Изобретение относится к судостроению.
Цель изобретения - повышение эффективности работы.
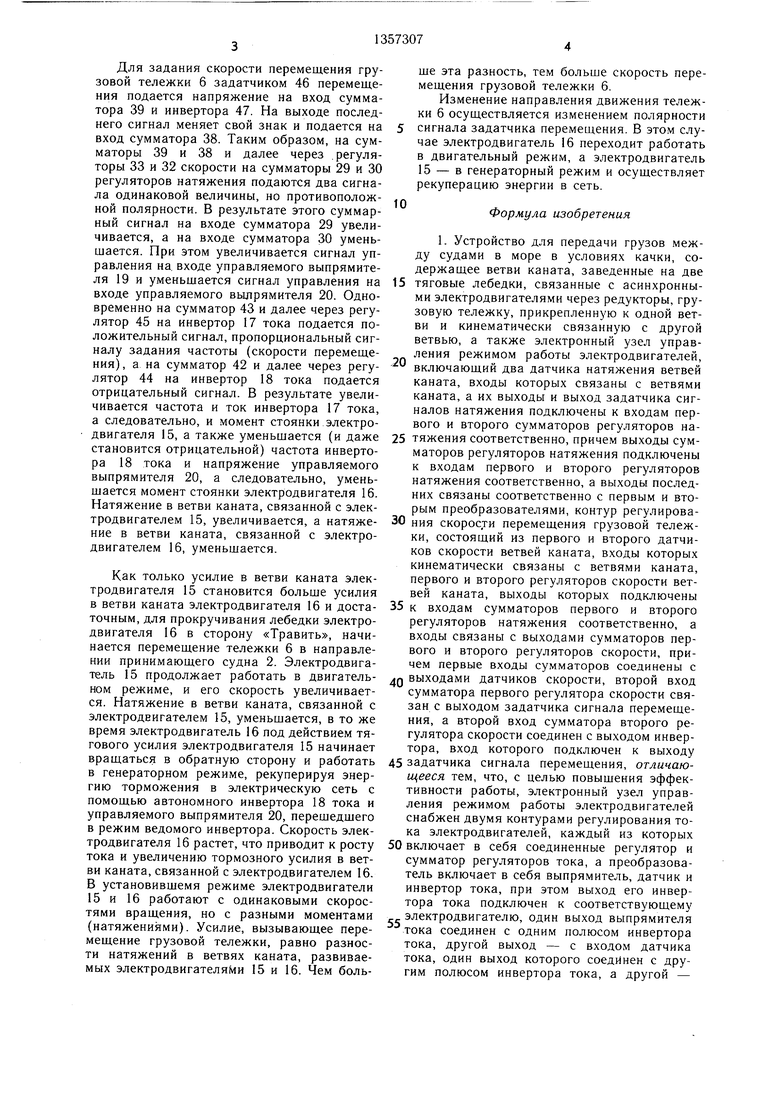
На фиг. 1 изображена кинематическая схема предлагаемой системы передачи грузов; на фиг. 2 - функциональная схема.
Устройство передачи грузов между передающим судном 1 и принимающим судном 2 содержит мачты 3 и 4, между которыми натянуты ветви каната 5. Груз находится в тележке 6, соединенной с блоком 7, перемещающимся по верхней ветви каната 5, и жестко связанной с нижней ветвью каната, петля которого огибает блок 8 на мачте 4 принимающего судна 2, а два конца, огибающие блоки 9 и 10 на мачте 3 передающего судна 1, соединены с тяговыми лебедками И и 12. Лебедки 11 и 12 через редукторы 13 и 14 соединены со своими электродвигателями 15 и 16 переменного тока. Последние подключены к автономным инверторам 17 и 18 тока контуров I и II преобразователей частоты. Автономные инверторы 17 и 18 получают питание от управляемых выпрямителей 19 и 20 тех же контуров I и II преобразователей частоты через датчики 21 и 22 тока. Входы управляемых выпрямителей 19 и 20 через регуляторы 23 и 24 тока соединены с выходами сумматоров 25 и 26 регуляторов тока, к первым входам которых подключены выходы регуляторов 27 и 28 натяжения, а к вторым входам - выходы датчиков 21 и 22 тока. Входы регуляторов 27 и 28 натяжения связаны с выходами сумматоров 29 и 30 регуляторов натяжения, входы последних связаны с выходами задатчика 31 натяжения, регуляторов 32 и 33 скорости перемещения и датчиков 34 и 35 натяжения ветвей каната, которые через блоки 36 и 37 связаны с ветвями каната. Выходы сумматоров 38 и 39 регуляторов скорости соединены с входами регуляторов 32 и 33, а входы этих сумматоров соединены с выходами датчиков 40 и 41 скорости ветвей каната, входы которых кинематически связаны с ветвями каната. Выходы датчиков 40 и 41 скорости, кроме того, связаны с одними из входов сумматоров 42 и 43 регуляторов 44 и 45 частоты, выходы последних подключены к автономным инверторам 18 и 17 тока. Два других входа сумматоров 42 и 43 регуляторов частоты связаны с выходами сумматоров 30 и 29 регуляторов 28 и 27 натяжения.
Вход сумматора 39 регулятора скорости соединен также с выходом задатчика 46 сигналов перемещения, к выходу последнего подключен также инвертор 47. Выход инвертора 47 связан с входом сумматора 38 регулятора 32 скорости.
Система работает следующим образом.
В исходном состоянии сигналы управления Lly и Uyz на входе управляемых выпрямителей 19 и 20 сигналы управления Uy3 и
1}у4 на входе автономных инверторов 17 и 18 равны 0,5. Напряжения управляемых выпрямителей и частоты автономных инверторов равны нулю. Электродвигатели 15 и 16 неподвижны, и натяжение в канатной дороге равно нулю.
Задание натяжения производится подачей задающего сигнала на входы сумматоров 29 и 30 и далее на входы регуляторов 27 и 28 натяжения, а также через сумматоры 43 и 42 на регуляторы 45 и 44 частоты. Выходное напряжение регуляторов 27 и 28 натяжения подается на входы сумматоров 25 и 26 и далее на входы соответствующих регуляторов 23 и 24 тока.
Выходное напряжение регуляторов 45 и 44 частоты подается на входы соответствующих инверторов 17 и 18 тока. В результате на выходе управляемых выпрямителей появляется положительное напряжение, которое в автономных инверторах 17 и 18 тока преобразуется в переменный ток минимальной частоты. При этом частоты инверторов 17 и 18 тока положительны, что соответствует двигательному режиму работ электродвигателей 15 и 16. Величина тока инверторов благодаря действию обратных связей в каждом токовом контуре практически мгновенно устанавливается равной заданной со статической погрещностью на входах. Электродвигатели 15 и 16 начинают вращаться в разные стороны, выбирая слабину канатов. По мере работы электродвигателей увеличивается натяжение в канатах и умень- щаются их скорости вращения, что приводит к увеличению сигналов на выходе датчиков 35 и 34 натяжения, и к умень- щению сигналов на выходе датчиков 41 и 40
скорости. В результате уменьщаются сигналы разбаланса на входах регуляторов 27 и 28 натяжения и регуляторов 45 и 44 частоты, а следовательно, уменьшаются сигналы разбаланса на входах регуляторов 23 и 24 тока и
выходное напряжение регуляторов 45 и 44 частоты. В установившемся режиме электродвигатели неподвижны, находятся под током и развивают одинаковые тяговые усилия, равные заданному натяжению. Сигналы на входах регуляторов 27 и 28 натяжения и регуляторов 23 и 24 тока, а также регуляторов 45 и 44 частоты близки к нулю, напряжения управляемых выпрямителей минимальны, а токи выпрямителей и электродвигателей соответствуют заданному натяжению в ветвях каната. Частоты инверторов 17 и 18 тока положительны и минимальны.
При отработке сигнала задания натяжения на входы сумматоров 29 и 30 регуля торов 27 и 28 натяжения поступают также
сигналы датчиков 41 и 40 скорости через регуляторы 33 и 32 скорости, что несколько замедляет время установления заданного натяжения и уменьшает динамические усилия в канатной дороге.
Для задания скорости перемещения грузовой тележки б задатчиком 46 перемещения подается напряжение на вход сумматора 39 и инвертора 47. На выходе последнего сигнал меняет свой знак и подается на вход сумматора 38. Таким образом, на сумматоры 39 и 38 и далее через .регуляторы 33 и 32 скорости на сумматоры 29 и 30 регуляторов натяжения подаются два сигнала одинаковой величины, но противоположной полярности. В результате этого суммарный сигнал на входе сумматора 29 увеличивается, а на входе сумматора 30 уменьшается. При этом увеличивается сигнал управления на, входе управляемого выпрямителя 19 и уменьщается сигнал управления на входе управляемого выпрямителя 20. Одновременно на сумматор 43 и далее через регулятор 45 на инвертор 17 тока подается положительный сигнал, пропорциональный сигналу задания частоты (скорости перемещения), а на сумматор 42 и далее через регулятор 44 на инвертор 18 тока подается отрицательный сигнал. В результате увеличивается частота и ток инвертора 17 тока, а следовательно, и момент стоянки электродвигателя 15, а также уменьшается (и даже становится отрицательной) частота инвертора 18 тока и напряжение управляемого выпрямителя 20, а следовательно, уменьщается момент стоянки электродвигателя 16. Натяжение в ветви каната, связанной с электродвигателем 15, увеличивается, а натяжение в ветви каната, связанной с электродвигателем 16, уменьщается.
Как только усилие в ветви каната электродвигателя 15 становится больше усилия в ветви каната электродвигателя 16 и достаточным, для прокручивания лебедки электродвигателя 16 в сторону «Травить, начинается перемещение тележки 6 в направлении принимающего судна 2. Электродвигатель 15 продолжает работать в двигательном режиме, и его скорость увеличивается. Натяжение в ветви каната, связанной с электродвигателем 15, уменьшается, в то же время электродвигатель 16 под действием тягового усилия электродвигателя 15 начинает вращаться в обратную сторону и работать в генераторном режиме, рекуперируя энергию торможения в электрическую сеть с помощью автономного инвертора 18 тока и управляемого выпрямителя 20, перешедшего в режим ведомого инвертора. Скорость электродвигателя 16 растет, что приводит к росту тока и увеличению тормозного усилия в ветви каната, связанной с электродвигателем 16. В установившемя режиме электродвигатели 15 и 16 работают с одинаковыми скоростями вращения, но с разными моментами (натяжениями). Усилие, вызывающее перемещение грузовой тележки, равно разности натяжений в ветвях каната, развиваемых электродвигателями 15 и 16. Чем больше эта разность, тем больше скорость перемещения грузовой тележки 6.
Изменение направления движения тележки 6 осуществляется изменением полярности сигнала задатчика перемещения. В этом случае электродвигатель 16 переходит работать в двигательный режим, а электродвигатель 15 - в генераторный режим и осуществляет рекуперацию энергии в сеть.
0.
Формула изобретения
1. Устройство для передачи грузов между судами в море в условиях качки, содержащее ветви каната, заведенные на две
5 тяговые лебедки, связанные с асинхронными электродвигателями через редукторы, грузовую тележку, прикрепленную к одной ветви и кинематически связанную с другой ветвью, а также электронный узел управления режимом работы электродвигателей,
включающий два датчика натяжения ветвей каната, входы которых связаны с ветвями каната, а их выходы и выход задатчика сигналов натяжения подключены к входам первого и второго сумматоров регуляторов на5 тяжения соответственно, причем выходы сумматоров регуляторов натяжения подключены к входам первого и второго регуляторов натяжения соответственно, а выходы последних связаны соответственно с первым и вторым преобразователями, контур регулирова0 ния скорости перемещения грузовой тележки, состоящий из первого и второго датчиков скорости ветвей каната, входы которых кинематически связаны с ветвями каната, первого и второго регуляторов скорости ветвей каната, выходы которых подключены
5 к входам сумматоров первого и второго регуляторов натяжения соответственно, а входы связаны с выходами сумматоров первого и второго регуляторов скорости, причем первые входы сумматоров соединены с
д выходами датчиков скорости, второй вход сумматора первого регулятора скорости связан с выходом задатчика сигнала перемещения, а второй вход сумматора второго регулятора скорости соединен с выходом инвертора, вход которого подключен к выходу
5 задатчика сигнала перемещения, отличающееся тем, что, с целью повышения эффективности работы, электронный узел управления режимом работы электродвигателей снабжен двумя контурами регулирования тока электродвигателей, каждый из которых
0 включает в себя соединенные регулятор и сумматор регуляторов тока, а преобразователь включает в себя выпрямитель, датчик и инвертор тока, при этом выход его инвертора тока подключен к соответствующему электродвигателю, один выход выпрямителя тока соединен с одним полюсом инвертора тока, другой выход - с входом датчика тока, один выход которого соединен с другим полюсом инвертора тока, а другой -
с одним входом сумматора регулятора тока, причем другие входы первого и второго сумматоров соединены соответственно с выходами первого и второго регуляторов натяжения, а выходы первого и второго регуляторов тока подключены соответственно к входам первого и второго выпрямителей тока.
2. Устройство по п. 1, отличающееся тем, что электронный узел управления режимом работы электродвигателей снабжен первым и
вторым регуляторами частоты и сумматорами этих регуляторов, при этом выходы регуляторов подключены соответственно к первому и второму инверторам тока, а входы - соответственно к выходам сумматоров первого и второго регуляторов частоты, причем первые входы последних подключены соответственно к выходам первого и второго сумматоров регуляторов натяжения, а вторые входы - соответственно к выходам первого и второго датчиков скорости.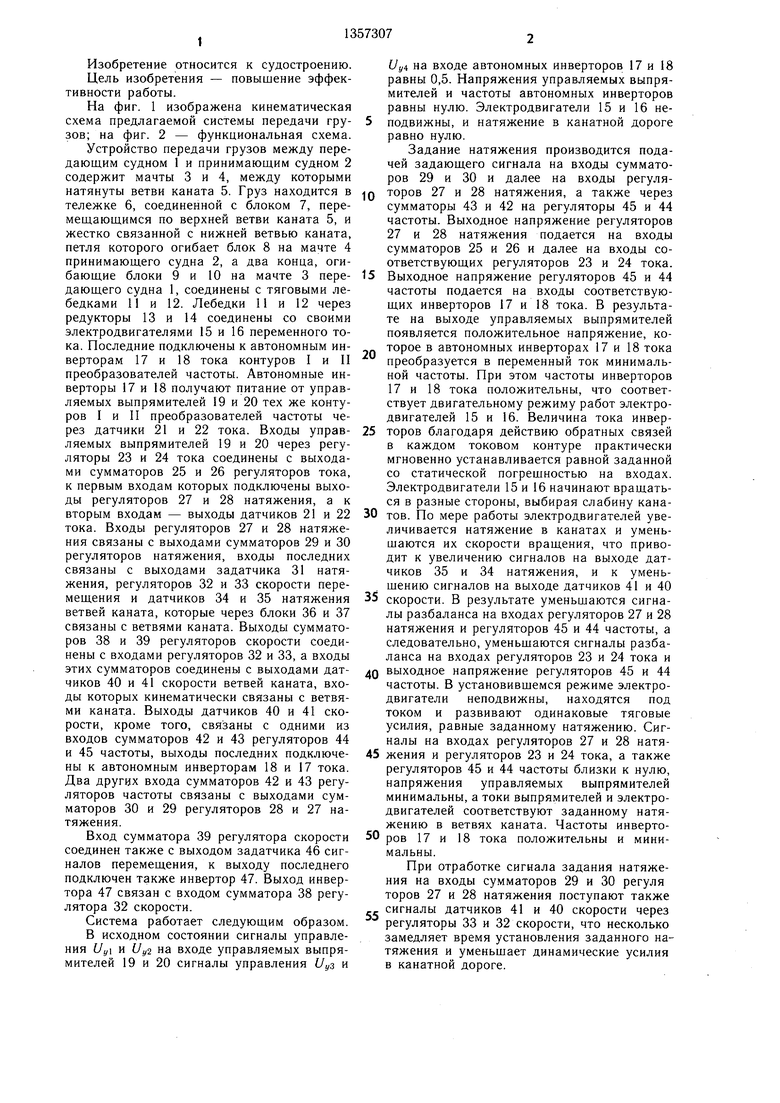
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для передачи грузов между судами в море в условиях качки | 1988 |
|
SU1601020A1 |
| Устройство для передачи грузов между судами в море в условиях качки | 1981 |
|
SU969584A1 |
| Система передачи грузов между судами в море в условиях качки | 1982 |
|
SU1013342A1 |
| Устройство для передачи грузов между судами в море в условиях качки | 1982 |
|
SU1049342A1 |
| Устройство для передачи грузов между судами в море в условиях качки | 1982 |
|
SU1057368A1 |
| Устройство для передачи грузов между судами в море в условиях качки | 1980 |
|
SU893700A1 |
| Система передачи грузов между судами в море | 1988 |
|
SU1594063A1 |
| Устройство для передачи грузов между судами в море в условиях качки | 1981 |
|
SU958217A1 |
| СПОСОБ И СИСТЕМА ТРАВЕРЗНОЙ ПЕРЕДАЧИ СУХИХ И ЖИДКИХ ГРУЗОВ МЕЖДУ СУДАМИ НА ХОДУ | 2015 |
|
RU2584047C1 |
| Электропривод лебедки экскаватора-драглайна | 1991 |
|
SU1775832A1 |
Изобретение относится к судостроению. Цель изобретения - повышение эффективности работы. Устройство содержит передающее судно с мачтой 3 и принимаюш,ее судно с мачтой 4, между которыми натянуты ветви каната 5 с грузовой тележкой, концы которого соединены с лебедками 11,12, соединенными через редукторы 13,14 с электродвигателями 15,16, а также электронный узел управления режимом работы электродвигателей, включаюш.ий в себя два контура частоты тока, каждый из которых состоит из соединенных между собой инверторов 17,18 тока, датчиков 21,22 тока и выпрямителей 23,24 тока, подключенных соответственно к контурам стабилизации натяжения, что улучшает динамику регулирования натяжения канатов, два регулятора 44,45 частоты с соответствующими сумматорами 42,43, соединенные соответственно с контурами стабилизации скорости, что обеспечивает получение стабильных скоростей перемещения грузовой тележки и требуемой перегрузочной способности электродвигателей 17,18. 1 з.п.ф-лы, 2 ил. (6 (Л J7 со СЛ 00 2 , г-Л-- у:@ В а Фиг.г
/
S
фиг.1
| Устройство для передачи грузов между судами в море в условиях качки | 1982 |
|
SU1049342A1 |
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
