Изобретение относится к захватным устройствам и может использоваться в конструкциях автоматических манипуляторов и промышленных роботов для автоматизации производственных процессов, а также в конструкциях роботов различного назначения для контроля и регулирования усилия зажима губок захвата.
Известен захват, содержащий корпус, зажимные губки, кинематически связанные посредством червячной передачи с валом привода, и датчик обратной связи по усилию, снабженный выходным валом.
Недостатком этого захвата является низкая надежность, связанная с необходимостью применения сложных планетарных передач.
Наиболее близким к предлагаемому по технической сущности является захват, снабженный двумя зубчатыми парами, каждая из которых выполнена в виде шестерни и ведущего колеса. При этом ведущее колесо одной пары жестко связано с валом привода. Шестерня этой пары жестко связана с выходным валом датчика, а ведущее колесо другой пары жестко связано с червячной передачей и через упругий элемент соединен с валом привода, шестерня этой пары жестко связана с корпусом датчика.
Недостатком этого захвата является невозможность адаптации положения губок по положению детали. Поэтому необходимо, чтобы продольная ось захвата точно совпадала с осью симметрии детали, так как в противном случае конструкция испытывает дополнительные нагрузки, ведущие к износу или к поломкам захвата. Кроме того, указанный захват осуществляет жесткий зажим детали, что может привести к ее повреждению в случае хрупкой или легко деформируемой конструкции детали. Это сужает технологические возможности захвата.
Цель изобретения расширение технологических и функциональных возможностей захватного устройства.
Для этого в захватном устройстве, содержащем корпус, на котором установлены захватные рычаги, кинематически связанные с валом привода, с губками, причем каждая губка выполнена в виде эластичной камеры, заполненной рабочей средой, а полости камер связаны посредством трубопровода и клапана и на каждом захватном рычаге дополнительно установлен зажимный элемент, выполненный в виде одноплечего рычага, один конец которого шарнирно установлен на захватном рычаге, а другой связан с рабочей поверхностью соответствующей эластичной камеры, при этом трубопровод соединен с дополнительно введенными измерителем давления и расходомером рабочей среды.
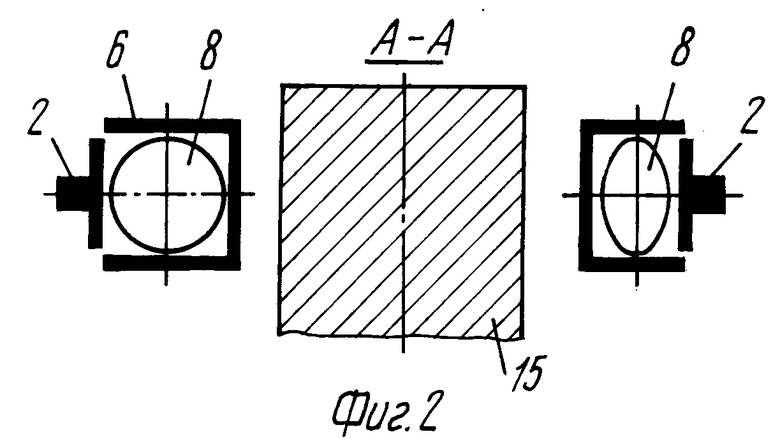
На фиг. 1 изображено предлагаемое захватное устройство, общий вид; на фиг.2 сечение А-А на фиг.1.
Захватное устройство содержит корпус 1, захватные рычаги 2, кинематически связанные с валом привода 3, и червячную передачу 4, установленную в корпусе 1 на подшипниках 5. Захватные рычаги 2 содержат зажимные элементы 6, выполненные в виде одноплечих рычагов, закрепленных на концах захватных рычагов 2 с помощью шарниров 7. Зажимные элементы 6 опираются на губки, выполненные в виде эластичных (резиновых) камер 8, заключенных в гибкие (капроновые) сетки 9, плотно облегчающие камеры 8 и приклеенные к ним. Внутренние полости эластичных камер 8 сообщаются между собой трубопроводом 10. Трубопровод 10 разделен управляемым клапаном 11, подключенным к узлу управления 12 захватным устройством. Кроме того, к трубопровод 10 подключены измеритель давления 13 и измеритель расхода рабочей среды 14, выходы которых поданы на узел управления 12. Рабочие полости эластичных камер 8 и трубопровод 10 заполнены рабочей средой (воздухом или газом). Деталь 15 подлежит захвату и переносу в позицию загрузки. При этом ось симметрии Б-Б детали 15 смещена относительно продольной оси захвата В-В на величину смещения Г.
Предлагаемое захватное устройство работает следующим образом.
В исходном положении захватные рычаги 2 разведены и захватное устройство надвигается на деталь 15. При этом продольная ось В-В захватного устройства смещена относительно оси Б-Б детали 15 на некоторую величину смещения Г. Эластичные камеры 8 находятся в свободном состоянии и заполнены одинаковым объемом воздуха. Вал привода 3 через червячную передачу 4 сводит захватные рычаги 2, сжимая деталь 15. При этом зажимной элемент 6 правого захватного рычага (см. фиг.1) касается детали 15 раньше зажимного элемента левого рычага, что приводит к сдавливанию правой эластичной камеры 8 между захватным рычагом 2 и зажимным элементом 6. Воздух из этой камеры по трубопроводу 10 (клапан 11 при этом открыт) поступает в левую эластичную камеру 8. Сетка 9 противодействует раздуванию эластичных камер 8. Положение зажимных элементов 6 адаптируется по положению детали 15. Наличие эластичных камер снижает жесткость захвата, предохраняя деталь 15 от повреждения. Усилие зажима может контролироваться измерителем давления 13, а величина смещения Г (расцентровки) детали 15 относительно продольной оси В-В захвата может контролироваться измерителем расхода 14 воздуха, поступающего из правой эластичной камеры 8 в левую.
После зажима захватное устройство устанавливается в позицию загрузки и узел управления 12 при этом учитывает величину смещения Г при определении точки загрузки детали 15, что повышает точность работы захватного устройства. Вал привода 3 разводит захватные рычаги 2, освобождая деталь 15. При этом до освобождения детали 15 узел управления 12 закрывает клапан 11, разъединяя внутренние полости эластичных камер 8. Это позволяет запомнить пространственное положение зажимных элементов 6, что необходимо, например, в следующем случае: деталь 15 после переноса ее захватным устройством обрабатывается и должна быть возвращена в позицию ее первоначального захвата, где устанавливается со смещением Г относительно оси В-В захватного устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЗАХВАТНОЕ УСТРОЙСТВО | 1991 |
|
RU2022781C1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1991 |
|
RU2022777C1 |
| МАНИПУЛЯТОР | 1992 |
|
RU2022772C1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1991 |
|
RU2022779C1 |
| Захват манипулятора промышленного робота | 1990 |
|
SU1745542A1 |
| Захватное устройство | 1986 |
|
SU1421530A1 |
| Схват | 1983 |
|
SU1079429A1 |
| МАНИПУЛЯТОР | 1991 |
|
RU2022769C1 |
| Захват манипулятора | 1979 |
|
SU844262A1 |
| Адаптивный захватный модуль промышленного робота | 1989 |
|
SU1689063A1 |
Использование: в конструкциях автоматических манипуляторов и промышленных роботов. Сущность изобретения: захватное устройство содержит корпус 1 и рычаги 2, 8, кинематически связанные с валом привода 3. Внутренние зажимные элементы 6 выполнены в виде консольных рычагов, закрепленных шарнирно на концах рычагов 2 и опираются на силовые эластичные камеры 8. Вал привода 3 сводит рычаги 2, зажимая деталь 15. При этом положение зажимных элементов 6 адаптируется по положению детали 15. Наличие силовых эластичных камер 8 снижает жесткость захвата, предохраняя деталь 15 от повреждения. 2 ил.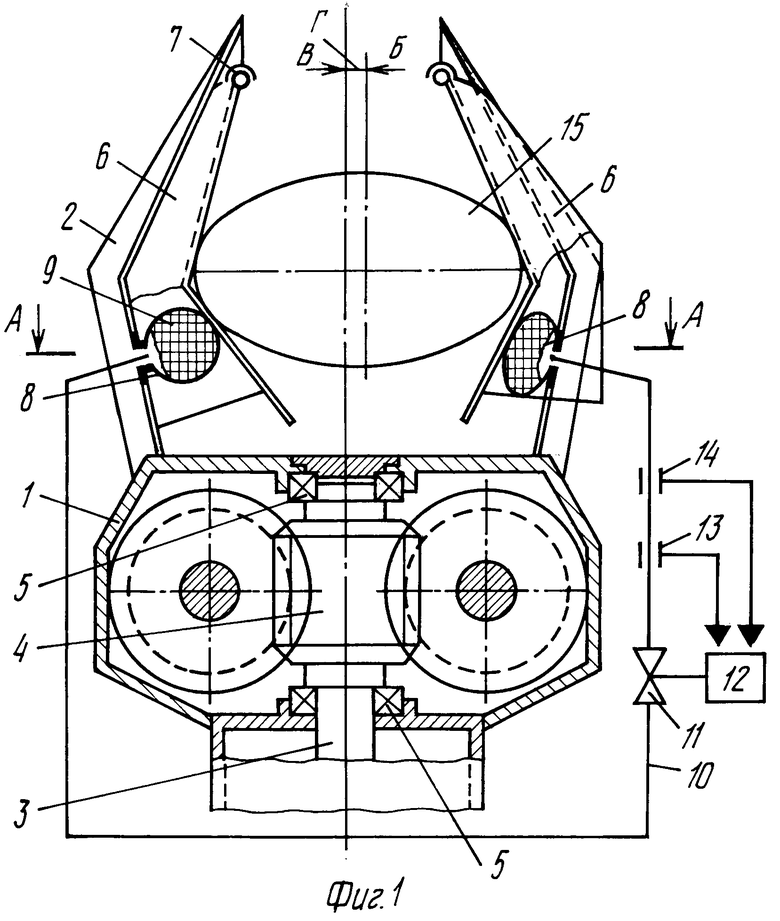
ЗАХВАТНОЕ УСТРОЙСТВО, содержащее корпус, на котором установлены захватные рычаги, кинематически связанные с валом привода, с губками, причем каждая губка выполнена в виде эластичной камеры, заполненной рабочей средой, при этом полости камер связаны между собой посредством трубопровода и клапана, отличающееся тем, что, с целью расширения технологических и функциональных возможностей, на каждом захватном рычаге дополнительно установлен зажимной элемент, выполненный в виде одноплечего рычага, один конец которого шарнирно установлен на захватном рычаге, а другой связан с рабочей поверхностью соответствующей эластичной камеры, при этом трубопровод соединен с дополнительно введенными измерителем давления и расходомером рабочей среды.
| Захват | 1973 |
|
SU515637A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
