() ПРИВОД ПУЛЬСИРУЮЩЕГО КОНВЕЙЕРА
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод пульсирующего конвейера | 1984 |
|
SU1180316A2 |
| Привод для преобразования непрерывного вращательного движения в импульсное вращение | 1987 |
|
SU1451376A1 |
| Привод пульсирующего конвейера | 1985 |
|
SU1294724A1 |
| КОНВЕЙЕР С ПРЕРЫВИСТЫМ ДВИЖЕНИЕМ ТЯГОВОГО ОРГАНА | 2009 |
|
RU2416560C1 |
| Механизм регулируемого эксцентрикового узла | 1989 |
|
SU1700294A1 |
| Конвейер | 1980 |
|
SU897656A1 |
| Устройство для срезания волосяного покрова с меховых шкур | 1982 |
|
SU1124040A1 |
| Привод конвейера дискретного действия | 2019 |
|
RU2723618C1 |
| Телескопический конвейер | 1985 |
|
SU1276580A1 |
| Конвейер с прерывистым движением тягового органа | 2017 |
|
RU2674383C1 |
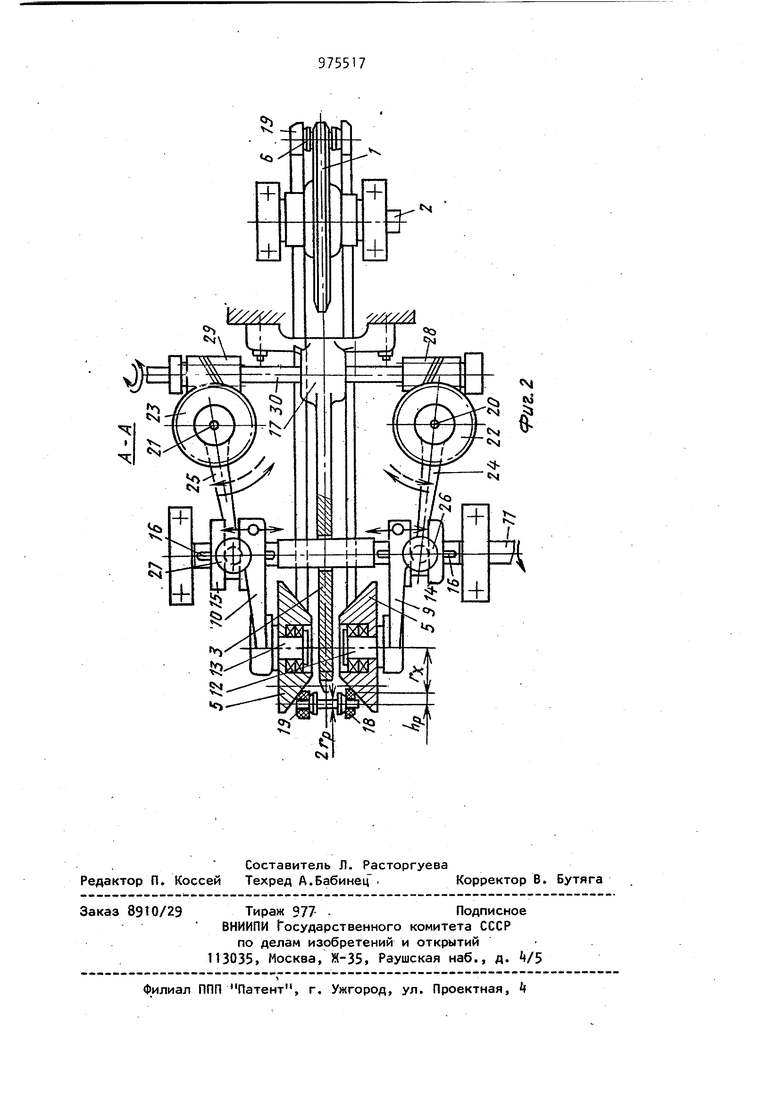
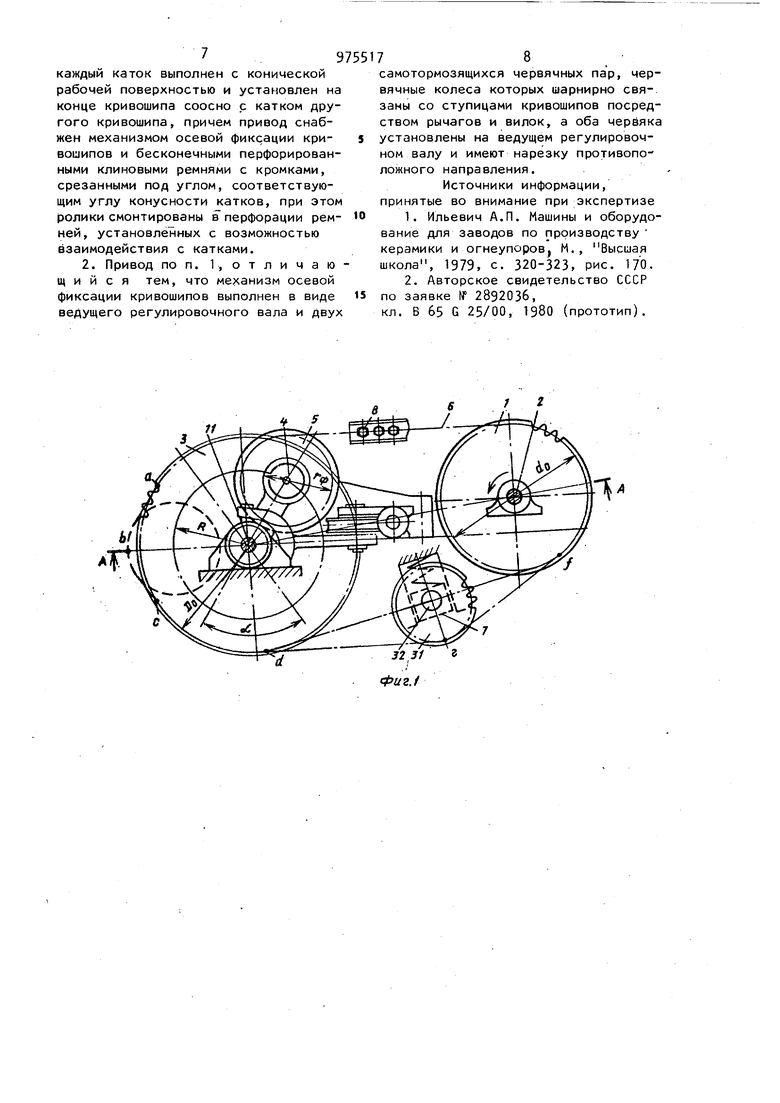
Изобретение относится к транспортирующему оборудованию для подачи из делий между рабочими операциями различных технологических процессов, в частности к пульсирующим цепным или ленточным конвейерам машин автоматического действия. Известен пульсирующий конвейер, включающий привод с механизмом преры вистого движения цепи в виде мальтий ского креста 1,. Недостатком привода данного конвейера является (ность и повышени требования к точности изготовления м ханизма прерывистого движения. Наиболее близким техническим реше нием из известных является привод пульсирующего конвейера, включающий ведомую звездочку, закрепленную на ведущем валу конвейера, неподвижную звездочку с центральным отверстием, в котором на валу размещено с возможностью вращения водило с катками, бесконечную охватывающую ведомую и неподвижную звездочки, цепь с натяжным механизмом и расположенными с боковых сторон ее оси роликами СЮНедостатками известного устройства являются повышенный шум, создаваемый при взаимодействии катков с роликами бесконечной цепи, а также невозможность регулирования на ходу машины темпа движения рабочего органа конвейера, т.е. соотношения паузы между пульсами и продолжительности пульса в движении рабочего органа. . Цель изобретения - снижение уровня шума и регулирование темпа движения ведущего вала конвейера. Указанная цель достигается тем, что в приводе пульсирующего конвейера, включающем ведомую звездочку, закрепленную на ведущем валу конвейера, неподвижную звездочку с центральным отверстием, в котором на валу размещено с возможностью вращения 39 водило с катками, бесконечную охватывающую ведомую и неподвижную звездочки, цепь с натяжным механизмом и расположенными с боковых сторон ее оси роликами, водило выполнено из двух размещенных на валу кривошипов, .дый из которых имеет сопряженную с общим валом посредством скользящей шпонки ступицу, а каждый каток выполнен с конической рабочей поверх ностью и установлен на конце кривоши па соосно с катком другого кривошипа причем привод снабжен механизмом осе вой фиксации кривошипов и бесконечными перфорированными клиновыми ремнями с кромками, срезанными под yi- лом, соответствующим углу конусности катков, при этом ролики смонтированы в перфорации ремней, установленных с возможностью взаимодействия с катками. Механизм осевой фиксации кривошипов выполнен в виде ведущего регулир вочного вала и двух самотормозящихся червячных пар, червячные колеса кото рых. шарнирно связаны со ступицами кривошипов посредством рычагов и вилок, а оба червяка установлены на ведущем регулировочном валу и имеют нарезку противоположного направления На фиг. 1 представлен предлагаемы привод, общий вид; на фиг, 2 - разрез А-А на фиг. 1, Привод пульсирующего конвейера состоит из ведомой звездочки , закрепленной на ведущем валу 2 конвейе ра, неподви хной звездочки 3 с центральным отверстием и размещенного Здесь, с возможностью вращения водила с катками 5 а также из бесконечной втулочно-роликовой цепи 6, ох ватывающей звездочки 1 и 3 натяжного механизма 7 и дополнительных роликов 8, расположенных с боковых сто рон ее оси с возможностью взаимодей ствия с катками 5. Водило + выполнено в виде двух кривошипов 9 и 10, объединенным общим валом 11, который кинематически, например с помощью муфты, соединяется с двигателем привода (не показан). Каждый кривошип несет на подшипниках осей 12 и 13 по одному консольному катку 5- Катки имеют коническую рабочую поверхность и соосны между собой. Кривошипы 9 и 10 размещены на ступицах Ш и 15, сопряженных с общим валом 11 скользя щими шпонками .16, их кривошипы снаб4жены механизмом 17 осевой фиксации. Дополнительные ролики 8 объединены с («аждой стороны цепи бесконечными перфорированными клиновыми ремнями 18 и 19 с кромками,срезанными под углом, соответствующим углу конусности катков 5Механизм 17 осевой фиксации кривошипов (фиг. 2) выполнен в виде двух червячных пар 20 и 21, червячные колеса 22 и 23 которых иарнирно связаны СО ступицами 15 и 1 рычагами 24 и 25 и вилок 2б и 27. Оба червяка 28 и 29 установлены на ведущем регулировочном валу 30. Червяки имеют нарезку противоположного направления. На валу 30 закреплена рукоятка управления с фиксатором (не показаны). Натяжной механизм 7 (фиг. 1) состоит из звездочки 31 с подпружиненной осью 32. Неподвижная звездочка 3 имеет диаметр начальной окружности 0 ZR.Катки 5 имеют переменный фактический радиус г, а рабочая ширина клинового ремня составляет hp. Таким образом, катки 5 имеют фиктивный радиус контакта с нейтральной осью цепи 6, который находится из выражения Гф (hp4- Гх)(1) Радиус окружности центров катков составляет R, а диаметр начальной окру : ности ведомой звездочки 1 d 2го . Диаметр основного стандартного ролика цепи (фиг. 2) составляет 2гр . Числа зубьев неподвижной и ведомой звездочек составляет соответственно Z и Zg. Привод может нормально работать, если соотношение основных кинематических размеров обеспечивает вывод основных роликов цепи (точка Ъ на фиг. 1) в зону некасания или вершин зубьев неподвижной звездочки 3 в соответствии с выражением. (R4- ГУ 4. h) - Гг,- Rn h, где hj, - высота головки зуба звездочки 3 (см. фиг. 2). Кроме того, число шагов цепи Z в кривой аЪС (фиг. 1) должно быть больше числа шагов в отрезке дуги ac(Z,) звездочки 3 на целое число AZ. AZ . Работает привод следующим образом. При соблюдении условий (2) и (3) и вращении со скоростью от двигателя вала 11 вращаются кривошипы 9 и 10 с катками 5 (фиг. 1), которые оттягивают цепь 6 через ремни 18 и 19. Дополнительные ролики 8 от зубь неподвижной звездочки 3 и в пределах угла поворота водила k поворачива ведомую звездочку 1 на угол, соответствующий отношению числа Д2 и числа зубьев 2g, ведомой звездочки. Отрезок цепи def (фиг. 1) при этом сокращается на число звеньев uZ, а звездочка 31 натяжного механизма осью 32 снимает пружину до необходи мого размера по высоте. При дальней шем вращении водила цепь 6 волно-образно перекатывается по звездочке 3, а звездочка 1 неподвижна. При пр ходе катками 5 нижнего положения из быток звеньев цепи uZ возвращается в зону def и звездочка 31 под дейст вием пружины возвращается в исходно поло/хение. Ведомая звездочка 1 при этом неподвин на. При вращении водила k с катками между вёрхней и нижней ветвями цепи звездочка 1 остается неподвижной. Затем цикл движения повторяется. Таким образом, при непрерывном вращении водила 4 с равномерной угло вой скоростью ( ведомая звездочка и ведущий вал 2 конвейера вращается пульсационно. Среднее передаточное число привода определяется выражением ZB(г,) Угол активного взаимодействия кат ков 5 с цепью 6 определяется выражением0, 2arccos Угол поворота водила А, соответствующий остановке ведомой звездочки находится из jb об(6) Соответственно время Т движения ведущего вала 2 конвейера и его циклической остановки TO соответственно находятся из выражений cL Темп движения ведущего вала 2 конвейера можно изменить, меняя угол .с1за счет изменения радиуса Гф варьи рованием радиуса г- согласно формуле (1). Это осуществляется следующим образом. Вращая ведущий регулировоч176ный вал 30 механизма 17 осевой фиксации кривошипов с помощью червячных пар 20 и 21, можно свести или развести с помощью рычагов 24, 25 и вилок 26 и 27 ступицы 1 и 15 кривошипов 9 и 10, а, следовательно, и катки 5, которые при вращении с кривошипами встречают верхнюю ветвь цепи 6, т.е. ее клиновые ремни 18 и 19 на другом радиусе Гу. При сближении катков 5 величина угла oi и время Т увеличиваются, а величина угла (Ь и время Тд уменьшаются, а при разведении катков 5 наоборот. Частоту пульсации можно увеличить, увеличивая угловую скорость вала 11(ti)c.pПри уменьшении радиуса г. в соответствии с выражением hp-f- гх К о можно добиться полной остановки ведомой звездочки 1 при вращении вала 1 1 с той же скоростью UiKpТаким образом, применение предложенного устройства упрощает конструкцию водила за счет уменьшения числа катков до двух, что, в свою очередь, позволяет сравнительно просто обеспечить регулировку темпа пульсаций конвейера, а применение бесконечных перфорированных клиновых ремней резко снижает уровень шумов, вызываемых контактом катков с дополнительными роликами. Устройство привода пульсирующего конвейера направлено на повышение безопасности и комфортности труда операторов и улучшение технического обслуживания машины. Формула изобретения 1. Привод пульсирующего конвейера, включающий ведомую звездочку, закрепленную на ведущем валу конвейера, неподвижную звездочку с центральным Ьтверстием, в котором на валу размещено с возможностью вращения водило с катками, бесконечную охватывающую ведомую и неподвижную звездочки, цепь с натяжным механизмом и расположенными с боковых сторон ее оси роликами, отличающийс я тем, что, с целью снижения уровня шума и регулированиятемпа двих ения ведущего вала конвейера, водило выполнено из двух размещенных на вау кривошипов, каждый из которых имеет сопряженную с общим валом посредством скользящей шпонки ступицу, а
797
каждый каток выполнен с конической рабочей поверхностью и установлен на конце кривошипа соосно с катком другого кривошипа, причем привод снабжен механизмом осевой фиксации кривошипов и бесконечными перфорированными клиновыми ремнями с кромками, срезанными под углом, соответствующим углу конусности катков, при этом ролики смонтированы вГ перфорации ремней, установленных с возможностью взаимодействия с катками.
78
самотормозящихся червячных пар, червячные колеса которых шарнирно связаны со ступицами кривошипов посредством рычагов и вилок, а оба червяка установлены на ведущем регулировочном валу и имеют нарезку противоположного направления.
Источники информации, принятые во внимание при экспертизе
2,Авторское свидетельство СССР по заявке № 2892036,
кл. В 65 G 25/00, 1980 (прототип). / 2
