1
Изобретение относится к машиностроению и может быть использовано в различных автоматических манипуляторах и промышленных работах с пневмо- и гидроприводом/
Известны различные конструкции гидроцилиндров телескопического типа, например гидроцилиндр, содержащий больший поршень с полым штоком, в котором установлен подвижно малый поршень с полым штоком
Однако указанный цилиндр имеет относительно большие габариты,
Наиболее близкой к предлагаемому по технической сущности является руka манипулятора, содержащая корпус, направляющие и привод , причем привод может быть выполнен как известный, указанный выше 2,
Однако известная рука имеет большие габариты и сложную конструкцию,
Цепь изобретения - сокращение габаритов и упрощение конструкции руки манипулятора.
Указанная цель достигается тем, что в корпусе руки выполнены глухие полости под направляющие, а направляющие выполнены в виде телескопических трубок, причем внутренняя полость одной направляющей связана с глухой полостью большего штока, а внутренняя полость второй направляю1 ей - с его не глухой полостью.
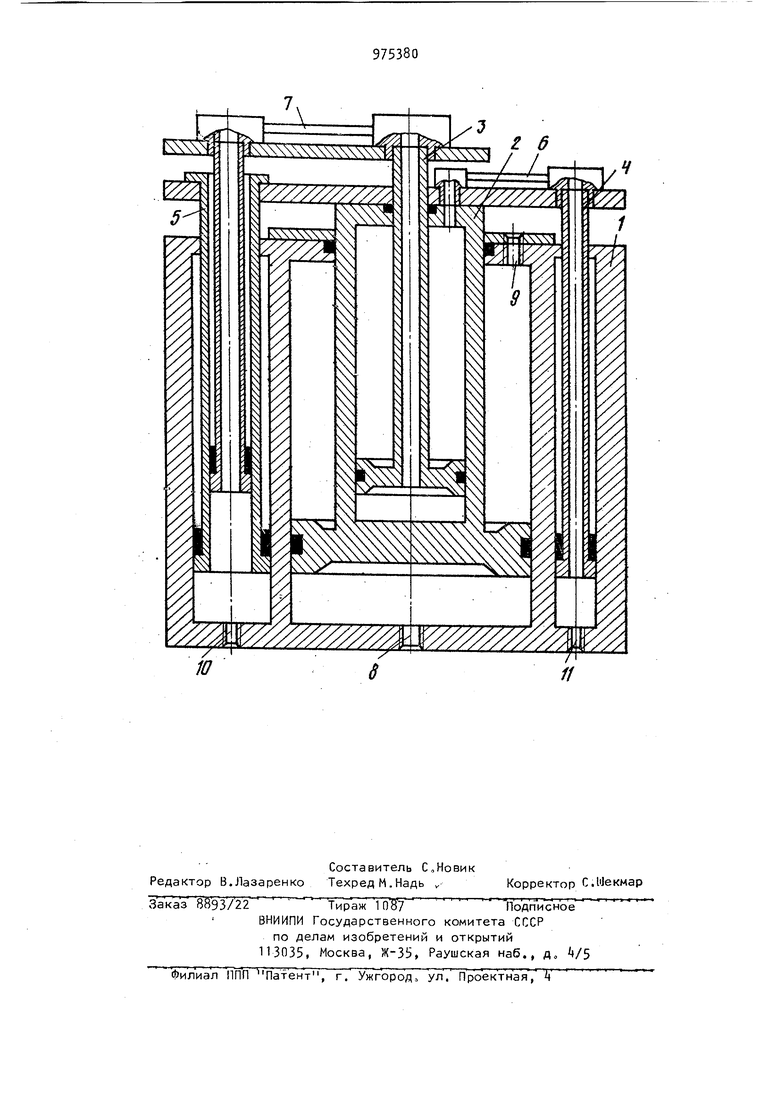
На чертеже схематично показана предлагаемая рука манипулятора.
Рука манипулятора содержит неподвижный корпус 1, в котором установ,5 лен больший поршень с полым большим штоком 2, внутри которого размещен малый поршень с малым штоком 3, в котором выполнен канал для подвода рабочей среды в глухую полость полого штока 2, В корпусе параллельно оси большего и малого поршней установлены жесткие направляющие и 5, выполненные в виде телескопических трубок для обеспечения осевой жест397кости руки и для подвода рабочей ереды через патрубки 6 и 7 в рабочие полости выдвигающихся элементов руки. Корпус 1 снабжен отверстиями 8 и 9 для подвода рабочей среды в поршневую и штоковую полости большого силового цилиндра,, а также отверстиями 10 и 11 для подвода рабочей среды 3 направляющие 4 и 5. Рука манипулятора работает следуюцим образом Для установки штока 3 в первое рабочее (исходное) положение, рабочая среда подается через отверстия 9 и 11 (рука втянута). Для перевода руки во второе положение-.рабочая среда подается через отверстия 8 и 11, при этом происходит выдвижение штока 2 большего силового цилиндра, В третье рабочее положение рука переводится путем подачи рабочей ереды через отверстия 8 и 10, при этом выдвигается больший шток 2 и малый шток 3, рука вытянута полностью Для установки руки в четвертое положение рабочая среда подается через отверстия 9 и 10, при этом шток 3 выдайнут, а шток 2 втянут Телескопические трубки направляющих 4 и 5 выдвигаются и втягиваются совместно со штоками 2 и Зо При установке в корпусе 1 дополнительных телескопических трубок может быть осуществлен подвод рабочей среды к исполнительному элементу руки, например к захвату (не показан). Таким образом, предлагаемая рука манипулятора при малых габаритах неподвижного звена обеспечивает четыре „ фиксированных положения конца штока малого поршня и требуемую простоту управления приводом всех звеньев, что, особенно важно как для сокращения габаритов в манипуляторе при обеспечении требуемых функциональных возможностей, так и для сокращения технологических площадей, занимаемых комплексом, в состав которого входит рука манипулятораФормула изобретения Рука манипулятора, содержащая корпус, направляющие и привод, например, в виде телескопического силового цилиндра, в большом читоке которого смонтирован малый шток с поршнем, имеющий сквозной продольный канал для подвода рабочей среды в глухую полость большого штока, о т л и ч а ю щ а я с я тем, что, с целью сокращения габаритов и упрощения конструкции, в корпусе выпопнены глухие полости под направляющие, а направляющие выполнены в виде телескопических трубок, причем внутренняя полость одной направляющей связана с глухой полостью большого штока, а внутренняя полость второй направляющей - с его неглухой полостью. Источники информации. принятые во внимание при экспертизе 1 Авторское свидетельство СССР fP 2178(3, кл„ F 15 В 15/16, 1966 2. Авторское свидетельство СССР К 98157, кл„ В 25 J 19/00, 1974
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРОЦИЛИНДР | 2001 |
|
RU2219385C2 |
| ГИДРОЦИЛИНДР | 2001 |
|
RU2219384C2 |
| ГИДРОЦИЛИНДР | 2001 |
|
RU2219386C2 |
| ГИДРОЦИЛИНДР | 2001 |
|
RU2219381C2 |
| Манипулятор | 1985 |
|
SU1265041A1 |
| ГИДРОЦИЛИНДР | 2001 |
|
RU2219382C2 |
| ГИДРОЦИЛИНДР | 2001 |
|
RU2219383C2 |
| УСТРОЙСТВО ДЛЯ ПОШТУЧНОЙ ВЫДАЧИ ЗАГОТОВОК | 1990 |
|
RU2023572C1 |
| Манипулятор | 1979 |
|
SU837857A1 |
| Манипулятор к прессу | 1986 |
|
SU1339011A1 |