Изобретение относится к транспортирующему оборудованию для прерывистой подачи изделий между рабочими операциями различных технологических процессов, в частности к пульсирующим цепным или ленточным конвейерам автоматического действия.
Цель изобретения - снижение динамических нагрузок за счет безударного контакта катка с бесконечной цепью и расщирение диапазона регулирования темпа движения.
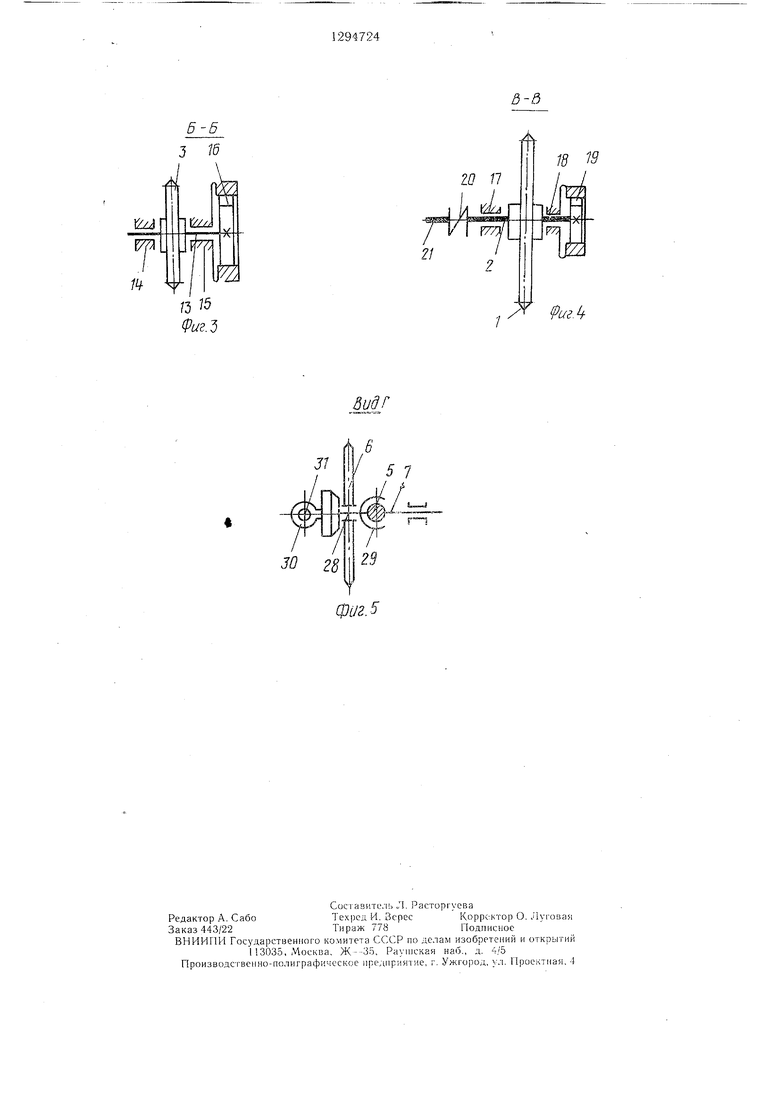
На фиг. 1 показана принципиальная рабочая схема привода; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1; на фиг. 4 - разрез В-В на фиг. 1; на фиг. 5 - вид Г на фиг. 2.
Привод пульсирующего конвейера (фиг. 1) состоит из ведомой звездочки 1, 5 закрепленной на ведомом валу 2, опорной звездочки 3, водила в виде кривошипа 5 с катком 6, выполненного с зубчатым венцом и установленного на ведущем валу 7 привода, бесконечной, например, втулочно-роликовой „ цепи 8, охватывающей обе звездочки 1 и 3 и каток 6, натяжного приспособления 9 и механизма 10 регулирования темпа движения присоединенного конвейера. Ведущий вал 7 привода соединен муфтой 11 с валом электродвигателя 12 (фиг. 2). Вал 7 размещен ав- 25 тономно между валами 2 и 13 звездочек 1 и 3 с возможностью постоянного контакта катка 6 с бесконечной цепью 8 в любом положении кривощипа независимо от угла его поворота ф.
Опорная звездочка 3 (фиг. 3) закреплена на валу 13, размещенном в опорах 14 и 15 и муфтой 16 свободного хода связанном с корпусом опоры 15, Вал 2 ведомой звездочки 1 (фиг. 4) также размещен в опорах 17 и 18, связан с корпусом опоры 18
параллельным кривощипу. Винт 31 своими опорами размещен в траверсе 32, установленной цапфой 33 в опоре 34 соосно с валом 7 кривощипа. На винте 31 закреплена коническая щестерня 35, находящаяся в за- 5 цеплении с коническим колесом 36, вал 37 которого размещен в полой цапфе 33 траверсы 32. На валу 37 установлен тормозной шкив 38 колодочного тормоза 39.
Привод пульсирующего конвейера ра- 10 ботает следующим образом.
За исходное положение принимается верхнее положение катка 6 (центр Oi), радиус кривощипа 5 Rx, тормозной диск 38 освобожден, т.е. тормоз 39 разомкнут. При вращении кривощипа 5, например, против часовой стрелки в течение угла поворота центр катка 6 переходит в точку О2, при этом длина гибкой связи между звездочками 1 и 3 увеличивается от значения i аЬ + be -|- cd
Js ah + hg + g{ + fe -f de
Вращение кривошипа сопровождается следующим: отрезок ad цепи натягивается усилиями SrSs, т.е. цепь стремится в точках and повернуть звездочки 3 и 1; муфта 16 свободного хода звездочки 3 установлена так, что звездочка 3 не. может повернуться под действием усилия 82 по часовой стрелке.
Следовательно, под действием усилия Si поворачивается против часовой стрелки звездочка 1 (муфта 19 свободного хода установлена так, что не может препятствовать 30 этому повороту);
увеличение длины отрезка EI вызывает вместе с поворотом звездочки 1 и холостой ветви цепи k, вследствие чего натяжная звездочка 27 натяжного устройства под действием натяжения цепи перемещается
муфтой 19 свободного хода. Вал 2 звездочки вверх на величину In.
1 муфтой 20 соединен с валом 21 присоеди-Повороту кривошипа на угол л соответненного конвейера.
Натяжное приспособление 9 (фиг. 1) выполнено в виде натяжной звездочки 22, установленной в подвижной опоре 23 с возможностью перемещения в направляющих 24 под действием пружины 25. Цепь направляется к натяжной звездочке посредством отклоняющей звездочки 26. Каток 6 снабжен зубчатым венцом 27 для обеспечения его контакта зацеплением с бесконечной цепью 8. Механизм 10 регулирования темпа
ствует максимальное удлинение верхнего отрезка цепи
121,
4Q поворот ведомой звездочки 1 на угол
в л с Malic ,
Г2
2,АЕмак.
45
2ЯГ2
ход натяжного устройства
лД макс
движения выполнен в виде приспособления для перемещения и фиксации катков 6 вдоль кривощипа 5. При этом, он представляет собой устройство для соединения
При дальнейшем повороте кривошипа 5 против часовой стрелки еще на угол л центр вращения катка 6 переходит из точки Ог в точку Оь При этом кривошип постепеноси 28 катка 6 с кривошипом 5 и фиксации но освобождает набранную в первом полупериоде длину гибкой связи (цепи); натяжное приспособление 9 выбирает эту слабину цепи со стороны опорной звездочки 3, так как муфта свободного хода 19 не дает повернуться звездочке 1 по часовой стрелке; звездочка 3 поворачивается против часовой стрелки; звездочка 1 находится в состоя нии покоя (выстой).
этои оси в радиальном направлении параллельно кривошипу. Это устройство выполнено в виде ползушки 29 и гайки 30, насаженных на ось катка 28. В ползушке имеется центральное отверстие с вырезом для направления ее по кривошипу при радиальном перемещении. Гайка 30 связана с раз- .мещенным внутри нее ходовым винтом 31,
5 5
параллельным кривощипу. Винт 31 своими опорами размещен в траверсе 32, установленной цапфой 33 в опоре 34 соосно с валом 7 кривощипа. На винте 31 закреплена коническая щестерня 35, находящаяся в за- цеплении с коническим колесом 36, вал 37 которого размещен в полой цапфе 33 траверсы 32. На валу 37 установлен тормозной шкив 38 колодочного тормоза 39.
Привод пульсирующего конвейера ра- ботает следующим образом.
За исходное положение принимается верхнее положение катка 6 (центр Oi), радиус кривощипа 5 Rx, тормозной диск 38 освобожден, т.е. тормоз 39 разомкнут. При вращении кривощипа 5, например, против часовой стрелки в течение угла поворота центр катка 6 переходит в точку О2, при этом длина гибкой связи между звездочками 1 и 3 увеличивается от значения i аЬ + be -|- cd
Js ah + hg + g{ + fe -f de
Вращение кривошипа сопровождается следующим: отрезок ad цепи натягивается усилиями SrSs, т.е. цепь стремится в точках and повернуть звездочки 3 и 1; муфта 16 свободного хода звездочки 3 установлена так, что звездочка 3 не. может повернуться под действием усилия 82 по часовой стрелке.
Следовательно, под действием усилия Si поворачивается против часовой стрелки звездочка 1 (муфта 19 свободного хода установлена так, что не может препятствовать 0 этому повороту);
увеличение длины отрезка EI вызывает вместе с поворотом звездочки 1 и холостой ветви цепи k, вследствие чего натяжная звездочка 27 натяжного устройства под действием натяжения цепи перемещается
вверх на величину In.
ствует максимальное удлинение верхнего отрезка цепи
121,
поворот ведомой звездочки 1 на угол
в л с Malic ,
Г2
2,АЕмак.
2ЯГ2
ход натяжного устройства
лД макс
При дальнейшем повороте кривошипа 5 против часовой стрелки еще на угол л центр вращения катка 6 переходит из точки Ог в точку Оь При этом кривошип постепенно освобождает набранную в первом полу
периоде длину гибкой связи (цепи); натяжное приспособление 9 выбирает эту слабину цепи со стороны опорной звездочки 3, так как муфта свободного хода 19 не дает повернуться звездочке 1 по часовой стрелке; звездочка 3 поворачивается против часовой стрелки; звездочка 1 находится в состоянии покоя (выстой).
В конце полупериода каток 6 и звездочка 22 натяжного устройства 9 оказываются в исходном положении. Затем при дальнейшем вращении цикл повторяется. Таким образом, непрерывное вращение кривошипа привода пульсирующего конвейера сопро- 5 вождается прерывистым пульсирующим (шаговым) вращением ведомой звездочки и ведущего вала кривощипного конвейера.
В процессе вращения кривощипа 5 вместе с ним вращается на установленном ю радиусе Rx (фиг. 2) каток 6, заставляющий через гайку 30 вращаться с такой же скоростью винт 31 и траверсу 32 при разомкнутом тормозе 39. Вместе с винтом и траверсой вращается вокруг оси вала 7 и кониния в широком и многоступенчатом диапазоне.
Таким образом, выполнение привода пульсирующего конвейера с кривощипом, автономно установленным между звездочками, снабженными муфтами свободного хода, обеспечивает безударную работу привода за счет неразрывной связи катка с бесконечной цепью при любом положении кривощипа, а регулирование радиуса кривощипа RMSKC О гарантирует широкий и многоступенчатый диапазон регулирования темпа движения конвейера. В итоге повышается динамическая прочность и долговечность цепи и обеспечивается возможное повыще- ние скорости вращения кривощипа, что
ческая шестерня 35, которая не может повер- 5 расширяет область возможного применения
нуться вокруг своей оси и увлекает в свободное вращение колесо 36, освобожденное от действия тормозного момента.
Для того, чтобы изменить темп движе- ния конвейера, необходимо импульсно включить тормоз 39. Тогда колесо 36 останавливается, а при продолжающемся вращении группы кривошип-водило (против часовой стрелки) коническая шестерня 35 поворачивается вокруг своей оси на некоторый угол
20
предлагаемого привода при улучшении его регулировочных характеристик.
Формула изобретения
1. Привод пульсирующего конвейера, содержащий ведомую и опорную звездочки, установленные на размещенных в опорах валах, водило в виде закрепленного на ведущем валу кривошипа с расположенным
(против часовой стрелки со стороны вершины 25 на нем на оси катком, бесконечную цепь.
конуса и перемещает группу гайка 30 - ось с блоком 6 - ползушка 29 к центру вращения кривошипа, уменьшая радиус Rx. Уменьшение Rx обеспечивает уменьшение параметра Д1макс и величину угла поворота веохватывающую звездочки и каток, натяжное приспособление и механизм регулирования темпа движения, отличающийся тем, что, с целью снижения динамических нагрузок за счет безударного кс такта катка с бескодомой звездочки 6 за один оборот криво- 30 нечной цепью, като1 выполнен с зубчатым шипа.
Если нужно увеличить Rx, нужно проделать то же самое, но после реверса кривошипа 5, что не вызывает изменения направления вращения ведомой звездочки 1.
35
венцом, а ведущий вал расположен между валами опорной и ведомой звездочек с возможностью постоянного контакта катка с бесконечной цепью, при этом валы опорной и ведомой звездочек связаны со своими опорами посредством муфт свободного хода, а механизм регулирования темпа движения выполнен в виде приспособления для перемещения и фиксации катка вдоль кривошипа. 2. Привод по п. 1, отличающийся тем, что, с целью расширения регулирования темпа движения, приспособление для перемещения и фиксации катка вдоль кривощипа выполнено в виде установленных на оси катка ползушки и гайки, размешенного внутри гайки параллельно кривошипу ходового винта, и тормоза, связанного с ходовым винтом посредством конической пары.
Операцию изменения радиуса Rx можно выполнить и при остановленном приводе ручным поворотом вала 37 (при разомкнутом тормозе) или от предусмотренного для этих целей сервопривода.
Изменение длины цепи между звездочками 1 и 3 на рабочей ветви компенсируется натяжным приспособлением 9. Описанным методом регулирования можно получить максимально запланированные RMSKC 0 и вмакс z О, а также минимальное RMHH О и вмин О, т.е. регулировать темп движения в широком и многоступенчатом диапазоне.
Таким образом, выполнение привода пульсирующего конвейера с кривощипом, автономно установленным между звездочками, снабженными муфтами свободного хода, обеспечивает безударную работу привода за счет неразрывной связи катка с бесконечной цепью при любом положении кривощипа, а регулирование радиуса кривощипа RMSKC О гарантирует широкий и многоступенчатый диапазон регулирования темпа движения конвейера. В итоге повышается динамическая прочность и долговечность цепи и обеспечивается возможное повыще- ние скорости вращения кривощипа, что
расширяет область возможного применения
предлагаемого привода при улучшении его регулировочных характеристик.
Формула изобретения
1. Привод пульсирующего конвейера, содержащий ведомую и опорную звездочки, установленные на размещенных в опорах валах, водило в виде закрепленного на ведущем валу кривошипа с расположенным
на нем на оси катком, бесконечную цепь.
охватывающую звездочки и каток, натяжное приспособление и механизм регулирования темпа движения, отличающийся тем, что, с целью снижения динамических нагрузок за счет безударного кс такта катка с бесконечной цепью, като1 выполнен с зубчатым
нечной цепью, като1 выполнен с зубчатым
венцом, а ведущий вал расположен между валами опорной и ведомой звездочек с возможностью постоянного контакта катка с бесконечной цепью, при этом валы опорной и ведомой звездочек связаны со своими опорами посредством муфт свободного хода, а механизм регулирования темпа движения выполнен в виде приспособления для перемещения и фиксации катка вдоль кривошипа. 2. Привод по п. 1, отличающийся тем, что, с целью расширения регулирования темпа движения, приспособление для перемещения и фиксации катка вдоль кривощипа выполнено в виде установленных на оси катка ползушки и гайки, размешенного внутри гайки параллельно кривошипу ходового винта, и тормоза, связанного с ходовым винтом посредством конической пары.
6-6
3 /б
18


| название | год | авторы | номер документа |
|---|---|---|---|
| Привод пульсирующего конвейера | 1984 |
|
SU1180316A2 |
| Привод пульсирующего конвейера | 1981 |
|
SU975517A1 |
| Пульсирующий конвейер с регулируемым шагом | 1981 |
|
SU988691A1 |
| Конвейер | 1980 |
|
SU897656A1 |
| Устройство для поворота грузовых подвесок конвейера | 1983 |
|
SU1155535A1 |
| ЛЕНТОЧНЫЙ КОНВЕЙЕР | 1996 |
|
RU2109670C1 |
| МАШИНА | 2009 |
|
RU2401762C1 |
| Штабелирующая тележка | 1941 |
|
SU83996A1 |
| Привод для преобразования непрерывного вращательного движения в импульсное вращение | 1987 |
|
SU1451376A1 |
| Механизм подачи канатно-цепной пилы | 1980 |
|
SU935613A1 |
Изобретение относится к транспортирующему оборудованию для прерывистой подачи изделий между рабочими операциями различных технологических процессов. Цель изобретения - снижение динамических нагрузок за счет безударного контакта катка с бесконечной цепью и расширение диапазона регулирования темпа движения. Привод конвейера включает ведомую 1 и опорную 3 звездочки. Ведомая звездочка I закреплена на ведомом валу 2, размещенном в опорах 17 и 18. Опорная звездочка 3 закреплена на валу 13, размещенном в опорах 4 и 15. Между валами 2 и 13 расположен ведущий вал 7. Валы 2 и 13 связаны своими опорами посредством муфт 19 свободного хода. На валу 7 расположено водило в виде закрепленного на нем кривошипа 5 с катком 6. Он выполнен с зубчатым венцом 27 для обеспечения его контакта с бесконечной цепью 8, охватывающей обе звездочки I и 3 и каток 6. За счет неразрывной связи катка 6 с цепью 8 при любом положении кривощипа 5 обеспечивается безударная работа привода. Для регулирования темпа движения конвейера служит механизм 10, выполненный в виде приспособления для перемещения и фиксации катка 6 вдоль кривошипа 5. Приспособление выполнено в виде установленных на оси катка 6 ползущий и гайки. Внутри гайки параллельно кривощипу 5 размещен ходовой винт. На нем закреплена коническая винтовая пара в виде шестерни и колеса. Приспособление регулирует радиус кривощипа 5, обеспечивая этим возможное повы- щение скорости вращения кривошипа 5. 1 з.п. ф-лы, 5 ил. (О (Л ю со 4 ISD N /9 
30 28
фиг. 5
| Конвейер | 1980 |
|
SU897656A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Привод пульсирующего конвейера | 1981 |
|
SU975517A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
