Изобретение относится к транспортным роботам-укладчикам ящиков на поддоны и может найти применение во всех отраслях промышленности, где применяются ящики.
Цель изобретения - улучшение эксплуатационных характеристик.
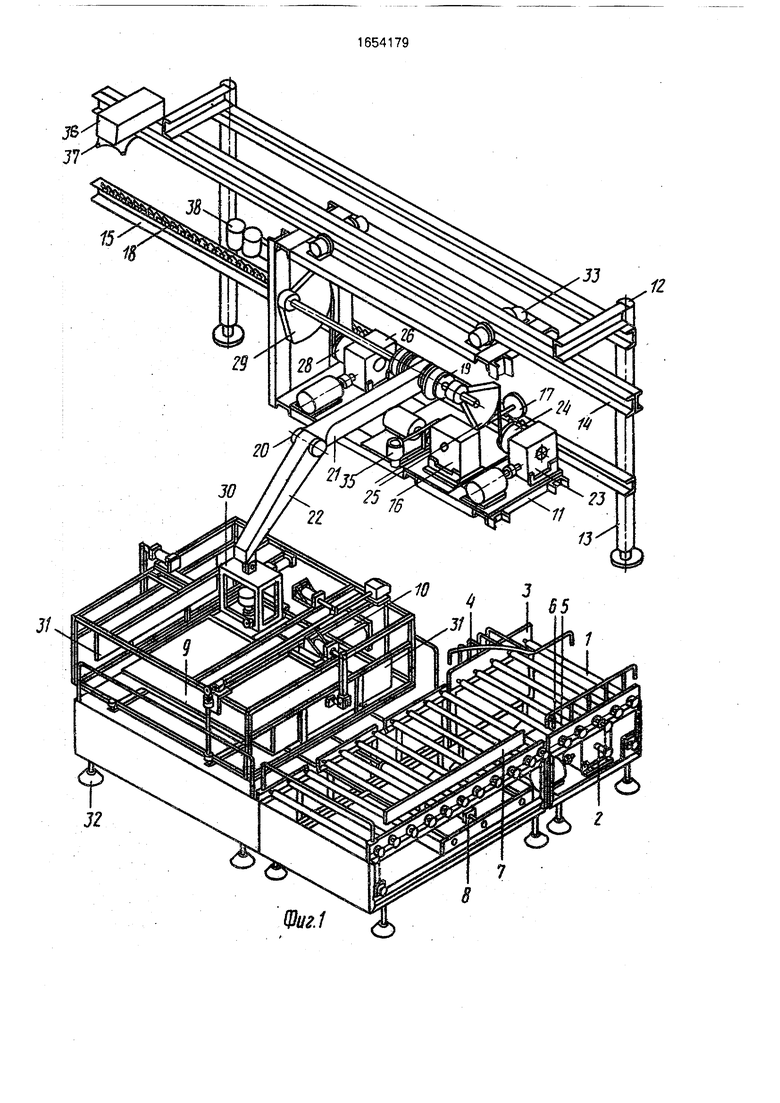
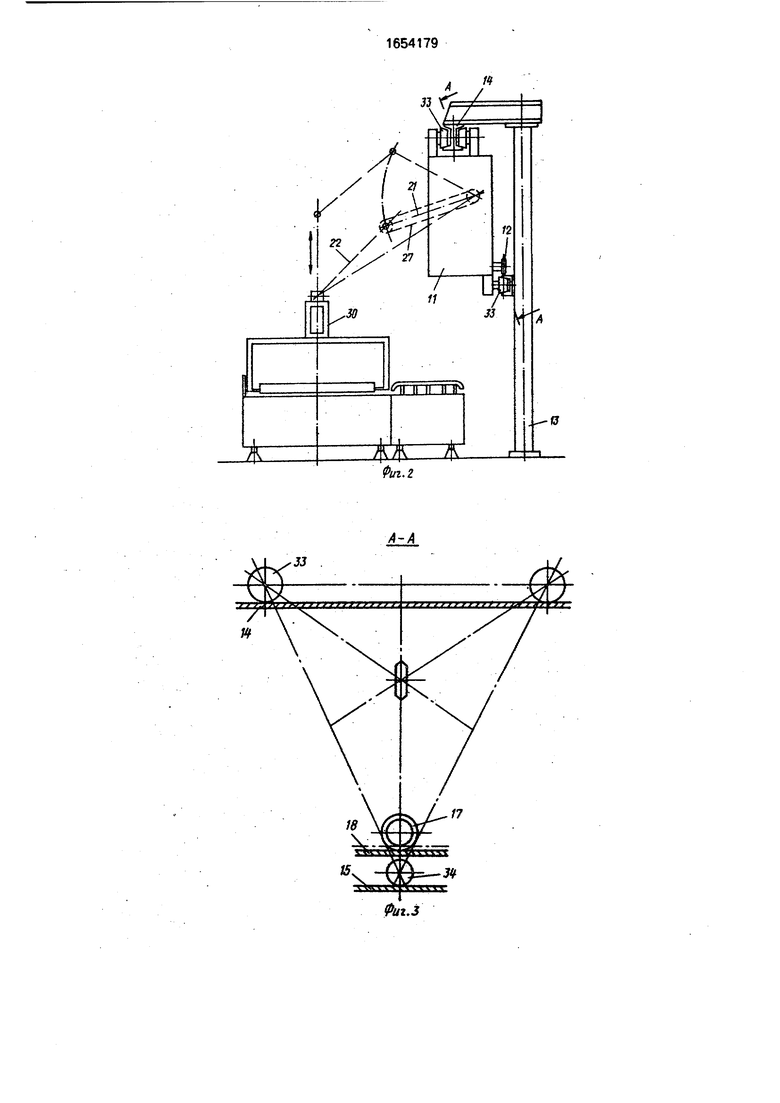
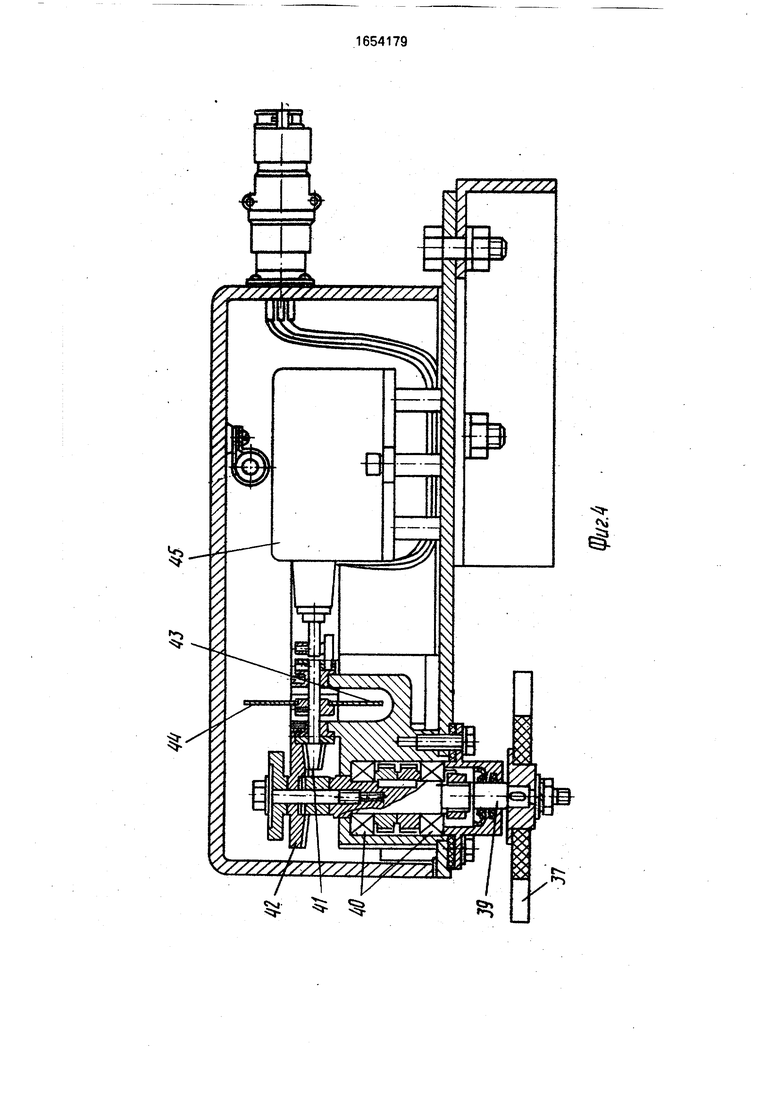
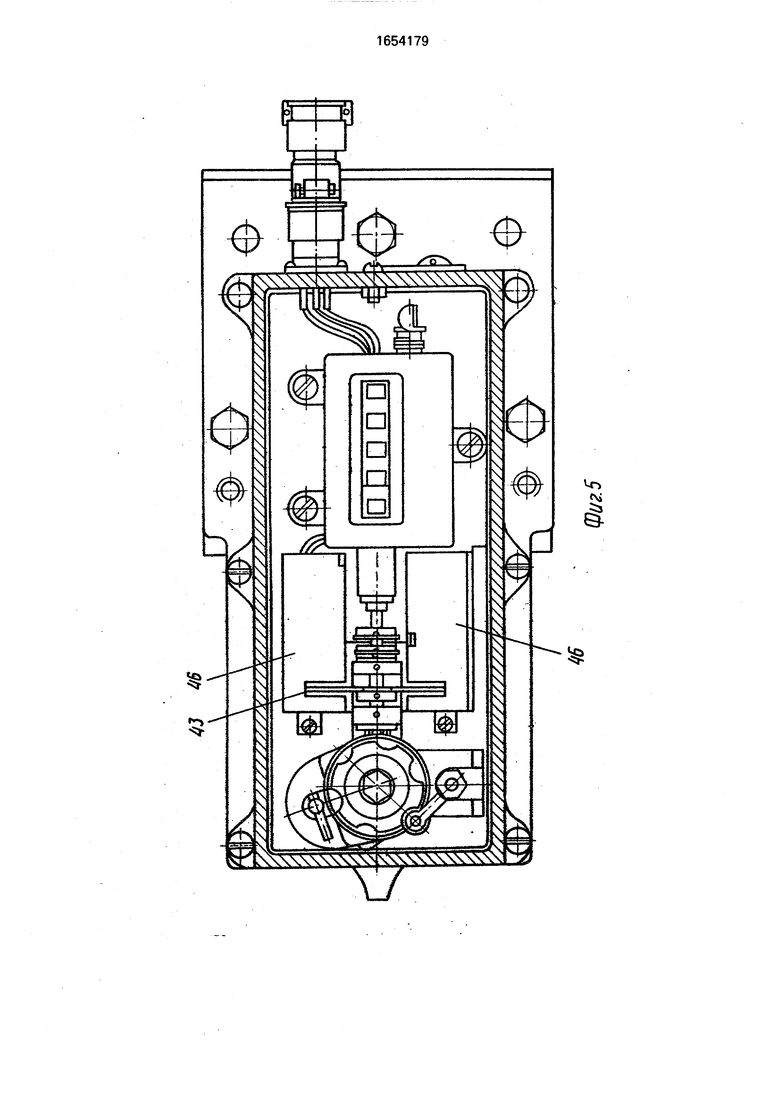
На фиг. 1 изображено устройство, изо- метрия; на фиг. 2 - манипулятор, боковая проекция; на фиг. 3 - схема трехосной опоры манипулятора (разрез А-А на фиг. 2); на фиг. 4 и 5 - блок формирования команд на останов привода каретки, разрезы.
Устройство содержит подающий конвейер 1 с приводом от мотор-редуктора 2, механизм 3 формирования слоя изделий, включающий в себя фигурное ограждение 4,
пневмоцилиндр 5 со штоком 6, сталкиватеяь 7 с механическим усилителем хода на пнев- моцилиндре 8, сборочный стол 9 с пневмо- цилиндром 10 подъема стола. В устройство также входит каретка 11, установленная на станине 12, включающей вертикальные стойки 13 и несущую 14 и опорную 15 балки. Каретка снабжена приводом 16, на выходном валу которого закреплена звездочка 17, взаимодействующая с развернутой и закрепленной на опорной балке 15 цепью 18. На каретке 11 консольно на оси 19 закреплен манипулятор 20, включающий в себя шарнирно сочлененные звенья 21 и 22, при этом звено 21 связано с приводом 23 его поворота посредством секторов 24 и 25, а
Оч
2
Ч)
звено 22 - с его приводом 26 посредством цепной передачи 27 и секторов 28 и 29. На свободном конце звена 22 манипулятора 20 закреплен схват 30, включающий в себя приводные прижимные пластины 31 и про- воротные поддерживающие рамки 32. Каретка снабжена катками 33, закрепленными над ней с возможностью взаимодействия с несущей балкой 14, и катком 34 - с возможностью взаимодействия с опорной балкой 15. Привод каретки 16 связан с электромеханическим тормозом 35.
Для управления перемещения каретки 11 на несущей балке 14 смонтирован блок формирования команды на останов привода катерки 36 с ловителем 37, а на каретке 11 с возможностью взаимодействия с ловителем 37 закреплен контактный элемент, выполненный в виде зубчатой рейки 38.
Блок формирования команд на останов привода каретки 36 включает в себя связанную с ловителем 37 ось 39, подшипники 40, пару конических шестерен 41 и 42, диск 43 со сквозными прорезями 44, механический счетчик 45 и безконтактные датчики 46.
Устройство работает следующим образом.
Устанавливается программа схемы укладки на пульт управления, например пятиричная. Исходное положение робота-укладчика, когда схват поднят, ящики должны поступать с шагом. При первом поступлении картонных ящиков на механизм 3 формирования слоя изделия шток 6 в пневмоцилиндре 5 должен быть опущен. Короба подающим конвейером 1 продвигаются своей длинной стороной до конца (до упора). Проходят две короба (отчет на фиг. 1 не показан). Затем привод 2 отключается.
Сталкиватель 7 переносит два короба на сборочный стол 9. При этом стоп 9 опущен. Затем вновь включается привод 2 и подающий конвейер 1, а шток 6 в пневмоцилиндре 5 поднимается. Короб входит на подающий конвейер 1, упирается в шток 6 и за счет разности скоростей различных точек трущейся поверхности короба происходит развод, ограниченный направляющей 4. Короб устанавливается своей короткой стороной, выходит из контакта со штоком 6 и далее движется короткой стороной. Так проходят еще два короба. Счетное устройство отсчиты- ваеттри короба. Выключается привод2. Сталкиватель 7 перемещает вначале три короба на сборочный стол 9, а затем все пять коробов проталкивает далее на сборочный стол. В итоге на столе 9 собирается сформированный ряд (слой) ящиков. В момент отхода стал- кивателя 7 опускается схват 30 манипулятора 20. Одновременно с помощью пневмоцилиндра 10 стол 9 приподнимается на высоту примерно 20-30 мм. Опустившийся схват с помощью прижимных пластин 31 сжимает короба с заданной силой, сила сжатия регулируется и контролируется пневматической системой (не показана).
В зазор под ящиками вводятся поворотные поддерживающие рамки 32. Манипулятор 20 поднимает схват 30 со слоем коробов
на заданную высоту. Затем рука своими плечами 24 и 25 поднимает группу коробов на заданную высоту. Контроль заданной высоты подъема осуществляется, например, с помощью кодовых отверстий на секторах 25 и
29 и фотодатчиков (не показаны), установленных на каретке 11,
Управление приводами 23 и 26, на выходных валах которых установлены ответные секторы 24 и 28, зацепленные цепями с секторами
25 и 29, позволяет точно устанавливать заданные высоты подьема и опускания схвата. Наличие массы на конце манипулятора 20 всегда натягивает цепи между секторами 28, 29 и 24, 25. Установка конечных выключателей (не показаны), контролирующих натяжные цепи, позволяет при опускании схвата 30 и встрече с любым препятствием (приводящей к исчезновению натяжения цепи) осуществить автоматический останов опускания манипулятора 20
и схвата 30. Такая мягкая посадка ящиков исключает поломки самих ящиков и механизмов устройства.
В дальнейшем с помощью привода 16, звездочки 17 и цепи 18 каретка 11 линейно
перемещается катками 33 и 34 по несущей балке 14 и опорной балке 15. Движение происходит до тех пор, пока зубчатая рейка 38 не встретится с ловителем 37 формирования команд на станов привода, установленным над
точкой останова. Зубчатая рейка 38 поворачивает ловитель 37, жестко закрепленный на оси 39, опирающейся на двух подшипниках 40. Ускорительная коническая шестеренная пара 41 и 52 вращает диск 43 с прорезью 44.
Для шестиэубого ловителя 37 передаточное число конической пары 41, 42 равно 6. При этом каждый зуб рейки 38 проворачивает ловитель 37 на угол 60°, а диск 43 делает полный оборот, пересекая зев двух бесконтактных
датчиков 46. Механический счетчик 55 индицирует количество оборотов диска 43.
При этом отключается привод 16 и включается электромеханический тормоз 35. По программе происходит опускание схвата 30
до встречи его с поддоном. При этом происходит ослабление натяжения цепей, закрепленных на секторах 24,25 и 28 и 29. Конечные микровыключатели (не показаны) срабатывают в зависимости от момента потери натяжения цепей и отключают приводы 16 и 26 звеньев 21 и 22 манипулятора 20.
Далее происходит обратное срабатывание исполнительных механизмов схвата 30 и освобождение его от ящиков. Поворотные поддерживающие рамки 32 разворачиваются, складываются и уходят из-под ящиков. Прижимные пластины 31 раздвигаются и ящики остаются на поддоне. Схват 30 поднимается вверх. Тележка 11 возвращается к столу 9. К этому времени на столе сформирован следующий стол ящиков. Манипулятор 20 опускает схват 30, берет слой ящиков со стола 9 и относит к поддону. Второй слой должен быть уложен в перевязку, поэтому схват вместе со слоем ящикор поворачивают на требуемый угол.
Далее цикл работы уст оЛства повторяется.
Формула изобретения
1. Устройство для пакетирования штучных изделий, содержащее подающий конвейер, механизм формирования слоя изделий, приемный стол для формирования пакета, станину, имеющую стойки и горизонтальные направляющие, установленную на последних подвижную от привода и включающую в себя корпус и катки каретки, приспособление для останова каретки в заданной зоне, манипулятор, включающий в себя последовательно соединенные друг с другом посредством шарниров звенья, первое из которых закреплено на корпусе каретки, и закрепленный на конце последнего
0
5
0
5
0
5
из звеньев схват, отл ича ющееся тем, что, с целью улучшения эксплуатационных характеристик, манипулятор размещен кон- сольно относительно корпуса каретки, его звенья соединены между собой с возможностью независимого поворота относительно друг друга от привода, а упомянутые горизонтальные направляющие включают в себя закрепленную над кареткой несущую и закрепленную на стойках станины опорную балки, катки каретки закреплены на корпусе сверху и сбоку с возможностью взаимодействуя первых из них с несущей, а вторых - с опорной балками, при этом приспособление для останова каретки в заданной зоне включает в себя закрепленный на каретке контактный элемент, смонтированный на несущей балке блок формирования команды на останов привода каретки и кинематически связанный с ним ловитель, установленный с возможностью взаимодействия с упомянутым контактным элементом.
2. Устройство по п. 1.отличающее- с я тем, что блок формирования команды на останов привода каретки выполнен в виде диска со сквозными прорезями, бесконтактных выключателей, в зев которых введен упомянутый диск, и кинематически связанного с последним вала, перпендикулярного несущей направляющей, ловитель выполнен в виде зубчатой звездочки, закрепленной на упомянутом валу, а контактный элемент - в виде параллельной несущей направляющей зубчатой рейки.
J6
J7
32
п
зз К/
ы
/
| название | год | авторы | номер документа |
|---|---|---|---|
| Подвесной конвейер | 1983 |
|
SU1084192A1 |
| МАШИНА ДЛЯ ПОСЛОЙНОЙ УКЛАДКИ ШТУЧНЫХ ИЗДЕЛИЙ В ТАРУ | 2006 |
|
RU2303560C1 |
| Механизированный многоярусный накопитель | 1988 |
|
SU1699866A1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ МНОГОСЛОЙНЫХ ПАНЕЛЕЙ, МНОГОСЛОЙНАЯ ПАНЕЛЬ, РАСКЛАДНАЯ ОПАЛУБКА ДЛЯ ИЗГОТОВЛЕНИЯ МНОГОСЛОЙНЫХ ПАНЕЛЕЙ, ТЕХНОЛОГИЧЕСКАЯ ЛИНИЯ ПО ИЗГОТОВЛЕНИЮ МНОГОСЛОЙНЫХ ПАНЕЛЕЙ, СПОСОБ ВОЗВЕДЕНИЯ МОНОЛИТНО-КАРКАСНОГО ЗДАНИЯ ИЗ МНОГОСЛОЙНЫХ ПАНЕЛЕЙ С ДЕКОРАТИВНОЙ НАРУЖНОЙ ОТДЕЛКОЙ | 2012 |
|
RU2515491C1 |
| Автоматическая литейная линия | 1985 |
|
SU1416269A1 |
| СТОЛ ПЕРЕГРУЗОЧНЫЙ | 2018 |
|
RU2695863C1 |
| МНОГОЯРУСНАЯ МЕХАНИЗИРОВАННАЯ АВТОСТОЯНКА | 1997 |
|
RU2120012C1 |
| ПОДЪЕМНО-ТРАНСПОРТНОЕ ОБОРУДОВАНИЕ КОМПЛЕКСА ТЕРМООБРАБОТКИ КЕРАМИЧЕСКИХ ИЗДЕЛИЙ И КАССЕТА ДЛЯ ТРАНСПОРТИРОВКИ КЕРАМИЧЕСКИХ ИЗДЕЛИЙ | 2013 |
|
RU2526572C1 |
| Устройство для укладки изделий в пакет | 1990 |
|
SU1823855A3 |
| СПОСОБ ИЗГОТОВЛЕНИЯ СТРОИТЕЛЬНЫХ БЛОКОВ ПРЕССОВАНИЕМ, ПРЕСС-ФОРМА И ЛИНИЯ ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 1995 |
|
RU2087307C1 |
Изобретение относится к транспортным роботам-укладчикам ящиков на поддоны и может найти применение во всех отраслях промышленности, где применяются ящики. Цель изобретения - улучшение эксплуатационных характеристик. Устройство содержит подающий конвейер, механизм формирования слоя изделий, приемный стол для формирования пакета, станину, имеющую стойки и несущую и опорную направляющие, установленную на направляющих каретку, на которой консольно-шарнирно закреплен манипулятор, включающий последовательно соединенные с возможностью независимого поворота от привода посредством шарниров звенья. На свободном конце манипулятора установлен схват. Над кареткой и сбоку от нее закреплены катки с возможностью взаимодействия первых из них с несущей, а вторых - с опорной балками. Для останова каретки в заданной зоне на ней закреплен контактный элемент, а на несущей балке - блок формирования команды на останов привода каретки и кинематически связанный с ним ловитель, установленный с возможностью взаимодействия с контактным элементом. 1 з.п.ф-лы. 5 ил. fe
/ I
L
ч /
,30
/2
27
33
Г
Ј
| Устройство для пакетирования штучныхгРузОВ | 1978 |
|
SU819014A1 |
| кл | |||
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
