1
Изобретение относится к системам автоматического управления технологическими объектами, имеющими «чистое запаздывание, и может быть использовано в химической, нефтехимической и других отраслях промышленности.
Цель изобретения - улучшение качества управления.
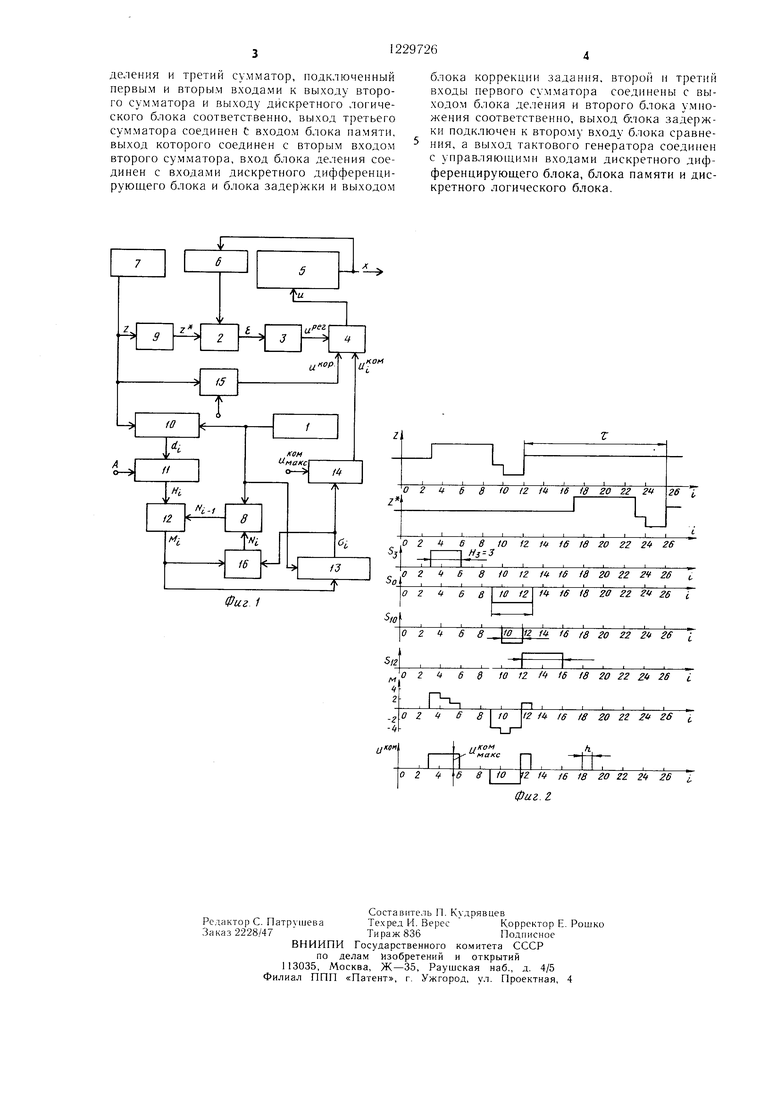
На фиг. 1 представлена блок-схема системы; на фиг. 2 - диаграммы работы системы.
Система содержит тактовый генератор 1, блок 2 сравнения, блок 3 регулирования, первый сумматор 4, объект 5 управления, блок 6 измерения, блок 7 коррекции задания, блок 8 памяти, блок 9 задержки, дискретный дифференцируюший блок 10, первый блок 11 умножения, второй сумматор 12, дискретный логический блок 13, второй блок 14 умножения, блок 15 деления и третий сумматор 16.
Система работает следующим образом.
С помощью блока 6 измеряется регулируемая переменная X, а в блоке 2 сравнения определяется ощибка регулирования по формуле:
X,(1)
где Z(/)Z(/-т) - сдвинутое с помощью блока 9 задержки в прошлое на время т значение задания Z, выдавае.мое блоко.м 7 коррекции задания.
С помощью блока 3 регулирования формируется регулирующее воздействие, например, по ПИ-закону:
Uper ,(2)
JD
при этом настройки {/( и /С ) выбираются исходя из оптимальности при возмущении по входу объекта.
С помощью блока 15 деления формируется корректирующее воздействие
12
t/
К
0$
(3)
об
где К - коэффициент усиления объекта. С помощью дискретного дифференцирующего блока 10 определяется значение дискретной производной задания:
.(4)
где h - величина интервала дискретности, задаваемой тактовым генератором 1;
i - номер интервала дискретности.
С помощью блока 11 умножения рассчитывается длительность //, прямоугольного импульса Si, необходимая для компенсации возмущения di:
т об
IX ОО Г
.
(5)
постоянная времени объекта; уровень импульса, задаваемый как максимально допустимое значение компенсирующего воздействия.
297262
Выражение (5) получено из условия максимального быстродействия системы регулирования для объекта 1-го порядка.
Для каждого формируется прямоугольный импульс уровня со знаком, равным знаку Я,, и длительностью (7/,). В случае наложения импульсов во времени их длительности складываются с учетом своих знаков.
С этой целью с помощью сумматоров 10 12 и 16, блока 8 памяти и логического блока 13 формируются вспомогате.;1ьные переменные М, jV и (Т.
M,,,i +//,;
ff,
.М -1 ,- А, 1
./V, М, - а/.
(6)
(7) (8)
Переменная /W, имеет знак выдаваемого импульса и ее целая часть равна количеству оставшихся интервалов /z, в течение которых импульс еще должен выдерживаться. С помопдью блока 14 выдается компенсирующее воздействие:
. .,40
Ui - а, С/лакь:
(9)
С помощью сумматора 4 формируется и выдается на объект 1 полное управляющее 30 воздействие:
и
per
и
кор
и
:io)
Работа предлагаемой системы управления во времени проиллюстрирована диаграммами (фиг. 2). В момент / 3 произоп ло изменение задания на 3 единицы, т. е. из 3, следовательно, (в предположении, что /4 1). Компенсирующее воздействие представляет собой импульс длительностью 3.
В моменты 9, 10, 12 изменение зада- ния соответственно равно -4, -2, 4. Суммарное ко.мпенсирующее воздействие выдерживается при ( 9, 10, 11 равным -f/Дкс и при ( 12 равным + i.
45
Формула изобретения
Система автоматического управления для объектов с запаздыванием, содержащая тактовый генератор, последовательно соединенные блок сравнения, блок регулирования и сумматор, 1од:ключенный выходом к входу объекта управления, выход которого соединен через блок измерения с первым входом блока сравнения, и блок коррекции задания, отличающаяся тем, что, с целью улучшения качества управления, в нее введепь блок памяти, блок задержки, последовательно соединенные дискретный дифференцирующий блок, первый блок умножения, второй сумматор, дискретный логический блок и второй блок умно: кения, а также блок
деления и третий сумматор, подключенный первым и вторым входами к выходу второго сумматора и выходу дискретного логического блока соответственно, выход третьего сумматора соединен С входом блока памяти, выход которого соединен с вторым входом второго сумматора, вход блока деления соединен с входами дискретного дифференцирующего блока и блока задержки и выходом
блока коррекции задания, второй и третий входы первого сумматора соединены с выходом блока деления и второго блока умножения соответственно, выход б лока задержки подключен к второму входу блока сравнения, а выход тактового генератора соединен с управляющими входами дискретного дифференцирующего блока, блока памяти и дискретного логического блока.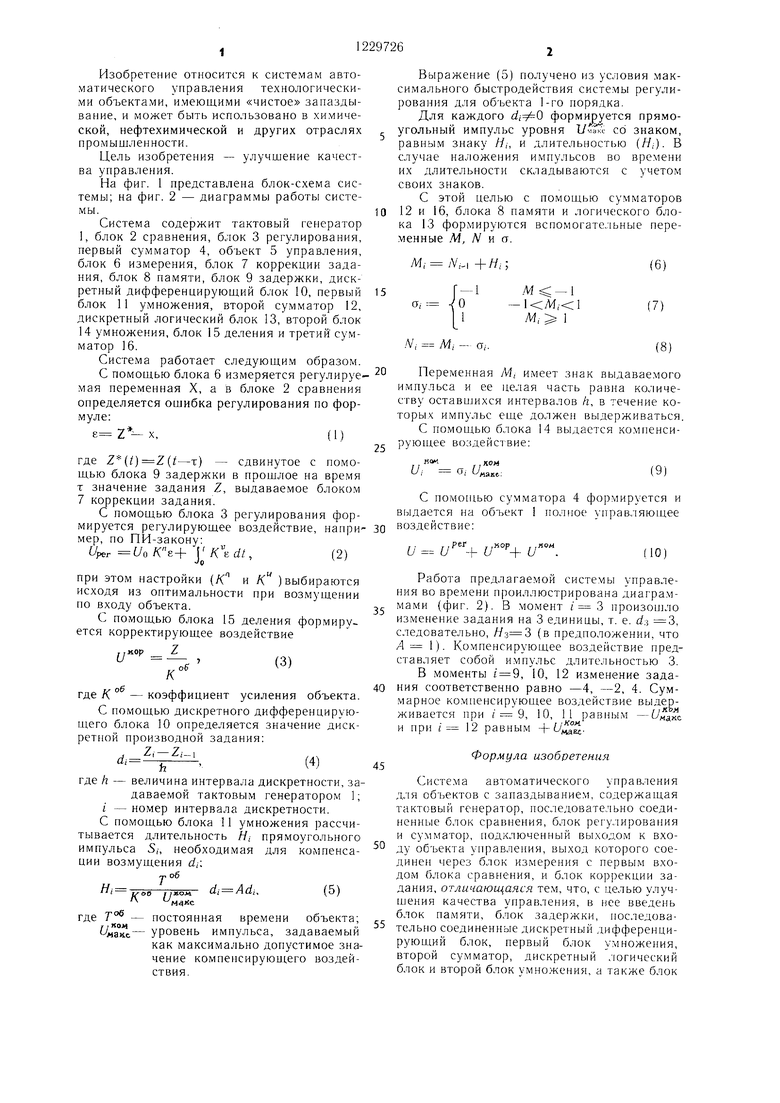
| название | год | авторы | номер документа |
|---|---|---|---|
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА КОМБИНИРОВАННОГО РЕГУЛИРОВАНИЯ | 1989 |
|
RU2022313C1 |
| ДИСКРЕТНАЯ СИСТЕМА ОЦЕНИВАНИЯ | 2007 |
|
RU2398258C2 |
| Система цифрового управления | 1981 |
|
SU970319A1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1339494A1 |
| СПОСОБ УПРАВЛЕНИЯ ГРУППОЙ ИМПУЛЬСНЫХ ПРЕОБРАЗОВАТЕЛЕЙ | 1983 |
|
SU1284443A1 |
| Система адаптивного управления параметром технологического процесса | 1988 |
|
SU1620989A1 |
| Способ автоматизированного управления рабочим процессом роторного экскаватора и система управления для его осуществления | 1985 |
|
SU1686078A1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1511734A1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1388826A2 |
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 2016 |
|
RU2616219C1 |
Изобретение относится к системам автоматического управления технологическими объектами, имеющими «чистое запаздывание, и может быть иснользовано в химической, нефтехимической и других отраслях промышленности. Изобретение позволяет улучшить качество управления. Это достигается те.м, что на объект подаются сигналы корректирующего и компенсирующего воздействий, которые формируются как функции от задающего сигнала и его дискретной производной. Корректирующее воздействие формируется с помощью блока деления с учетом коэффициента усиления объекта. Регулирующее воздействие выбирают с учетом времени задержки объекта по пропорционально-интегральному закону, коэффициенты которого выбирают из условия обеспечения заданного качества переходных процессов при воздействии возмущения на вход объекта. Компенсирующее воздействие формируется с помощью дискретного дифференцирующего блока, двух блоков умножения, двух сумматоров, блока памяти и дискретного логического блока. Величину компенсирующего воздействия выбирают из условия обеспечения максимального быстродействия системы регулирования для объекта первого порядка. Регулирующее, корректирующее и компенсирующее воздействие суммируются и подаются на вход объекта. 2 ил. i ND ts3 C5
U
02 6 8 Ю /2 If 16 ia го 22 2
26 i
jI I
J1L
0 2 В в to 1Z if 16 /в го 22 2 26 Hi--3
0 2 t В 8 10 12 ift tS 18 20 22 24 26
IB 12
/« iB 18 20 2Z 2f 26 i
8 , f 16 /8 го 22 Zf 26 I
0 2 it 66 10 12 / 16 18 20 22 26 L
R
0 Z ч в 8 10 I2 ilt 16 tS 20 22 Zf 26
0 2 «
6 8 10 JZ /« /6 18 20 22 2 f 26 i
фиг. 2.
| Патент США № 3938017, кл | |||
| Способ получения мыла | 1920 |
|
SU364A1 |
| Система цифрового управления | 1981 |
|
SU970319A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
