Jz4
| название | год | авторы | номер документа |
|---|---|---|---|
| Двухместное захватное устройство | 1986 |
|
SU1316815A1 |
| Схват | 1981 |
|
SU921852A1 |
| Захватное устройство | 1986 |
|
SU1421530A1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ЦИЛИНДРИЧЕСКИХ ИЗДЕЛИЙ ТИПА ЧЕРВЯЧНЫЙ ХОМУТ И ПОЛУАВТОМАТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2445180C1 |
| Автооператор | 1985 |
|
SU1283035A1 |
| Схват манипулятора | 1981 |
|
SU965655A1 |
| ЧЕРВЯЧНАЯ ПЕРЕДАЧА, СПОСОБ ЕЕ ИЗГОТОВЛЕНИЯ, ОБОРУДОВАНИЕ И ИНСТРУМЕНТ ДЛЯ ЕЁ ВЫПОЛНЕНИЯ | 1998 |
|
RU2200262C2 |
| Устройство для подготовки радиоэлементов с осевыми выводами к монтажу | 1986 |
|
SU1370805A2 |
| Устройство для комплектования пакета дисковых заготовок с технологическими прокладками | 1977 |
|
SU738821A1 |
| Устройство для запечатывания пакетов из термосклеивающейся пленки | 1984 |
|
SU1191360A1 |


Изобретение относится к машиностроению и, в частности, к захватным устройствам манипуляторов и промышленных роботов. Цель изобретения - повышение надежности работы захватного устройства за счет установки механизма, позволяющего подключать и отключать захватные органы к основному приводу. Двухместное захватное устройство имеет корпус 1, в котором размещена поворотная часть 3. В поворотной части 3 установлен ведущий вал 5 с зубчатым колесом 6 и ведомые валы 7, на каждом из которых с возможностью возвратно-поступательного перемещения установлены зубчатые колеса 9. На зубчатых колесах 9 установлены поводки 10 с роликами 12. Ролики 12 находятся в контакте с торцовыми поверхностями основного 14 и дополнительного 37 кулачков. Дополнительный кулачок 37 снабжен приводом 38 его вращения. Перед вращением поворотной части 3 дополнительный кулачок 37 устанавливается в положение, при котором впадины основного кулачка 14 не совпадают с впадинами дополнительного кулачка 37. После установки поворотной части 3 в рабочее положение включается привод 38 дополнительного кулачка 37. Поворотом дополнительного кулачка 37 добиваются совпадения впадин основного 14 и дополнительного 37 кулачков под роликом 12 поводка 10 того из зубчатых колес 9, которое необходимо ввести в зацепление с зубчатым колесом 6 ведущего вала 5. 6 ил.
37
го
новному приводу. Двухместное захватное устройство имеет корпус 1, в котором размещена поворотная часть 3. В поворотной части 3 установлен ве- ДУ1ЦИЙ вал 5 с зубчатым колесом 6 и ведомые валы 7, на каждом из которых с возможностью возвратно-поступательного перемещения установлены зубчатые колеса 9. На зубчатых колесах 9 установлены поводки 10 с роликами 12. Ролики 12 находятся в контакте с торцовыми поверхностями основного 14 и дополнительного 37 кулачков. Дополнительный кулачок 37 снабжен приводом 38 его вращения. ПеИзобретение относится к машиностроению, в частности к захватным устройствам манипуляторов и промьшшен- ных роботов, и является усовершенствованием изобретения по авт. св. № 1316815.
Целью изобретения является повышение надежности работы захватного устройства за счет установки механизма, позволяющего подключить и отключить захватные органы к основному приводу.
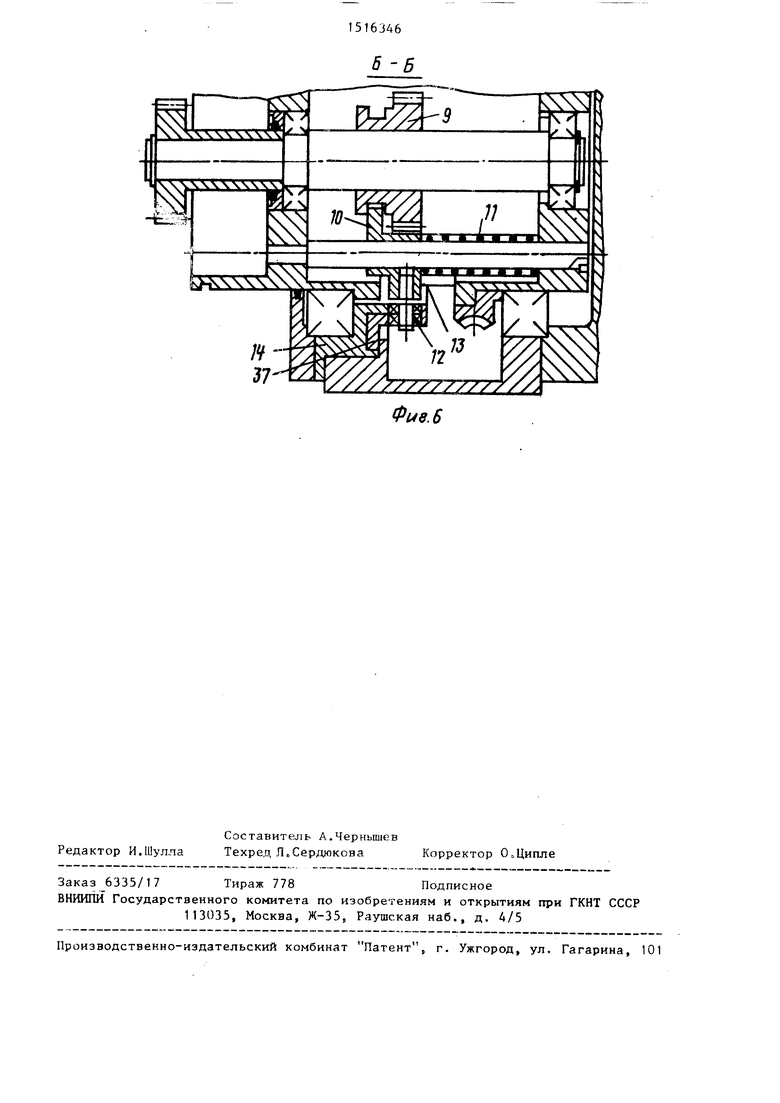
На фиг.1 изображена схема двухместного захватного устройства; на фиг.2 - схема захватного органа; на фиг.З - осн лвной и дополнительньй кулачки, общий вид; на фиг.4 - захват, разрез;, на фиг. 5 -- сечение А-Л на фиг.4; на фиг.6 - сечение Б-Б на фиг. 5
Двухместное захватное устройство состоит из неподвижного корпуса 1, в котором на подшипниках 2 размещается поворотная часть 3, имеющая байонет- ный разъем 4 для присоединения двухместного захва1ного органа. В поворотной части расположено распределительное устройство, состоящее из ведущего вала 5 с зубчатым колесом 6. На выходных г.онцах ведомых валов .7 расположены зубчатые колеса 8 и подвижные ведомые зубчатые колеса 9, которые охвачены вилками поводков 10, односторонне поджимаемыми пружинами 11. Поводки оснащены выходными концами с роликами 12, выступающими из поворотной части через продольные прорези 13. Ролики 12 находятся в контакте с торцовым кулачком 14, жестко связанным с корпусом. Ведущий вал
ред вращением поворотной части 3 дополнительный кулачок 37 устанавливается в положение, при котором впадины основного кулачка 1А не совпадают с впадинами дополнительного кулачка 37. После установки поворотной части 3 в рабочее положение включается привод 38 дополнительного кулачка 37. Поворотом дополнительнох о кулачка 37 добиваются совпадения впадин основного 14 и дополнительного 37 кулачков под роликом 12 поводка 10 того из зубчатых колес 9, которое необходимо ввести в зацепление с зубчатым колесом 6 ведущего вала 5. 6 ил.
5
0
0
5
0
5
распределительного устройства получает движение от вала 15 через коьги- ческую пару 16 в том случае, если привод схвата осуществляется без контроля нагрузки. Для обеспечения возможности разжима схвата предусмотрены муфты 17 предельного момента и обгонная муфта 18. Поворот схвата осуществляется от вала 19 через беззазорную червячную пару 20, Ведущее зубчатое колесо 21 приводного механизма зах1 атного органа злкреплено на валу 22, расположенном Е корпусе 23. Ведущие зубчатые колеса предиазначе- ны для зацепления с выходными зубчатыми колесами 8 поворотной головки и передачи крутящего момента через вал 22 на червяк 24, последний закреплен на валу 22 с в&аможнос-тью осевого перемещения и представляет собой сдвоенньш червяк, одна половина которого имеет правую нарезку, а другая . Прочие параметры червяков идентичны. В сопряжении с половинами червяка находятся червячные секторы 25 и 26, являющиеся частями червячных колес. Указанные червячные секторы жестко закреплены на валах 27 и 28, на концах которых расположены зубчатые колеса 29-32 с винтовыми зубьями, которые жестко связаны с губками 33-36 схвата соо-:Бетственно. Колеса 29 и 32 жестко связаны с соответствующими валами, а колеса 31 и 30 - с возможностью свободного вращения относительно в.ала. Зубчатые колеса 29-32 выполнены косозубыми для регулирования положения оси захватывае- мой детали путем осевого смещения
5
зубчатых колес одно относительно другого.
Дополнительное устройство состои из дополнительного кулачка 37, расположенного на цилиндрической части основного кулачка 14 и привода 38 дополнительного кулачка.
Двухместное захватное устройство работает следующим образом.
Перед вращением поворотной части 3 дополнительный кулачок устанавливается в нейтральное положение. При этом все впадины кулачка 14 перекрываются торцом кулачка 37 и оба колеса 9 оказьтаются не соединенными с колесом 6. Вращением вала 19 через червячную пару 20 поворачивается поворотная часть 3 с двухместным захватным органом. При этом поводки 10 связанные с колесами 9, вращаясь совместно с поворотной частью 3, перекатываются роликами 12 по кулачкам
14и 37, неподвижным относительно корпуса, не допускающим подключение колес 9 к колесу 6, а губки 33-36 сказываются отключенными от вала 5. Если губки в это время удерживают деталь, то их состояние не меняется вследствие наличия в двухстороннем схвате самотормозящего элемента - червячной пары. После прекращения вращения части 3 поворотом дополнительного кулачка 37 совмещаются впадины кулачков 37 и 14 против ролика 12 того из поводков, который необходимо йключит.. Включение привода осуществляется пружиной 11, прижимающей ролик 12 поводка до контакта с пониженным участком кулачков 14 и
.37, тем самым исключая аварийную ситуацию при совпадении торцов сопряженных зубчатых колес 9 и 6, что неизбежно при вводе в зацепление непосредственно кулачком при кинематическом замыкании.
При зажиме заготовки крутящий момент через зубчатую пару 16 от вала
15передается через муфту 17 предельного момента при незаклиненной обгонной муфте 18. При разжиме заготовки крутящий момент передается параллельно через обе муфты, обеспечивающие
в этом случае приложение большего по величине момента, необходимого для страгивания самотормозящих пар Если же привод обеспечивает вращение с
163466
контролируемым моментом, то муфты 17 и 18 могут быть исключены из конструкции.
Деталь, например, ступенчатая за- хватывается губками 33-36, жестко связанными с зубчатыми колесами 29- 32, которые получают крутящий момент при вращении зубчатого колеса 21. При
1Q этом крутящий момент передается через вал 22, червяк 24 на червячные колеса 25 и 26. Вследствие этого червячное колесо 25 приводит в движение пару губок 33 и 34, связанных с коле15 сами 29 и 30, а червячное колесо 26 - пару губок 35 и 36 с колесами 31 и 32. Если одна из пар губок приходит в соприкосновение с заготовкой, а вторая еще нет, то первая пара губок и
20 соответствующее червячное колесо прекращают движение. В результате этого червяк 24, вывинчиваясь из остановившегося червячного колеса, перемещается вдоль оси. При этом вто25 рое червячное колесо вращается быстрее, быстрее смыкая вторую пару губок. Все эти перемещения совершаются без нагрузки, в результате чего силы трения незначительны, поэтому мало
30 влияют на работу схвата и износ не- . значителен.
После смыкания обоих пар губок
осевое перемещение червяка прекраJ
щаетч:я, и при дальнейшем вращении 35
червяка в сопряженных губках с деталью обеспечивается необходимое усилие, после чего двигатель привода, передающий вращение на вал 15 (фиг.1),
40
отключается.
Формула изобретения
Двухместное захватное устройство по авт. св. № 1316815, отличающееся тем, что, с целью повышения надежности работы, оно снабжено дополнительным кулачком, установленным соосно с основным кулачком и пов- торяющим форму основного кулачка,
при этом дополнительный кулачок снабжен вновь введенным приводом его вра- щения относительно основного кулачка, а ролики поводков имеют возмож55
ность взаимодействия с вкладьш1ами основного и дополнительного кулачков при их совпадении.
1 /V 12 /3
ФигЛ
;v
J7
ZJ
Фие.1
37
.6
| Двухместное захватное устройство | 1986 |
|
SU1316815A1 |
