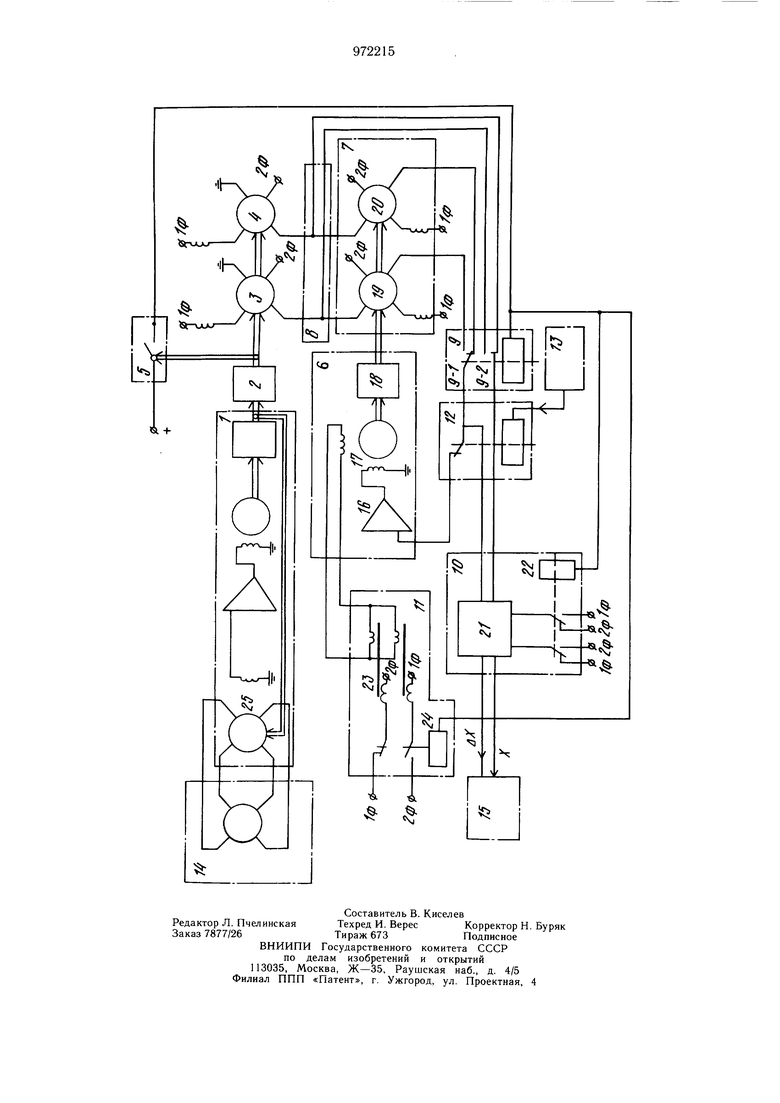
маторов, роторы которых соединены с общим валом, а статоры взаимно развернуты на 180°. На чертеже представлена схема устройства. Устройство содержит следящую систему 1, связанную через редуктор 2 с передаточным числом 1:2 с линейными вращающимися трансформаторами (ЛВТ) 3 и 4 и датчиком 5 фазы, механизм 6 остановки, связанный механически с блоком 7 запомийания значения входного параметра в момент подачи команды, сумматор 8, входы которого подключены к выходам ЛВТ 3 и 4 и блока 7, первый коммутатор 9, к входам которого подключены выходы сумматора 8 и блока 7. Устройство содержит также первый 10 второй II блоки изменения фазы и второй коммутатор 12. Выход датчика 5 фазы подключен к управляющим входам блоков 10 и 11 изменения фазы и первого коммутатора 9. Выход второго блока 11 изменения фазы подключен к первому входу механизма 6 остановки, второй вход которого подключен к выходу второго коммутатора 12. Выход первого коммутатора 9 одновременно подключен к входу первого блока 10 изменения фазы и входу второго коммутатора 12, управляющий вход которого подключен к пульту оператора 13. Вход следящей системы 1 подключен к датчику параметра 14, а выходы первого блока 10 изменения фазы подключены к регистрирующей аппаратуре 15. Механизм 6 остановки выполнен в виде следящей системы, состоящей из усилителя 16, двигателя 17 и редуктора 18. Блок 7 запоминания значения параметра в момент подачи команды состоит из ЛВТ 19 и 20. Роторы ЛВТ 19, 20 и 3, 4 попарно соединены общими валами, а статоры ЛВТ, имеющие общий вал, развернуты друг относительно друга на 180°. Роторные обмотки ЛВТ 19, 3 и 20,4 соединены попарно последовательно, обеспечивая суммирование сигналов соответствующих ЛВТ. Первый коммутатор 9 состоит из реле, к подвижным контактам 9-1 которого подключены концы выходных роторных обмоток ЛВТ 19 и 20, а концы выходных роторных обмоток ЛВТ 3 и 4 подключены к неподвижным контактам 9-2 того же реле. Подвижный контакт 9-1 реле первого коммутатора 9 подключен одновременно к подвижному контакту реле второго коммутатора 12 и первому входу двухканального фазочувствительного выпрямителя (ФЧВ) 21, входящего в состав первого блока изменения фазы 10. Ко второму входу ФЧВ 21 подключен неподвижный контакт 9-2 реле первого коммутатора 9. Кроме ФЧВ 21 первый блок 10 изменения фазы содержит реле 22, переключающие контакты которого включены в цепи питания ФЧВ 21. Второй блок 11 изменения фазы состоит из трансформатора 23 и реле 24. Вторичная обмотка трансформатора 23 подключена к обмотке возбуждения двигателя 17 механизма 6 остановки, а первичные обмотки одними концами через переключающие контакты реле 24 подключены к первой и второй фазам источника питания переменного тока, а другими концами подключены постоянно ко второй и первой фазам того же источника соответственно. Датчик 5 фазы состоит из микропереключателя, подвижный контакт которого связан посредством кинематической линии, выполненной, например, в виде кулачка, с выходным валом редуктора 2. Второй коммутатор 12 состоит из реле, размыкающий контакт которого включен в цепь между подвижным контактом 9-1 реле первого коммутатора 9 и входом усилителя 16 механизма б остановки, а обмотка подключена к пульту оператора 13. Выходы ФЧВ 21 первого блока изменения фазы 10 подключены к регистрирующей аппаратуре 15, роторные обмотки входного вращающегося трансформатора 25 следящей системы 1 подключены к обмоткам вращающегося трансформатора датчика 14 параметра. Устройство работает в двух режимах: в режиме регистрации параметра и в режиме регистрации вариации параметра. В режиме регистрации параметра устройство работает следующим образом. При отсутствии входного параметра X подвижный контакт микропереключателя датчика фазы 5 находится в разомкнутом состоянии, а роторы ЛВТ 3 и 19 находятся относительно статоров в положении, соответствующем Началу линейного участка характеристики (-90°). Роторы ЛВТ 4 и 20 в это время находятся относительно статоров в положении, соответствующем началу Нелинейного участка характеристики ( + 90°), т. е. их статоры развернуты относительно статоров ЛВТ 3 и 19 На 180°. При поступлении сигнала, пропорционального входному параметру X от датчика параметра, на первичные обмотки входного вращающегося трансформатора 25 следящей системы 1 выходной вал следящей системы 1 поворачивается на угол, пропорциональный входному параметру, а ЛВТ 3 и 4 поворачиваются На половину этого угла, так как передача идет через редуктор 2 с передаточным числом 1:2. Преобразованный сигнал, пропорциональный входному параметру, поступает с выходной обмотки ЛВТ 3 через контакты 9-2 реле первого коммутатора 9 на вход ФЧВ 21 первого блока изменения фазы 10 и с выхода ФЧВ 21 в регистрирующую аппаратуру. Одновременно сигнал рассогласования положений следящей системы I и следящей системы механизма б остановки поступает с обмотки -ЛВТ 19 через контакты 9-1 первого коммутатора 9 и размыкающий контакт реле второго коммутатора
12 йа вход усилителя 16 следящей системы механизма остановки. Двигатель 17 отрабатывает этот сигнал и поворачивает выходной вал механизма остановки, и, следовательно, вал блока 7 на угол, равный углу разворота выходного вала редуктора 2. При изменении параметра X на величину одного цикла изменения (например, курса на 360°) выходной вал следящей системы 1 поворачивается на 360°, а Л ВТ 3,4 и 19,20 поворачиваются На 180°, причем ЛВТ 3 и 19 достигают конца линейного участка характеристики ( + 90°), а ЛВТ 4 и 20 - конца нелинейного участка характеристики. При этом подвижный контакт микропереключателя датчика 5 фазы: замыкается и подает питание на обмотки реле первого коммутатора 9, реле 22 первого блока 10 изменения фазы и реле 24 второго блока 11 изменения фазы. Реле первого коммутатора 9 переключает свои контакты, отлючает обмотку ЛВТ 3 от первого входа ФЧВ 21 и подключает обмотку ЛВТ 4. Таким образом обеспечивается развертывание второго цикла изменения параметра X по линейному участку характеристики. Одновременно происходит коммутация питания ФЧВ 21, что позволяет сохранить правильную полярность регистрируемого параметра, и происходит коммутация питания трансформатора 23 второго блока 11 изменения фазы, что обеспечивает устойчивую работу следящей системы механизма 6 остановки. Устройство готово к регистрации параметра X, изменяющегося по новому циклу (например, курс более 360°).
В режиме регистрации вариации параметра устройство работает следующим образом.
При поступлении команды от пульта оператора «Режим вариации параметра срабатывает реле второго коммутирующего устройства 12 и своими размыкающими контактами разрывает входную цепь усилителя 16, останавливая двигатель 17 следящей системы механизма 6 остановки. Роторы ЛВТ 19
и 20 останавливаются относительно статоров в положениях, соответствующих значению параметра в момент подачи команды «Режим вариации параметра, а роторы ЛВТ 3 и 4 поворачиваются двигателем следящей системы 1 на углы, пропорциональные текущему значению параметра X. Так как роторные обмотки ЛВТ 3, 19 и 4,20 соединены встречно соответственно, то с концов обмотки ЛВТ 19 или 20 (в зависимости от положения микропереключателя датчика фазы 4) через контакты 9-2 реле первого коммутатора 9 на второй вход ФЧВ 21 первого блока 10 изменения фазы и с выхода
ФЧВ 21 в регистрирующую аппаратуру поступает сигнал вариации параметра ЛХ.
Предлагаемое устройство обеспечивает выработку вариации параметра в диапазоне ± 50% от полного диапазона измеряемого параметра, что в 5 раз больще возможностей прототипа по этой характеристике.
Формула изобретения
. Устройство для формирования сигнала регисфрируемого параметра, представленного углом поворота ротора вращающегося трансформатора, содержащее следящую систему, вход которой связан с выходными обмотками вращающегося т.рансформатора, механизм остановки, соединенный с блоком запоминания значения входного параметра, выход которого через сумматор соединен с входом коммутатора, отличающееся тем, что, с целью расширения диапазона формирования сигнала, пропорционального вариации входного параметра относительно его фиксированного значения, в него введены редуктор с передаточным
5 числом 1:2, установленный на выходе следящей системы, датчик фазы, механически связанный с выходным валом редуктора, второй коммутатор, два блока изменения фазы и два линейных вращающихся трансформатора, роторы которых соединены с
0 выходным валом редуктора, статоры развернуты один относительно другого на 180°, а выходные роторные обмотки через сумматор соединены с входом первого коммутатора, при этом выход датчика фазы подключен к управляющим входам первого Коммутатора и блоков изменения фазы, вход первого блока изменения фазы подключен к выходу первого коммутатора, а входы механизма остановки соединены с выходом второго блока изменения фазы и через второй
0 коммутатор с выходом первого коммутатора.
2. Устройство по п. I, отличающееся тем, что блок запоминания значения входного параметра выполнен в виде двух линейных вращающихся трансформаторов, роторы которых соединены общим валом, а статоры взаимно развернуты на 180°.
Источники информации, принятые во внимание при экспертизе 0 1. Патент ФРГ № 1266991, кл. 42 d 3/10, опублик. 1968.
2. Авторское свидетельство СССР № 413381, кл. G 01 D 9/10, 1972 (прототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВЕТРА С БОРТА ДВИЖУЩЕГОСЯ КОРАБЛЯ | 1972 |
|
SU328390A1 |
| Устройство для задания угла поворота | 1979 |
|
SU849269A1 |
| СЛЕДЯЩАЯ СИСТЕМА | 1972 |
|
SU326546A1 |
| Функциональный преобразователь | 1975 |
|
SU732911A1 |
| Следящий привод | 1978 |
|
SU697965A1 |
| БЕСКОНТАКТНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА | 2012 |
|
RU2482596C1 |
| Электромеханический интегратор | 1976 |
|
SU604007A1 |
| ИМИТАТОР ДЛЯ ОБРАБОТКИ КАНАЛА ПЕЛЕНГАЦИИ РАДИОЛОКАЦИОННЫХ СТАНЦИЙ | 1970 |
|
SU1840956A1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ ВЗАИМНОГО ПОЛОЖЕНИЯ СУДОВ ПРИ ГРУЗОПЕРЕДАЧЕ ТРАВЕРЗНЫМ СПОСОБОМ | 1971 |
|
SU428978A1 |
| Следящая система для отработки арктангенсной функции | 1973 |
|
SU488223A1 |