(5) ЗАХВАТ

| название | год | авторы | номер документа |
|---|---|---|---|
| Захват промышленного робота | 1980 |
|
SU975387A1 |
| Схват | 1983 |
|
SU1079429A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1990 |
|
RU2042503C1 |
| Захватное устройство | 1986 |
|
SU1421530A1 |
| Двухместное захватное устройство | 1988 |
|
SU1516346A2 |
| Двухместное захватное устройство | 1986 |
|
SU1316815A1 |
| Захват промышленного робота | 1985 |
|
SU1310202A1 |
| Многошпиндельный токарный авто-MAT | 1979 |
|
SU852448A1 |
| МЕХАНИЗМ СВОБОДНОГО ХОДА | 2007 |
|
RU2361130C1 |
| Захват промышленного робота | 1981 |
|
SU963852A1 |
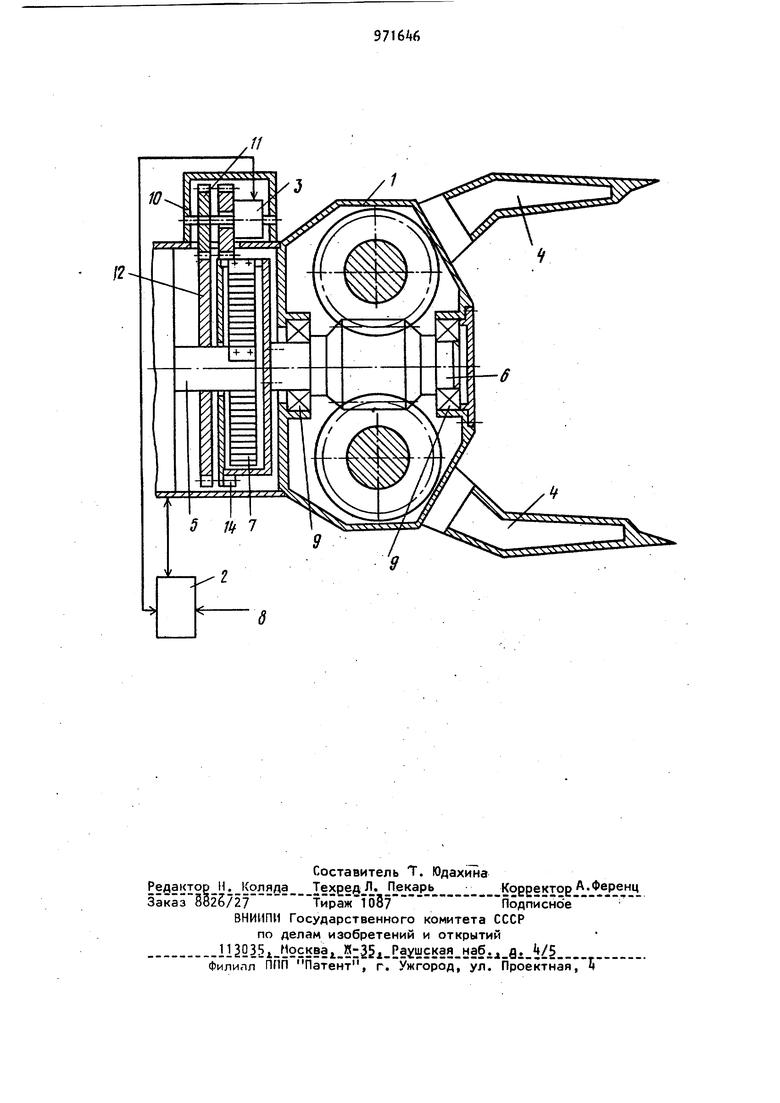
Изобретение относится к захватным устройствам и может быть исполь-х зовано в конструкциях автоматических манипуляторов и промышленных роботов для автоматизации производственных процессов, а также в конструкциях роботов различного назначения для контроля и регулирования усилия зажима губок захвата. Известен ;захват, содержащий корпус зажимные губки, кинематически связанныв, например, посредством червячной передачи с валом привода, и датчик об ратной связи по усилию, снабженный вы ходным валом 1 . Недостатком известного захвата является низкая надежность, связанная с необходимостью применения сложных планетарных передач. Цель изобретения - повышение надеж ности работы захвата. .Целк достигается тем, что захват снабжен двумя зубчатыми парами, кажда из которых выполнена в виде шестерни и ведущего колеса, при этом ведущее колесо одной пары жестко связано с валом привода, шестерня этой пары жестко связана с выходным валом датчика, ведущее колесо другой пары жестко связано с червяком червячной передачи и через упругий элемент связано с валом привода, а шестерня этой пары жестко связана с корпусом датчика. На чертеже изображен предлагаемый захват. Захват состоит из корпуса 1, задающего устройства 2 с обратной связью по усилию, датчика обратной связи 3 по усилию захвата, зажимных губок , кинематически связанных с валом привода 5 и датчиком обратной связи по усилию 3 червячной передачи 6, спиральной пружины 7. Вал привода 5 соединен с внутренним концом спиральной пружины 7. Внешний конец пружины 7 соединен с червячной передачей 6.
. 39716 64
Задающее устройство 2 воспринимает ния. По достижении заданного усилия сигналы системы управления 8 и датчи- зажима вал 5 останавливается. КЗ обратной связи 3.Предложенный захват надежен в раЧервяк 6 установлен в корпусе 1 боте, обеспечивает требуемое усилие на подшипниках 9.5 зажима детали.
На выходном валу 10 датчика 30 жестко закреплена шестерня 11, находящаяся в зацеплении с ведущим колесом 12,Формула изобретения жестко закрепленным на валу 5. На корпусе датчика жестко закреплена шее- в Захват, содержащий корпус, зажимтерня 13, находящаяся в зацеплении с иые губки, кинематически связанные, зубчатым колесом 4, жестко связан- например, посредством червячной переданым с червяком. чи,с валом привода,и датчик обратной Предлагаемый захват работает еле- связи по усилию, снабженный выходным дующим образом. 5 валом, отличающийся тем. По сигналу задающего устройства 2, что, с целью повышения надежности, он привод 5 передает крутящий момент че-: снабжен двумя зубчатыми парами, каждая |рез спиральную Пружину 7 на червячну из которых выполнена в виде шестерни передачу 6. При этом происходит зажим и ведущего колеса, при этом ведущее губок ,. При соприкосновении губок 30 колесо одной пары жестко связано с с объектом манипулирования червяк 6 валом привода, шестерня этой пары жестостанавливается, а вал 5, вращаясь, ко связана с выходным валом датчика, вызывает угловое перемещение вала 10 ведущее колесо другой пары жестко свядатчика относительно его корпуса. Это зано с червяком червячной передачи и достигается за счет зубчатых колес 12 2$ через упругий элемент связано с ваи 1 и шестерен 11 и 13. лом привода, а шестерня этой пары жестДатчик обратной связи 3 измеряя ко связана с корпусом датчика, угол рассогласования вала привода 5 Источники информации, и,червяка 6 (а значит изм«5ряя сте- принятые во внимание при экспертизе пень сжатия пружины 7) выдает сигналу, 30 1. Авторское свидетельство СССР на задающее устройство 2 у1Я сравне- № , кп. В 25 J 15/00, 1979.
12
