(Ц) СУДОВОЙ ЦИФРОВОЙ АКСИОМЕТР
| название | год | авторы | номер документа |
|---|---|---|---|
| Судовой цифровой аксиометр | 1979 |
|
SU977279A2 |
| Судовой цифровой аксионметр | 1977 |
|
SU918184A1 |
| БОРТОВОЙ АКСИОМЕТР ПЕРЕКЛАДКИ РУЛЯ | 1972 |
|
SU432041A1 |
| ПРЕОБРАЗОВАТЕЛЬ УГЛА ПОВОРОТА ВАЛА В КОД | 2013 |
|
RU2534971C1 |
| Цифровой измеритель угловой скорости | 1988 |
|
SU1509741A1 |
| Цифровой следящий измеритель периода и девиации периода | 1977 |
|
SU714303A1 |
| УПРАВЛЯЮЩИЙ АППАРАТНО-ПРОГРАММНЫЙ КОМПЛЕКС ДЛЯ ОБРАБОТКИ РАДИОЛОКАЦИОННОЙ ИНФОРМАЦИИ | 2001 |
|
RU2222028C2 |
| Указатель положения руля | 1982 |
|
SU1041420A1 |
| Устройство для анализа логических состояний | 1980 |
|
SU1096648A1 |
| Следящий измеритель частоты | 1985 |
|
SU1298675A1 |
I
Изобретение относится к судостро ению, в частности к судовым цифровым аксиометрам.
Известен судовой цифровой аксиометр содержащий генератор импульсов, делитель, первый и второй формирователи, датчик положения пера руля, измеритель модуля угла перекладки руля, первый, второй и третий элементы И, счетчики модуля угла, регистр модуля угла, блок сравнения, опре делитель борта, включающий схему определения приоритета и регистр борта, дешифратор, цифровой и стрелочные индикаторы, при этом выход генератора импульсов через последовательно включенные первый элемент И, счетчик модуля угла и регистр моду ля угла соединен с внешним выходом , аксиометра, а через последовательно включенные делитель, первый формирователь, датчик и второй формирователь - с первым входом измерителя модуля угла перекладки руля, второй
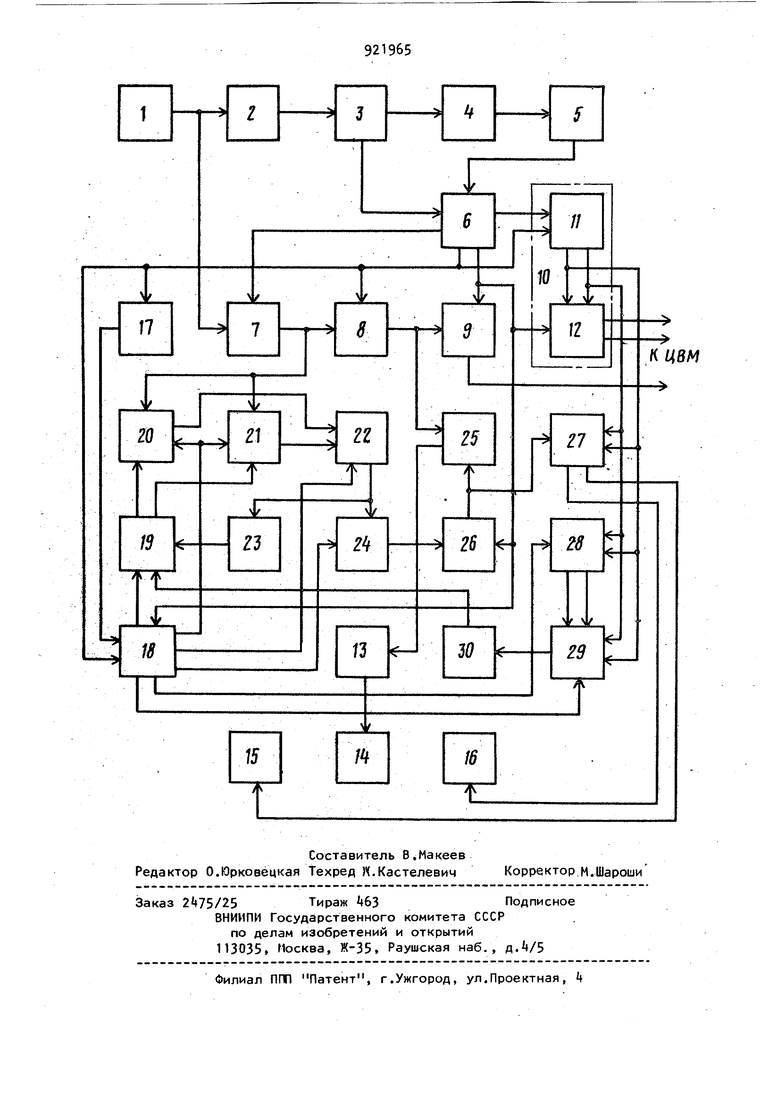
|Вход которого соединен с вторым выходом первого формирователя, первый выход измерителя модуля угла перекладки руля соединей с вторым входом первого элемента И, второй выход с вторым входом счетчика модуля угла и первым входом схемы определения приоритета, третий выход - с вторым входом регистра модуля угла и первым входом регистра борта, четвертый выход - с вторым входом схемы определения приоритета, выходы которой через регистры борта соединены с внешними выходами аксиометра, кроме того, выход дешифратора соединен с входом цифрового индикатора 1.
Однако в известном устройстве занесение измеряемого параметра в выходной регистр производится после каждого измерения, что позволяет в режиме опроса с ЦВМ выдать последнее значение измеряемого параметра без внесения динамической ошибки. При выводе информации на индикацию возникает задача автоматического изменения частоты смены информации на табло в зависимости от скорости изменения измеряемого параметра. Это связано с спецификой цифровой индикации, когда при равновероятном появлении соседних цифровых отсчетов, даже при неподвиж ном руле появляется мерцание цифр младшем разряде (при отсчетах типа .12,512,) или в всех разрядах (при отсчетах типа 29,,0). Такое мер цание на низких скоростях смены информации ухудшает восприятие и повышает утомляемость оператора и ухудша ет эксплуатационные свойства устройства. Цель изобретения - улучшение эксп луатационных характеристик аксиометра. Поставленная цель достигается тем, что в устройство введены таймер распределительный блок, триггер управления, реверсивный счетчик, дешиф ратор нуля, регистр приращения моду|ля угла, дополнительный регистр модуля угла, управляемый делитель.первый и второй дополнительные регистры ;борта и третий формирователь, при этом первый вход распределительного блока соединен с вторым выходом измерителя модуля угла перекладки ру ля и входом таймера, второй вход рас пределительного блока - с выходом таймера, третий вход - с третьим выходом измерителя модуля угла перекладки руля и первым входом управляемого делителя, а выходы распределительного блока соответственно соединены с первыми входами блока сравнения, второго дополнительного регистра борта, регистра приращения модуля угла, реверсивного счетчика, второго и третьего элементов И и первым установочным входом триггера управления, второй установочный вход которого соединен с выходом третьего формирователя, счетный вход триггера управления - с выходом дешифратора нуля, а прямой и инверсный выходы с вторыми входами соответственно вто рого и третьего элементов И, у которых третьи входы соединены с выходом первого элемента И, а выходы - соответственно с вторым и третьим входами реверсивного счетчика, выход кото рого в свою очередь соединен с входо дешифратора нуля и вторым входом регистра приращения модуля угла, у которого выход соединен с вторым вхо924 дом управляемого делителя, выход управляемого делителя соединен с первыми входами первого дополнительного регистра борта и дополнительного регистра модуля угла, у которого вход соединен с выходом счетчика модуля угла, а выход - с дешифратором, кроме того, выход блока сравнения соединен с входом третьего формирователя, второй и третий входы блока сравнения соединены с выходами второго дополнительного регистра борта, (Четвертый и пятый входы блока срав нения соединены с выходами схемы определения приоритета и соответственно с вторыми и третьими входами первого и второго дополнительных регистров борта, выходы первого дополнительного регистра борта соединены с входами стрелочных индикаторов. На чертеже представлена структурная схема судового цифрового аксиометра. Выход генератора 1 импульсов соединен через делитель 2 с входом первого формирователя 3. Первый выход первого формирователя 3 соединен через датчик j положения пера руля и второй формирователь 5 с первым входом измерителя 6 модуля угла перекладки руля, второй выход первого формирователя 3 непосредственно с вторым входом измерителя 6 модуля угла перекладки руля. Выходы измерителя модуля угла перекладки руля . соответственно соединены: первый с вторым входом первого элемента И 7 первый вход которого соединен с выходом генератора 1, второй - с вторым входом счетчика 8 модуля yi- ла, выход которого связан с входом регистра 9 модуля угла и первыми входом входящей в блок определителя 10 борта схемы 11 определения приоритета, третий - с вторым входом регистра 9 модуля угла, первым входом регистра 12 борта, входящего в блок определителя борта, четвертый с вторым входом схемы 11 определения приоритета. Выход счетчика 8 модуля угла соединен через регистр 9 модуля угла с внешним выходом аксиометра К ЦВМ и через дешифратор 13 со входом цифрового индикатора 1, Кроме того, имеются стрелочные индикаторы 15 и 16. Второй выход измерителя 6 модуля угла перекладки руля связан также с ВХОДОМ таймера 1 и первым входом распределительного блока 18, с третьим входом которого связан третий выход измерителя модуля угла перекладки руля. Прямой и инверсный выходы триггера 19 управления соответ ственно соединены с вторыми входами второго и третьего элементов И 20 21j выходы которых соответственно соединены с вторым и третьим охрдами реверсивного счетчика 22. Выход реверсивного счетчика 22 через дешифра тор 23 нуля соединен с счетным входом триггера 19 управления и с вторы входом регистра 2k приращения модуля угла, у которого выход соединен с вторым входом управляемого делителя 2б. Первый вход дополнительного регис ра 25 модуля угла соединен с выходом упдавляемого делителя 26, с которым также связан первый вход первого дополнительного регистра 27 борта. Выход регистра 24 приращения модуля уг ла соединен с вторым входом управляе мого делителя 26. В линию связи счет чика 8 модуля угла с дешифратором 13 включен дополнительный регистр 25 модуля угла. Выход первого элемента И 7 соединен с первым входом счетчика 8 модуля угла и третьими входами второго 20 и третьего 21 элементов И. Выходы схемы 11 определения приоритета соединены соответственно с вторыми и третьими входами регистра 12 борта, первым и вторым дополнительными регистрами 27 и 28 борта и четвертым и пя.тым входами блока 29 сравнения. Выходы регистра 12 борта соединены с внешними выходами К ЦВМ Выходы первого дополнительного регистра 27 борта соединены с входами стрелочных индикаторов 15 и 16. Выходы второго дополнительного регистра 28 борта соответственно соединены с вторым и третьим входами блока 29 сравнения. Выход блока 29 сравнения через третий формирователь 30 соединен с вторым установочным входом триггера 19 управления, у которого первый установочный вход соединен с шестым выходом распределительного блока 18. Остальные выходы распределительного блока 18 соответственно соединены: первый - с первым входом блока 29 сравнения, второй - с первым входом второго дополнительного регистра 28 борта, третий - с первым 56 входом регистра 2 приращения модуля угла, четвертый - с первым входом реверсивного счетчика 22, пятый - с первыми входами второго и третьего элементов И 20 и 21. Второй вход распределительного блока 18 соединен с выходом таймера 17. Устройство работает следующим образом. Сигнал кварцевого генератора 1 ;импульсов поступает на вход делителя 2, кoэффициeнt деления которого выбирается из условия требуемой дискретности отсчета. С выхода делителя 2сигнал через первый формирователь 3поступает в виде опорной структуры на вход датчика 4 и в виде импульсов управления - на вход измерителя 6 модуля угла перекладки руля, на второй вход которого поступает формированный на втором формирователе 5 выходной сигнал с датчика. Измеритель 6 последовательно во времени выполняет следующие операции: в момент прихода опорного импульса формирует импульсы занесения предыдущего результата измерения в регистр 9 модуля угла и регистр 12 борта, которые также поступают на входы управляемого делителя 26 и распределительного блока 18, формирует импульсы сброса счетчика 8 модуля угла и схемы 11 олределения приоритета, которые также поступают на входы таймера 17 и распределительного блока 18, выделяет временной интервал между опорным и измеряемым сигналами, в течение которого импульсы с генератора 1 через первый элемент И 7 поступают на вход счетчика 8 модуля угла и третьи входы второго 2П и третьего 21 элементов И. Кроме этого, измеритель .6 формирует вспомогательную последовательность импульсов, сдвинутых относительно опорных на 180, которые поступают вместе с импульсами измеряемой последовательности на вход схемы 11 определения приоритета.Таким образом, нформация в регистрах 9 и 12 модуля гла и борта обновляется в каждом цикле измерения, и с выходов .обоих регистров поступает в ЦВМ. Для выхода информации на индикацию исполь зуются дополнительный регистр 25 модуля угла и первый дополнительный регистр 27 борта, скорость смены инормации в которых регулируется с помощью управляемого делителя 2б, коорый обеспечивает деление импульсов 7 занесения, формируемых измерителем 6 в соответствии с кодом управления. .Код управления, поступающий с регист ра 24 приращения модуля угла,в свою очередь пропорционален скорости пот ворота вала датчика. Получение кода управления происходит следующим обра зом. Первым импульсом с выхода таймера 17, поступающим на распределительный блок 18, триггер 19 управления по первому установочному входу ставится в единицу, реверсивный счетчик 22 устанавливается в исходное нулевое состояние, и на первые входы второго 20 и третьего 21 элементов И подается разрешающий уровень. Таким образом, на входах второго элемента И 20 установятся два разрешающих уровня, и первый числоимпульсный код модуля угла поворота руля с выхода элемента И 7 через вто рой элемент И 20 поступит на суммирующий вход реверсивного счетчика 22, при этом пришедший на третий вхо распределительного блока 18 импульс занесения пройдет на его второй вйход и поступит на первый вход второго дополнительного регистра 28 борта в который запишется значение борта. Пришедший на первый вход распределительйого блока 18 сбросовый импульс .с измерителя 6 снимет разрешающий уровень с первых входов второго 20 и третьего 21 элементов И и запретит формирование и прохождение через рас пределительный блок 18 управлякяцих ймоульсов. По второму импульсу с выхода таймера 17 распределительный блок снова установит на первых входах второго 20 и третьего 21 элемен тов И разрешающий уровень и разреши формирование результата блоку 29 сравнения, на второй и третий входы которого поступает код борта запол|ненного значения угла поворота руля. Сигнал на выходе блока 29 сравнения может быть получен только в случае сохранения борта у второго значения ;угла поворота руля. 8 этом случае третий.формирователь 30 формирует короткий импульс управления, поступающий на второй установочный вход триггера 19 управления и опрокидывающий его. Таким образом, числоимпульсный код модуля второго значения угла поворота руля с выхода первого элемента И 7 уже через третий элемент И 21 поступит на вычитакяций Bxofl реверсивного счетчика 22. Если. 5 второе значение по модулю окажется больше первого, при обнулении реверсивного счетчика 22 срабатывает дешифратор 23 нуля, импуЛьс с которого поступит на счетный вход три|- гера 19 управления и опрокинет его. Если второе значение угла поворота руля равно нулю или произошла смена борта по отношению к первому значению, модуль второго значения десуммируется к первому. Таким образом, в результате сравнения двух значений углов поворота руля в реверсивном счетчике будет находится код величины относительного изменения угла поворота между двумя замерами, независомо от борта. Пркшедший на третий вход распределительного блока 18 импульс занесения пройдет на его третий выход и поступит на первый вход регистра 24 приращения модуля угла, в который запишется содержимое реверсивного счетчика. Сбросовый импульс снимет разрешающий уровень с первых входов второго 20 и третьего 21 элементов И и запретит формирователь и прохождение через распределительный блок 18 импульсов управления. В качестве таймера 17 применен делитель частоты. Период выходных импульсов выбирается из соотношения максимальной скорости поворота руля и количества выбранных скоростей вывода информации на индикацию таким образом, что каждой скорости смены информации соответствует своя величина приращения модуля угла. С приходом очеоедного импульса с выхода таймера цикл вычисления приращения; повторяется, при этом в регистре 24 приращения модуля угла хранится предыдущее значение приращения. Предлагаемый аксиометр позволяет с высокой точностью вычислять угол поворота руля судна и автоматически регулировать частоту смены информации на индикаторном табло в зависимости от скорости поворота руля. Наличие автоматического переключения значительно уменьшает эффект мерцания цифрового отсчета при неподвижном руле и малых скоростях его поворота в случае попадайия измеряемого значения на границу цифровых отсчетов, что, улучшает восприятие цифровой информации и снижает утомляемость оператора. Формула изобретения Судовой цифровой аксиометр, содержащий генератор импульсов, делитель, первый и второй формирователи, датчик положения пера руля, измеритель модуля угла перекладки руля, первый, второй и третий элементы И, счетчик модуля угла, регист модуля угла, блок уравнения, определитель борта, включающий схему определения Т1риоритета и регистр бор-, та, дешифратор, цифровой и стрелочные индикаторы, при этом выход генератора импульсов через последователь но включенные первый элемент И, счёт чик модуля угла и регистр модуля угла соединен с внешним выходом аксиометра, а через последовательно .включенные делитель, первый формирователь, датчик и второй формирователь - с первым входом измерителя модуля угла перекладки руля, второй вход которого соединен с вторым выходом первого формирователя, первый выход измерителя модуля угла перекладки руля соединен с вторым входом первого элемента И, второй выход вторым входом счетчика модуля угла и первым входом схемы определения прибритета. Третий выход - с вторым вхо дом регистра модуля угла и первым входом регистра борта, четвертый выход - с вторым входом схемы ния приоритета, выходы которой через регистры борта соединены с внешними выходами аксиометраj кроме Того выход дешифратора соединен с входом ци рового индикатора, о т ли чающийся тем, что, с целью улучшения эксплуатационных характеристик аксиометра, в него введены таймер, распределительный блок, триггер yfiравления, реверсивньгй счетчик, дешиф ратор нуля, регистр приращения модул угла, дополнительный регистр модуля угла, управляемый делитель, первый и второй дополнительнью регистры 6o|iita и третий формирователь, при этом пер вый вход распределительного блока соединен с вторым выходом измерителя модуля угла перекладки руля и входом таймера, второй вход распределительного блока - с выходом таймера, третий вход - с третьим выходом измерителя модуля угла перекладки руля и первым входом управляемого делителя, а выходы распределительного блока соответственно соединены с первыми входами блока сравнения, второго дополнительного регистра борта, регистра приращения модуля угла, реверсивного счфтчика второго и третьего элементов И и первым установочным входом триггера управления, второй установочный вход которого соединен с выходом третьего формирователя, счетный вход триггера управления с выходом дешифратора нуля, а прямой и инверсный выходы - с вторыми входами соответственно второго и третьего элементов И, у которых-третьи входы соединены с выходом первого элемента И, а выходы - соответственно с вторым и третьим входами реверсивного счетчика, выход которого в свою очередь соединен с входом дешифратора нуля и вторым входом регистра приращения модуля угла, у которого выход соединен с вторым входом управляемого делителя, выход управляемого делителя соединен с первыми входами первого дополнительного регистра борта и дополнительного регистра модуля угла, у которого вход соединен с выходом счетчика модуля угла, а выход с дешифратором, кроме того, выход блока сравнения соединен с входом третьего формирователя, а его второй и третий входы соединены с выходами второго дополнительного регистра борта, четвертый и пятый входы блока сравнения соединены с выходами схемы определения приоритета и соответственно с вторыми и третьими входами первого и второго дополнительных регистров борта, при этом ыходы первого дополнительного регистра борта соединены с входами трелочных индикаторов. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР по заявке Н- ,кл.В 63 Н 25/ОА, 1977.
