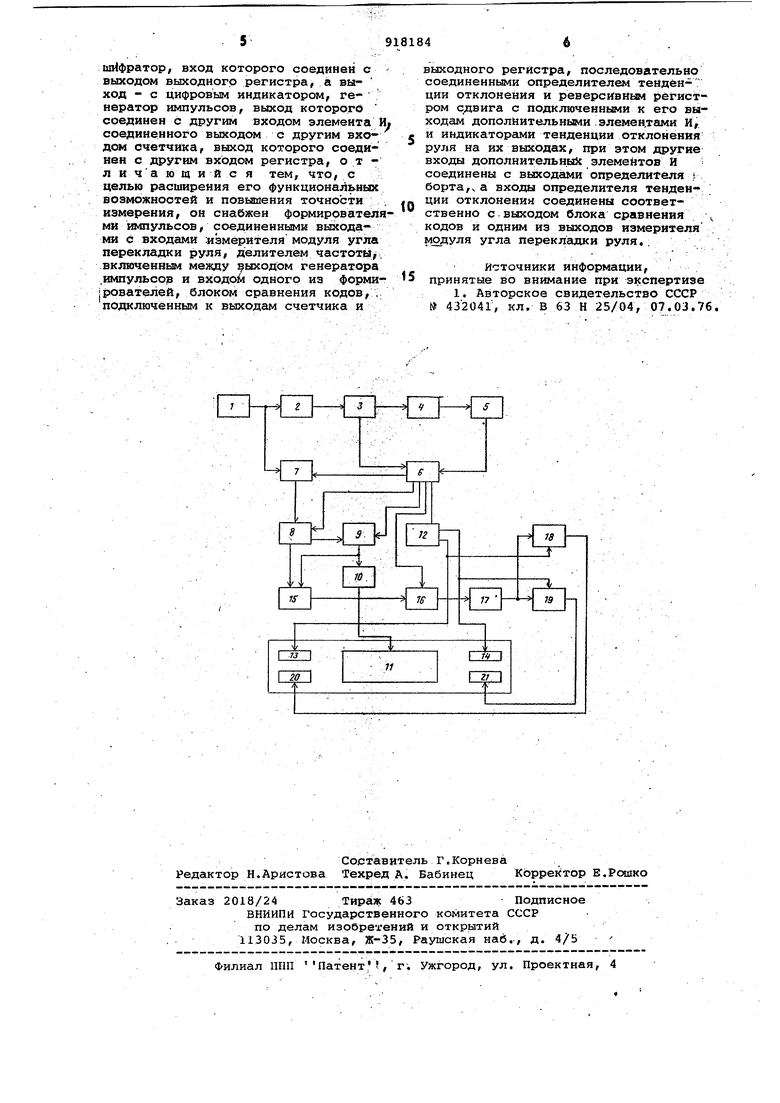
Аксиометр содержит генератор 1 импульсов (кварцевый), соединенный Через последовательно соединенные д литель 2 и один из формирователей 3 с входом датчика 4 положения пера руля, выход которого подключен чер другой формирователь 5 к одному из входов измерителя б модуля угла перекладки руля, другой вход.которо I го подключен к выходу формирователя 3. Одни из выходов измерителя 6 подключены.к одним из входов элемента 7 И, счетчика 8 и выходного регистра 9, подключенного своим выходом через дешифратор 10 к цифрово му индикатору 11, Измеритель 6 подключей также к определителю 12 борта, к выходамкоторого подключены указатели 13, 14 борта. Аксиометр содержит также блок 15 -сравнения кодов., подключенный входами к выходам счетчика 8 и регистра 9, а выходом - к одному из входов определителя 16 тенденции отклонени другой вход которого соединен с одним из выходов измерителя б, а:выход - с входом реверсивного регистра 17 сдвига , подключенного выходом через дополнительные элементы 18 и 19 И индикаторам 20 и 21 тенденции отклонения руля. Другие входы элементов 18 и 19 подключены к выходам определителя 12 борта. Работа аксиометра происходит следующим образом. Сигнал кварцевого генератора 1 импульсов поступает на вход делителя 2, коэффициент деления которого выби рается из условия требуемой дискретности отсчета. С выхода делителя 2 сигнал через один из формирователей 3 поступает в виде опорной синусоиды на вход датчика 4 ив виде им.пульса управления, - на вход измерителя 6 модуля угла перекладки руля, на второй вход которого поступает сформированный на другом формирователе 5 выходной сигнал с датчика 4 Измеритель б выделя.ет временной . интервал между опорным и измеряемым сигналами, в течение которого импуль,сы с генератора 1 через элемент И .7 поступают на вход счетчика 8. Он же формирует импульсы сброса счетчика 8, занесения содержимого счетчика 8 в вькодной регистр .9, сигнал на сравнение кодов и команды управления для работы определителя 12 борта. После окончания счета, пе ред занесением содержимого счетчика 8 в выходной регистр 9 в блоке 15 сравнения кодов происходит сравнение кодов в счетчике 8 и в выходном регистре 9 по принципу больше равно, меньше. На основании .этого определитель 16 тбвденции выра батывает с.игналы для управления реверсивным регистром 17 сдвига, который может находиться в тре-х состояниях: сдвиг влево, сдвиг вправо, сброс О, соответствующие тенденции пера руля влево, вправо и руль неподвижен . Сигнал на регистр 17 подается с выхода формирователя 3 через измеритель б и определитель 16 тенденции, где он делится до единиц . информация с регистра 17 через элементы 18 и 19 поступает на индикаторы 20 и 21 тенденции. Индикаторы 20 и 21 расположены слева и справа от цифрового индика тора 11. Информация выведена в вид табло бегущей волн ы влево или вправо, при остановке руля движение волны прекращается. Тенденция определяется в каждом цикле измерения, и рулевой практически мгновенно получает информацию об изменении поло- , жения руля. При включений цифрового аксиометра в автоматизированный комплекс управления объектом на БЦВМ поступает с выходного регистра код модуля отклонения в диапазоне О - 40°, с дискретностью О, l , .. с задаваемой от БЦВМ частотой вы борки. Рабочая частота датчика может изменяться в пределах от сотен герц до нескольких килогерц.и требует только перестройки фазосдвигающей. цепочки на выходе датчика, при этом частота генератора выбирается из соотношения РГ ИРд, где PJ. - частота генератора; k - коэффициент деления делит Рд- частота датчика. Аксиометр позволяет индицировать недостающую рулевому информацию (при цифровом виде отображения) о тенденции отклонения пера руля в каждый момент времени. Повышение точности преобразования и получение информации о тенденции поворота пера руля являются очень важными параметрами при проведении швартовочных работ, прохождении узостей фарватера, для проведения дноуглубительных работ судами - земснарядами, углубляющш«и фарватер. Формула изобретения Судовой цифровой аксиометр, содержащий датчик положения пера руля, измеритель мОдуля угла перекладки руля, выхода которого соединены с одними из входов элемента И и счетчи- . ка и входами выходного регистра и определителя бор-га, выходы которого соединены с указателями борта, дешифратор, вход которого соединен с выходом выходного регистра, а выход - с цифровым индикатором, генератор импульсов, выход которого соединен с другим входом элемента И; соединенного выходом с другим входом счетчика, выход которого соединен с другим входом регистра, от л и ча ющ и и с я тем, что, с целью расширения его функциональных возможностей и повышения точности , измерения, он снабжен формирователями импульсов, соединенными выходами с входами измерителя модуля угла перекладки руля, делителем частоты, включенным между ыходом генератора .импульсов и входов одного из форми||зователей, блоком сравнения кодов, , подключённым к выходам счетчика и
выходного регистра, последовательно соединенными определителем тенденции отклонения и реверсивным регистром с.двига с подключенными к его выходам дополнительными элементами И, и индикаторами тенденции отклонения руля на их выходах, при этом другие входы дoпoлнитeльныk элементов И соединены с выходами определителя борта,V а входы определителя тенденции отклонения соединены соответ0ственно с выходом блока сравнения кодов и одним из выходов измерителя модуля угла перекладки руля.
Источники информации,
5 принятые вО внимание при экспертизе
1. Авторское свидетельство СССР № 43204Г, кл. В 63 Н 25/04, 07.03.76,
| название | год | авторы | номер документа |
|---|---|---|---|
| Судовой цифровой аксиометр | 1978 |
|
SU921965A1 |
| БОРТОВОЙ АКСИОМЕТР ПЕРЕКЛАДКИ РУЛЯ | 1972 |
|
SU432041A1 |
| Судовой цифровой аксиометр | 1979 |
|
SU977279A2 |
| Указатель положения руля | 1982 |
|
SU1041420A1 |
| Судовой цифровой курсоуказатель | 1976 |
|
SU634293A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ДВИГАТЕЛЕЙ ВНУТРЕННЕГО СГОРАНИЯ И ЭКСПЕРТНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2571693C1 |
| Система управления электрогидравлической рулевой машиной | 1988 |
|
SU1518199A2 |
| Устройство для измерения внутренних напряжений в гальванических покрытиях | 1985 |
|
SU1296863A1 |
| БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2013 |
|
RU2563333C2 |
| Цифровой измеритель угловой скорости | 1988 |
|
SU1509741A1 |
