(5)ЗАХВАТ ПРОМЫШЛЕННОГО РОБОТА
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват манипулятора | 1981 |
|
SU965655A1 |
| Кисть механической руки промышленногоРОбОТА | 1979 |
|
SU841961A1 |
| Схват | 1983 |
|
SU1079429A1 |
| Захват промышленного робота | 1979 |
|
SU841962A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1990 |
|
RU2042503C1 |
| Клещевая подача к горячештамповочному прессу | 1989 |
|
SU1690920A1 |
| Устройство для обработки концов деталей типа стержней | 1974 |
|
SU529008A1 |
| Захватное устройство | 1988 |
|
SU1549748A1 |
| АВТОМАТ ДЛЯ ДВУСТОРОННЕЙ ВЫСАДКИ ДЕТАЛЕЙ СТЕРЖНЕВОГО ТИПА | 1971 |
|
SU307841A1 |
| Устройство дл маркировки изделий | 1969 |
|
SU496613A1 |
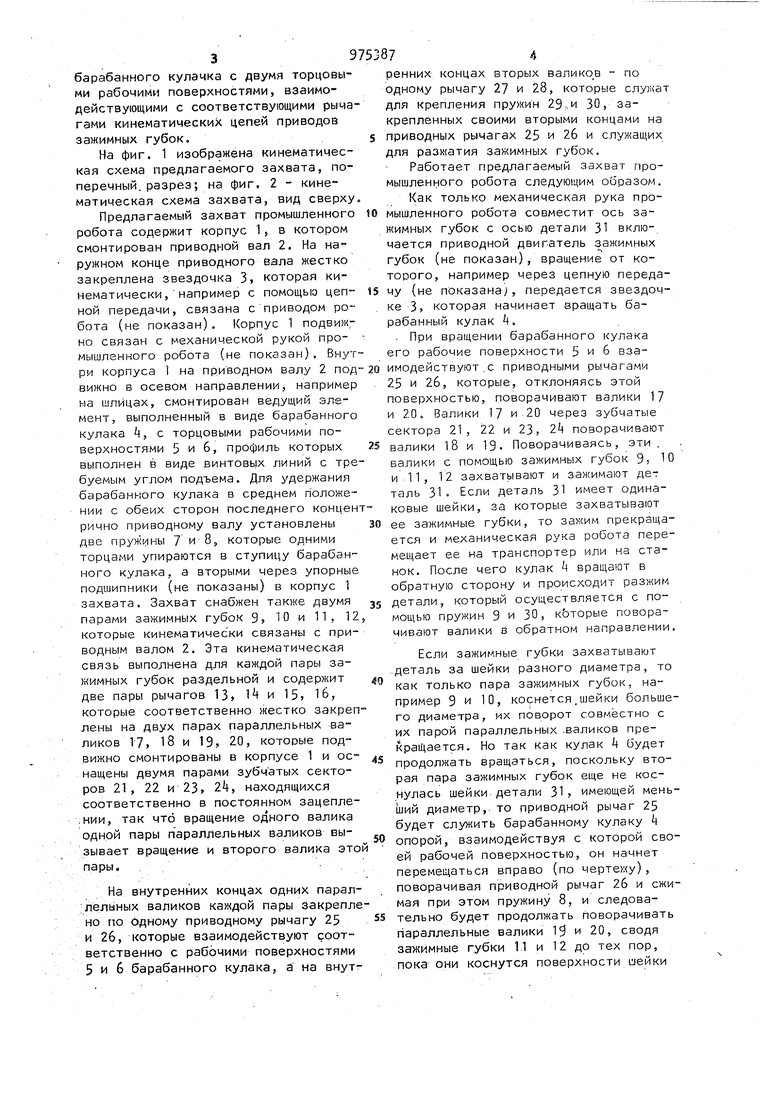
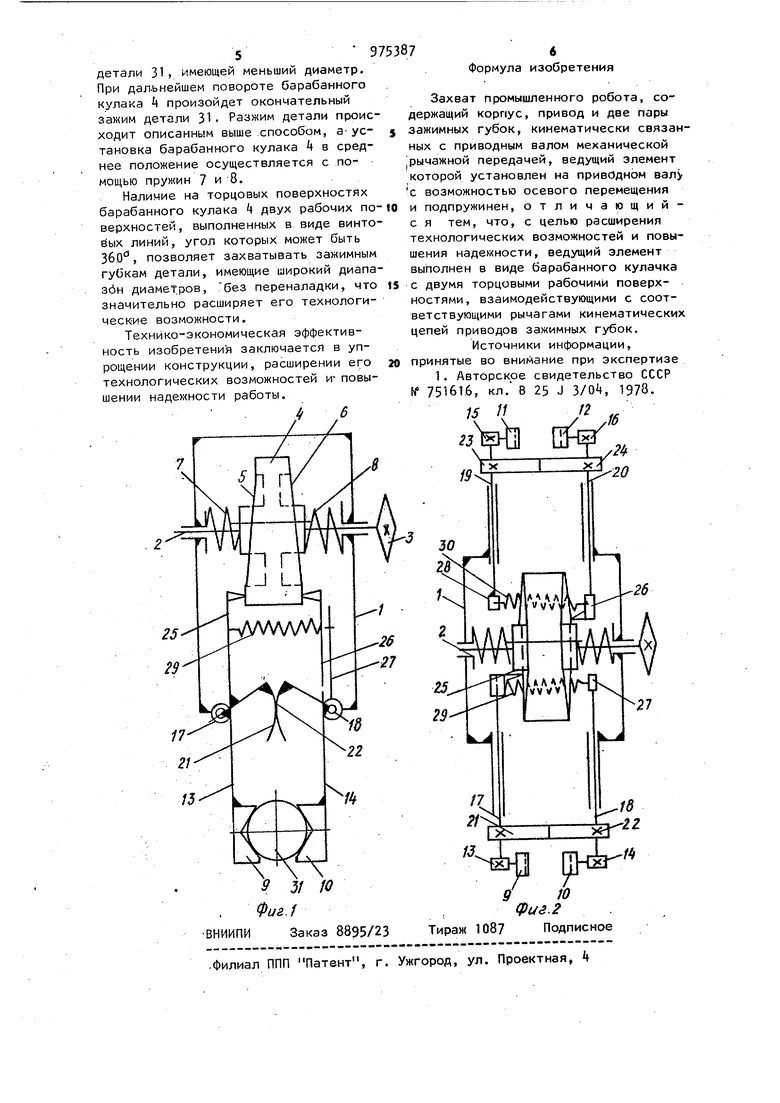
Изобретение относится к машино.строению, в частности для оснащения роботов (манипуляторов),служащих для подачи деталей к станкам и агрегатам при обработке. Известен захват промышленного робота, содержащий задающее устройство с обратнойсвязью по усилию, имеющее датчик обратной связи, привод и зажимные губки, кинематически связанны с приводным валиком с помощью механической передачи, ведущий элемент которой установлен на приводном валу с возможностью осевого перемещения и подпружинен, причем ведущий элемент механической передачи выполнен в виде червяка, связан с пружиной и датчиком через опору качения, а на з жимных губках смонтированы червячные колеса. Кроме того, червячные колеса этого захвата выполнены с неполным зубчатым венцом и образуют с червяком самотормозящуюся пару С13. Недостатком этого захвата является то, что механическая передача приводазажима губок, выполненная в виде червячного редуктора, имеет сложное конструктивное исполнение. Кроме того, с помощью этого зажима не представляется возможности транспортировать валики, имеющие несколько ступеней различного диаметра, поскольку он имеет только одну пару зажимных губок. Для транспортировки деталей различного диаметра этот захват необходимо переналаживать, что снижает его технологические возможности. Причем износ червячных пар привода снижает надежность работы захвата, что является серьезными недостатками этого устройства. Цель изобретения - расширение технологических возможностей и повышение надежности захвата. . Поставленная цель достигается тем, что ведущий элемент выполнен в виде 39 барабанного кулачка с двумя торцовыми рабочими поверхностями, взаимодействующими с соответствующими рыча гами кинематических цепей приводов зажимных губок, На фиг. 1 изображена кинематическая схема предлагаемого захвата, поперечный, разрез; на фиг. 2 - кинематическая схема захвата, вид сверху Предлагаемый захват промышленного робота содержит корпус 1, в котором смонтирован приводной вал 2. На наружном конце приводного вала жестко закреплена звездочка 3 которая кинематически, например с помощью цепной передачи, связана с приводом робота (не показан), Корпус 1 подвижно связан с механической рукой промышленного робота (не показан). Внут ри корпуса 1 на приводном валу 2 под вижно в осевом направлении, например на шлицах, смонтирован ведущий злемент, выполненный в виде барабанного кулака А, с торцовыми рабочими поверхностями 5 и 6, профиль которых выполнен в виде винтовых линий с тре буемым углом подъема. Для удержания барабанного кулака в среднем Ноложении с обеих сторон последнего концен рично приводному валу установлены две пружины 7 и 8, которые одними торцами упираются в ступицу барабанного кулака, а вторыми через упорные подшипники (не показаны) в корпус 1 захвата. Захват снабжен также двумя парами зажимных губок 9, 10 и 11, 12 которые кинематически связаны с приводным валом 2. Эта кинематическая связь выполнена для каждой пары зажимных губок раздельной и содержит две пары рычагов 13, It и 15, 16, которые соответственно жестко закреп лены на двух парах параллельных валиков 17, 18 и 19, 20, которые подвижно смонтированы в корпусе 1 и оснащены двумя парами зубчатых секторов 21, 22 и 23, 24, находящихся соответственно в постоянном зацепле.нии, так что вращение одного валика одной пары параллельных валиков вызывает вращение и второго валика это пары. На внутренних концах одних параллел1 ных валиков каждой пары Закрепле но по одному приводному рычагу 25 и 26, которые взаимодействуют соответственно с рабочими поверхностями 5 и б барабанного кулака, а на внут74ренних концах вторых валиков - по одному рычагу 27 и 28, которые слу)иат для крепления пружин 29..И 30, закрепленных своими вторыми концами на приводных рычагах 25 и 26 и служащих для разжатия зажимных губок. Работает предлагаемый захват промышленного робота следующим образом. Как только механическая рука промышленного робота совместит ось зажимных губок с осью детали 31 включается приводной двигатель зажимных губок (не показан), вращение от которого, например через цепную передачу (не показана;, передается звездочке 3, которая начинает вращать барабанный кулак . . При вращении барабанного кулака его рабочие поверхности 5 и 6 взаимодействуют .с приводными рычагами 25 и 2б, которые, отклоняясь этой поверхностью, поворачивают валики 17 и 20, Валики 17 и 20 через зубчатые сектора 21, 22 и 23, 2k поворачивают валики 18 и 19. Поворачиваясь, эти , валики с помощью зажимных губок 9, Ю и 11, 12 захватьшают и зажимают дет таль 31. Если деталь 31 имеет одинаковые шейки, за которые захватывают ее зажимные губки, то зажим прекращается и механическая рука робота перемещает ее на транспортер или на станок. После чего кулак А вращают в обратную сторону и происходит разжим детали, который осуществляется с помощью пружин 9 и 30, кЬторые поворачивают валики в обратном направлении. Если зал имные губки захватывают .деталь за шейки разного диаметра, то как только пара зажимных губок, например 9 и 10, коснется.шейки большего диаметра, их поворот совместно с их парой параллельных .валиков прекращается. Но так как кулак k будет продолжать вращаться, поскольку вторая пара зажимных губок еще не коснулась шейки детали 31, имеющей меньший диаметр, то приводной рычаг 25 будет служить барабанному кулаку k опорой, взаимодействуя с которой своей рабочей поверхностью, он начнет перемещаться вправо (по черте ; у) , поворачивая приводной рычаг 26 и сжимая при этом пружину 8, и следовательно будет продолжать поворачивать параллельные валики 19 и 20, сводя зажимные губки 1.1 и 12 до тех пор, пока они коснутся поверхности шейки
