(5t) УСТРОЙСТВО ДЛЯ ГИБКИ ТРУБ

| название | год | авторы | номер документа |
|---|---|---|---|
| Универсально-гибочный автомат для изготовления деталей малых серий | 1988 |
|
SU1637891A1 |
| НОЖНОЙ ТРУБОГИБ ГУЛЕВСКОГО | 2000 |
|
RU2191081C2 |
| Устройство для формования изделий "мюзле | 1977 |
|
SU751485A1 |
| Трубогибочная машина | 1973 |
|
SU467556A1 |
| Станок для гибки труб | 1991 |
|
SU1817719A3 |
| Способ поперечной гибки профилированного или продольно-гофрированного листового металла и устройство для его осуществления | 1981 |
|
SU1207390A3 |
| Автомат для изготовления двухспиральных пружин с отогнутыми концами | 1985 |
|
SU1294442A1 |
| Станок для загибки и отрезки концов трубных спиралей | 1981 |
|
SU986541A1 |
| УСТРОЙСТВО ДЛЯ РЕЗКИ ТРУБ | 1997 |
|
RU2128277C1 |
| Ручной трубогиб | 1982 |
|
SU1118450A1 |








1
Изобретение относится к трубогибочному производству и может быть использовано при строительно-монтак ных работах для получения криволинейных участков трубопроводов.
Известно устройство для гибки труб, содержащее станину, гибочный узел в виде установленного на ползуне приводного гибочного элемента с канавкой, соответствующей диаметру изгибаемой .трубы, двух опорных роликов, установленных на осях с возможностью перемещения относительно друг друга, и поворотных упоров .
Недостатком указанного устройства ,5 является ограничение технологических возможностей, не позволяющих гнуть трубы различных диаметров без значительной переналадки устройства.
Целью изобретения является расши- 20 рение номенклатуры обрабатываемых изделий.
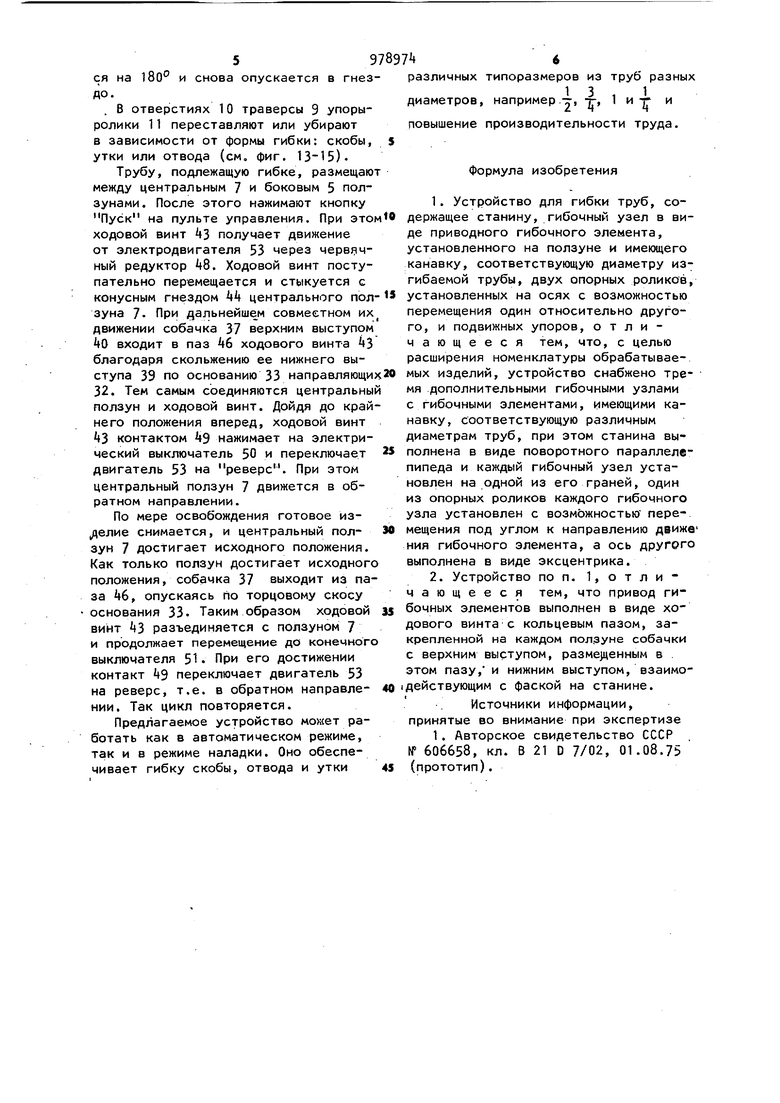
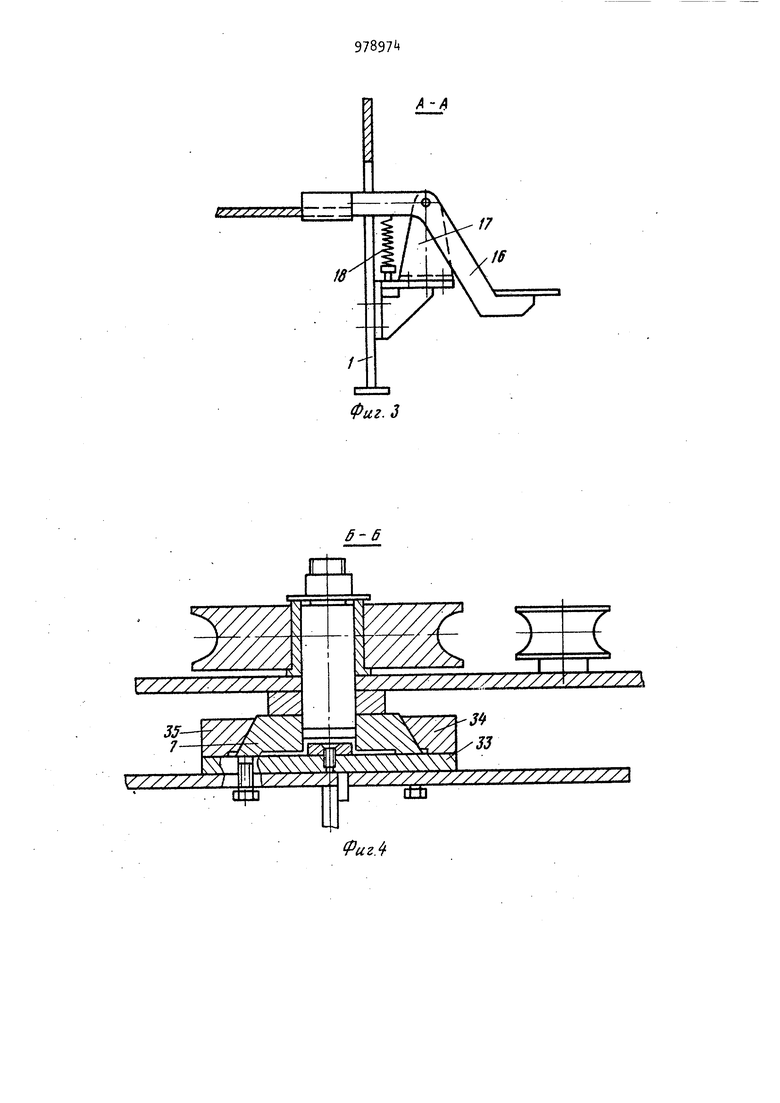
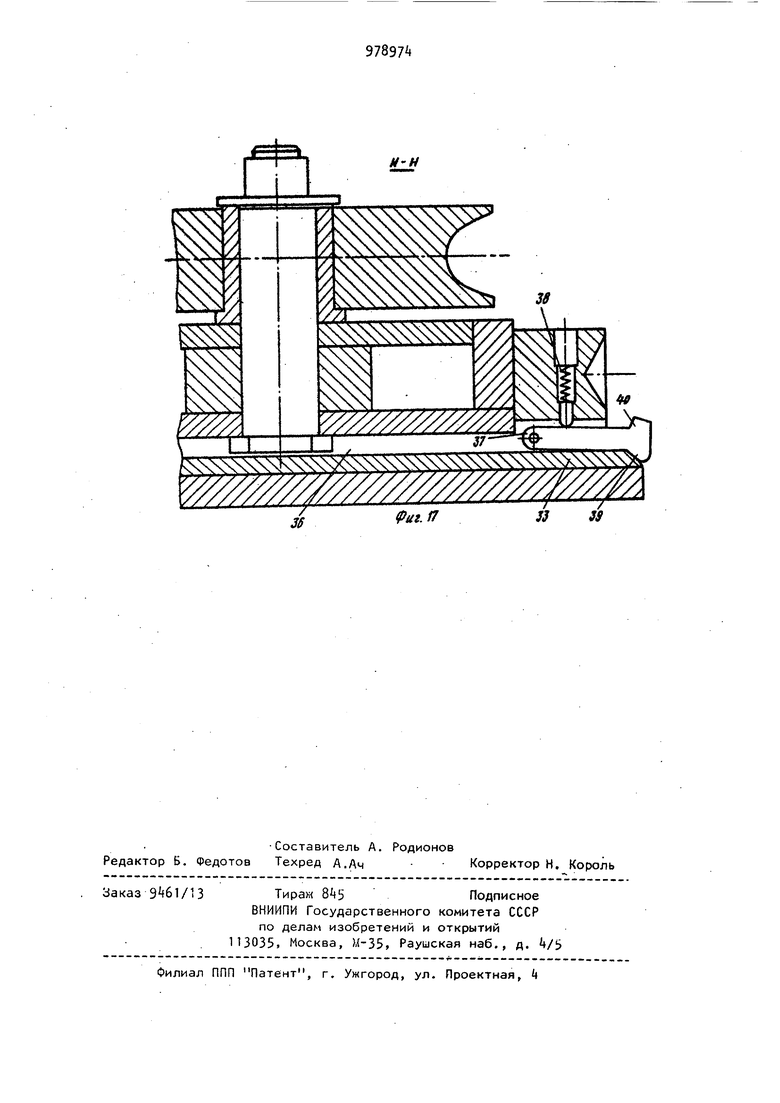
Поставленная цель достигается тем, что устройство для гибки труб, содержащее станину, гибочный узел в виде установленного на ползуне приводного гибочного элемента с канавкой.соответствующей диаметру изгибаемой трубы, двух опорных роликов, установленных на осях с возможностью перемещения относительно друг друга, и подвижных упоров, снабжено тремя дополнительными гибочными узлами с гибочными элементами, имеющими канавку, соответствующую различным диаметрам труб; при этом станина выполнена в виде поворотного параллелепипеда и каждый гибочный узел установлен на одной из его граней, один из опорных роликов каждого гибочного узла установлен с возможностью перемещения под углом к направлению движения гибочного элемента , а ось другого выполнена в виде эксцентрика. Привод гибочных элементов выполнен в виде ходового винта с кольцевым пазом, закрепленной на каждом ползуне собачки с верхним выступом, размещенным в этом пазу, и нижним выступом, взаимодействующим с фаской на станине. На. фиг. 1 показано предлагаемое устройство, вид спереди; на фиг. 2 то же, вид сверху; на фиг. 3 педал в сечении А-А фиг. 1; на фиг. 4 - се чение центрального ползуна с роликом по Б-Б на фиг. 2; на фиг. 5 - сечение опорного ролика по В-В на фиг. 2 на фиг. 6 - сечение опорного ролика по Г-Г на фиг. 2; на фиг. 7 - боковой ползун, вид сверху; на фиг. 8 ;сечение Д-Д фиг. 7; на фиг. 9 сечение Е-Е фиг. 1; на фиг. 10 - сечение редуктора по Ж-Ж на фиг. 2; на фиг. 11 - ротор, вид-сверху; на фиг. 12 - сечение ротора 3-3 фиг. 11 на фиг. 13 - схема гибки скобы; на фиг. 14 - схема гибки утки; на фиг.1 схема гибки отвода; на фиг. 16 - соединение ходового винта с центральным ползуном; на фиг. 17 - сечение Н-Н фиг. 11. . Внутри рамы 1 на валу 2 размещена станина 3 в форме параллелепипеда. На каждой рабочей плоскости станины смонтированы опорный ролик 4, боково ползун 5 с роликом 6, центральный ползун 7 с роликом 8 и с траверсой 9 имеющей отверстия 10 для закрепления упоров-роликов 11 с помощью фиксирую щего пальца 12. Станина выполнена та ким образом, что к фланцам вала 2 перпендикулярно прикрепляется плоская квадратная плита 13, к которой приварены плоскости, являющиеся рабо чими столами 1. Каждый из столов имеет паз 15, в который через окно рамы 1 вставлен рычаг педали 16, шар нирно соединенной с кронштейном 17, прикрепленным к раме, и снабженной пружиной 18 возврата в исходное поло жение при ее отпускании. На шейку ва ла 2 насажен штурйал 19. К столу. 1 приварена бобышка 20 с прямоугольным гнездом 21, в которое входит ось 22 с эксцентричной шейкой под опорный ролик k. Боковой ползун 3 снабжен сухарями 23 и 2t, между которыми установлена пружина 25. Каждый из суха рей имеет выступ 2б или 27, взаимодействующий с зубчатой рейкой 28, жестко закрепленной на направляющих 29, установленных под углом 45 к. на правлению гибки. Сухари 23 и 2k имеют рукоятки 30 и 31, с помощью которых выступы 26 и 27 выводятся из зацепления с зубцами рейки 28 для передвижения до нужного положения по направляющим 29. Центральный ползун 7 установлен в направляющих 32, состоящих из основания 33 и боковых клиньев 3 и 35. В нижней части ползуна 7 имеется паз Зб, в котором шарнирно установлена собачка 37, отжимаемая подпружиненным упором 38. Собачка 37 имеет головку с выступами 39 и Q. Нижний выступ 39 одной стороной упирается в боковой торец основания 33, а другой стороной в угольник 1 для предотвращения самопроизвольного перемещения ползуна 7 при повороте станины 3. Верхним выступом 0 собачка 37 входит в канавку k2 ходового винта 3 при стыковке его конусной опорной части с конусным гнездом kk на заднем торце ползуна 7. Ходовой винт 3 соединен посредством резьбы с червячным колесом 45, играющим роль гайки, и имеет продольный паз 6, в который входит шпонка 47, неподвижно соединенная с корпусом редуктора 48. Благодаря такому устройству ходовой винт 43 может совершать только возвратно-поступательное движение. На свободном конце винта 43 закреплен контакт 49, замыкающийся с электрическими выключателями 50 и 51, установленными на кронштейне 52, для выключения и переключения электродвигателя 53. Электродвигатель 53 с приводным механизмом смонтирован на раме 1 отдельно от станины 3. Устройство для гибки труб работает следующим образом. Перед гибкой скобы, отвода или утки в зависимости от их типоразмеров из труб с диаметрами 1 3 1 J Т Т 1Г производится установка соответствующего стола k поворотом станины 3 вокруг горизонтальной оси с помощью штурвала 19 и стопорится рычагом педали 16, входящим в паз 15 на станине-роторе 3 Затем, сжимая рукоятки 30 и 31, выводят сухари 23 и 2k из зацепления с зубчатой рейкой 28 и передвигают боковой ползун 5 по направляющим 29 в заданное положение относительно опорного ролика k. После этого происходит его фиксация при освобождении рукояток 30 и 31 от сжатия. В случае гибки утки опорный ролик k вместе с осью 22 выводится из прямоугольного .гнезда 21, поворачиваети снова опускается в гнез В отверстиях 10 траверсы 9 упорыролики 11 переставляют или убирают в зависимости от формы гибки: скобы, утки или отвода (см, фиг. ). Трубу, подлежащую гибке, размещаю между центральным 7 и боковым 5 ползунами , После этого нажимают кнопку Пуск на пульте управления. При это ходовой винт 3 получает движение от электродвигателя 53 через червечный редуктор 48. Ходовой винт поступательно перемещается и стыкуется с конусным гнездом k центрального пол зуна 7- При дальнейшем совместном их движении собачка 37 верхним выступом 40 входит в паз 46 ходового винта 43 благодаря скольжению ее нижнего выступа 39 по основанию 33 направляющи 32. Тем самым соединяются центральны ползун и ходовой винт. Дойдя до край него положения вперед, ходовой винт 43 контактом 49 нажимает на электрический выключатель 50 и переключает двигатель 53 на реверс. При этом центральный ползун 7 движется в обратном направлении. По мере освобождения готовое изделие снимается, и центральный ползун 7 достигает исходного положения. Как только ползун достигает исходного положения, собачка 37 выходит из паза 46, опускаясь по торцовому скосу основания 33. Таким образом ходовой винт 43 разъединяется с ползуном 7 и продолжает перемещение до конечного выключателя 51 При его достижении контакт 49 переключает двигатель 53 на реверс, т.е. в обратном направлении. Так цикл повторяется. Предлагаемое устройство может работать как в автоматическом режиме, так и в режиме наладки. Оно обеспечивает гибку скобы, отвода и утки труб разных различных типоразмеров из 1 3 1 и т и диаметров, например.-;;, -г-, 2 Ц k повышение производительности труда. Формула изобретения 1. Устройство для гибки труб, СОдержащее станину, гибочный узел в виде приводного гибочного элемента, установленного на ползуне и имещего канавку, соответствующую диаметру изгибаемой трубы, двух опорных роликов. установленных на осях с возможностью перемещения один относительно другого, и подвижных упоров, отличающееся тем, что, с целью расширения номенклатуры обрабатываемых изделий, устройство снабжено тремя дополнительными гибочными узлами с гибочными элементами, имеющими канавку, соответствующую различным диаметрам труб, при этом станина выполнена в виде поворотного параллелепипеда и каждый гибочный узел установлен на одной из его граней, один из опорных роликов каждого гибочного узла установлен с возможностью перемещения под углом к направлению движв ния гибочного элемента, а ось другого выполнена в виде эксцентрика. 2. Устройство по п. 1, о т л и чающееся тем, что привод гибочных элементов выполнен в виде ходового винта с кольцевым пазом, закрепленной на каждом ползуне собачки с верхним выступом, разме ценным в . этом пазу, и нижним выступом, взаимоДействующим с фаской на станине. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 606658, кл. В 21 D 7/02, 01.08.75 (прототип).
А-/
/ / / / / /
17
Фиг. 5
U2. 6
Фиг. 7 f
23
Фиг.в
fE
Ж-Д
чв
ш
.W z
ЧВ|Мпмв
3-J
/
пр4
t
. /г
Фи,г. /
иг. /6
