(54) УСТРОЙСТВО УПРАВЛЕНИЯ СУДОВОЙ СХОДНЕЙ

| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического управления роторным конвейером | 1986 |
|
SU1361506A1 |
| Дистанционный привод управления главным судовым двигателем /варианты/ | 1983 |
|
SU1191357A1 |
| Система управления и защиты судовой газотурбинной установки | 1991 |
|
SU1823852A3 |
| Устройство для программного управления самовозвратным исполнительным механизмом | 1980 |
|
SU957175A1 |
| Устройство для управления про-цЕССОМ ОСушЕНия СТОчНыХ КОлОдцЕВНА СудНЕ | 1979 |
|
SU796058A2 |
| ДИСТАНЦИОННЫЙ ПРИВОД УПРАВЛЕНИЯ СУДОВЫМ ДВИГАТЕЛЕМ | 2003 |
|
RU2238880C1 |
| Устройство для управления судовым агрегатом | 1975 |
|
SU596995A1 |
| Пневматическая логическая система управления | 1971 |
|
SU881717A1 |
| Устройство для управления судовой дистилляционной установкой | 1987 |
|
SU1497113A1 |
| Устройство для управления прижимом магнитной ленты к ведущему валу | 1983 |
|
SU1152030A1 |
1
.Изобретение относится к судостроению, в частности, к устройствам управления судовой сходней.
Известно устройство управления судовой сходней, содержащее задатчик режимов работы, связанный с исполнительными ме- 5 ханизмами перемещения секции сходни и ее стопора, и датчики положений секции сходни и стопора, соединенные с соответствующими сигнализаторами 1.
Недостатком известного устройства явля- Q ется недостаточная надежность его работы.
Цель изобретения - повыщение надежности работы устройства.
Поставленная цель достигается тем, что устройство снабжено первым и вторым ло- 5 гическими элементами И, один из входов которых выполнен инверсным, и первым и вторым логическими элементами ЗАПРЕТ, причем первый прямой вход первого элемента И подключен к первому выходу задатчи- 2о ка режимов работы, второй прямой вход этого же элемента - к выходу первого датчика положения стопора, инверсный 1ХОД - к выходу первого датчика положения секции сходни, а выход - к исполнительному механизму перемещения секции сходни, первый элемент ЗАПРЕТ подключен своим прямым входом к первому выходу задатчика режимов работы,инверсным входом - к выходу первого датчика положения стопора, а выходом - к исполнительному механизму перемещения стопора, второй элемент ЗАПРЕТ подключен своим прямым входом к второму выходу задатчнка, режимов работы, инверсным входом - к выходу второго датчика положения секции сходни, а выходом - к первому прямому входу второго элемента И и к исполнительиому механизму перемещения секции сходни, при этом второй прямой вход второго элемента И соединен с выходом второго датчика положения секции сходни, инверсный вход этого же элемента - с выходом второго датчика положения стопора, а выход - с исполнительым механизмом перемещения стопора.
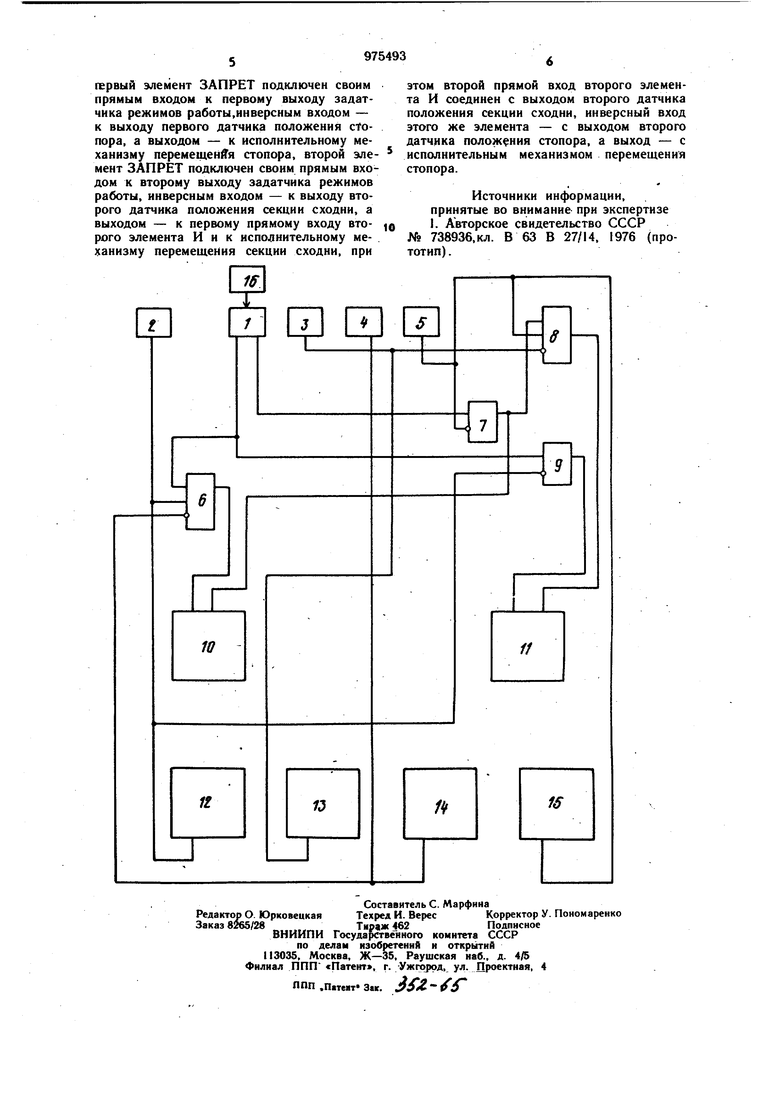
На чертеже представлена функциональная схема устройства управления судово сходней.
-Устройство содержит задатчик I режимов работы, сигнализаторы 2-5 положений секции сходни и стопора (сигнальные лампы) логический элемент И 6, логический элемент ЗАПРЕТ 7, логический элемент И 8 логический элемент ЗАПРЕТ 9, исполнительный механизм 10 перемещения секции сходни, исполнительный механизм 11 перемещения стопора, датчики 12 и 13 положений стопора, датчики 14 и 15 положений секции сходни и источник 16 питания, причем первый прямой вход элемента И 6 подключен к первому выходу задатчика 1, второй прямой вход этого же элемента - к выходу датчика 12, инверсный вход - к выходу датчика 14, а выход - к исполнительному механизму 10, элемент ЗАПРЕТ 9 подключен своим прямым входом к первому выходу задатчика 1, инверсным входом - к выходу датчика 12, а выходом - к исполнительному механизму 11, элемент ЗАПРЕТ 7 подключен своим прямым входом к второ.му выходу задатчика 1,- инверсным входом - к выходу датчика 15, а выходом - к первому прямому входу элемента И 8 и к исполнительному механизму 10, при этом второй прямой вход элемента И 8 соединен с выходом датчика 15, инверсный вход этого же элемента - с выходом датчика 13, а выход - с исполнительным механизмом 11, Кроме того, выход датчика 12 связан с сигнализатором 2, выход датчика 13 с сигнализатором 3 и инверсным входом элемента И 8, выход датчика 14 - с сигнализатором 4, а выход датчика 15 - с сигналит затором 5.
Устройство управления судовой сходней работает следующим образом.
В исходном положении секция сходни находится в поднятом состоянии и зафиксирована (поджата) стопором. Питание с цепей снято. Сигнальные лампы не горят. Для опускания сходни задатчик режимов работы переводится в положение «Опускание. Далее процесс оускания сходни происходит автоматически. При этом сигнал с выхода «Опускание задатчика 1 режимов работы подается на первый прямой вход логического элемента ,И 6 и на прямой вход логического элемента ЗАПРЕТ 9. Сформировавшийся на выходе логического элемента ЗАПРЕТ 9 сигнал поступает на исполнительный механизм 11 перемещения стопора (на вход «Отдача стопора). При полном отходе стопора сигнал с датчика 12 поступает на второй прямой вход логического элемента И 6, на инверсный вход логического элемента ЗАПРЕТ 9 на сигнализатор 2. В результате сигнал с исполнительного механизма 11 перемещения стопора снимается и подается сигнал на исполнительный механизм 10 перемещения секции сходни (на вход «Опускание). При
перемещении секции сходни в крайнее положение срабатывает датчик 14 положения секции сходни, сигнал с его выхода поступает на инверсный вход логического элемента И 6 и на сигналнзатор 4. Сигнал с исполнительного механизма 10 перемещения секции сходни снимается. Процесс опускания сходни заканчивается. Для поднятия сходни задатчик 1 режимов работы ставится в положение «Подъем.
После этого процесс подъема сходни происходит автоматически. При этом сигиал с выхода «Подъем задатчика I поступает на прямой вход логического элемента
ЗАПРЕТ 7. С выхода данного элемента сигнал поступает на первый прямой вход логического элемента И 8 и на нсполнительный механизм 10 перемещения секции сходни. В результате происходит перемещение сходни в верхнее положение. При полном
поднятии секции сходни срабатывает датчик 15, сигнал с его выхода поступает на второй прямой вход логического элемента И 8, на инверсный вход элемента ЗАПРЕТ 7 и на сигнализатор 5. В результате сигнал
с исполнительного механизма 10 -перемещения секции сходни снимается, подается сигнал на исполнительный механизм 11 перемещения стопора. При полном перемещении стопора срабатывает датчик 13 положения стопора, сигнал с его выхода поступает
на инверсный вход логического элемента И 8. В результате перемещения стопора прекращается и срабатывает сигнализатор 5. На этом процесс подъема сходни заканчивается. Устройство обеспечнвает повышенную
надежность работы судовой сходни и безопасность ее эксплуатации за счет автоматизации процессов опускания и подъема.
Формула изобретения
Устройство управления судовой сходней, содержащее задатчик режимов работы, связанный с исполнительными механизмами перемещения секции сходни и ее стопора, и датчики положений, секции сходни и стопора, соединенные с соответствующими сигнализаторами, отличающееся тем, что. с целью повышения надежности его работы, оно снабжено первым и вторым логическими элементами И, один из входов которых выполнен инверсным, и первым и вторым логическими элементами ЗАПРЕТ, причем первый прямой вход первого элемента И подключен к первому выходу задатчика режимов работы, второй прямой вход этого же элемента - к выходу первого датчика положения стопора, инверсный вход - к выходу первого датчика положения секции схоДни, а выход - к исполнительному механизму перемещения секции сходнн.
