых механизме выравнивания высоты и механизме регулирования крена, выполнены с возможностью обнаружения в реальном времени препятствий или преград, появляющихся на пути движения соответствующих механизмов, и своевременной подачи сигнала аварийной остановки упомянутого измерительного устройства с предотвращением сдавливания и столкновения, приводящих к поломке оборудования или травмированию персонала, при этом каждый из упомянутых датчиков препятствий включает в себя датчик давления и бесконтактный датчик приближения, упомянутые датчики давления выполнены с возможностью своевременной подачи сигнала аварийной остановки упомянутого измерительного устройства в случае превышения предельного значения давления с прекращением поступательных движений соответствующих механизмов и подачей сигнального оповещения о наличии сопротивления на пути их движения с предотвращением поломки упомянутого тахеометра и оборудования в целом или травмирования персонала, а упомянутые бесконтактные датчики приближения выполнены с возможностью своевременной подачи сигнала аварийной остановки и включения светозвуковой сигнализации в случае присутствия поблизости человека или оборудования для защиты упомянутого измерительного устройства с прекращением поступательных движений и подачей сигнального оповещения о приближении человека или оборудования во избежание столкновения упомянутого измерительного устройства с человеком или оборудованием, при этом в состав упомянутого бесконтактного датчика приближения входят инфракрасная фотокамера, ультразвуковые излучатели, AI-видео, UWB-передатчик, лазерный дальномер и лазерный радар.
3. Устройство по п. 1, отличающееся тем, что упомянутый стеклянный корпус выполнен с высотой и шириной внутренней полости, обеспечивающими возможность свободного вращения на 360° упомянутого тахеометра в продольном направлении вокруг продольной оси внутри корпуса и окуляра для наблюдения, а также свободного вращения и перемещения упомянутого тахеометра в пределах максимального диапазона углов тангажа и крена с возможностью автоматического выравнивания, при этом в середине верхней части упомянутого тахеометра установлена обычная или круговая призма на 360°.
4. Устройство по п. 1, отличающееся тем, что монтажное основание выполнено с возможностью установки на опорном цилиндровом механизме в гидравлических крепях, между двумя вертикальными колоннами гидравлических крепей, в кабельном канале, а также на оборудовании в проходческих забоях, в том числе на кровле отсека центрального управления, в хвостовом отделе проходческого комбайна.
| US 2019041207 A1, 07.02.2019 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ АБСОЛЮТНОГО ПОЛОЖЕНИЯ УГЛЕДОБЫВАЮЩЕЙ МАШИНЫ | 2018 |
|
RU2711418C1 |
| УСТРОЙСТВО ДЛЯ ОРИЕНТИРОВАНИЯ ПОДЗЕМНЫХ ГОРНЫХ ВЫРАБОТОК | 2017 |
|
RU2662468C1 |
| US 2022221276 A1, 14.07.2022 | |||
| WO 2014139004 A1, 18.09.2014 | |||
| CN 110470283 A, 19.11.2019. | |||

