Изобретение относится к технике измерения масс в невесомости.
Известен способ измерения массы тела в условиях невесомости, основанный на вращении тела вокруг фиксированной оси и измерении центробежной
Недостатком данного способа и устройства для его осуществления является невысокая точность,
Наиболее близким по технической сущности к изобретению является способ, реализованный в центробежнах весах, включающий вращение тела вокруг оси, не проходящей через его центр масс, и фиксирование сигнала с датчика центробежной .
Наиболее близким к предложенному по технической сущности являются центробежные весы, содержащие грузоприемный механизм, соединенный посоедством рычагов с валом/ на которых расположены тензодатчики, связанные с приводом его вращения, причем тензодатчики через контактные кольца связаны с измерительным прибором 2 J.
Недостатком известного способа и устройства ягвляется невысокая точность при измерении.
Цель изобретения - повышение точности измерения.
Указанная цель достигается тем, что величину сигнала фиксируют при двух положениях тела, характеризующихся pasHbnvm- расстояниями от оси вращения и поворотом на 180 относительно оси, перпендикулярной оси вра10щения.
В устройстве для осуществляения способа рычаг с грузоприемным механизмом выполнен телескопическим с винтовой канавкой, снабженной фиксаторами двух положений рычага с поворо15том на 180 причем тензодатчики расположены на наружной поверхности рычага у его основания.
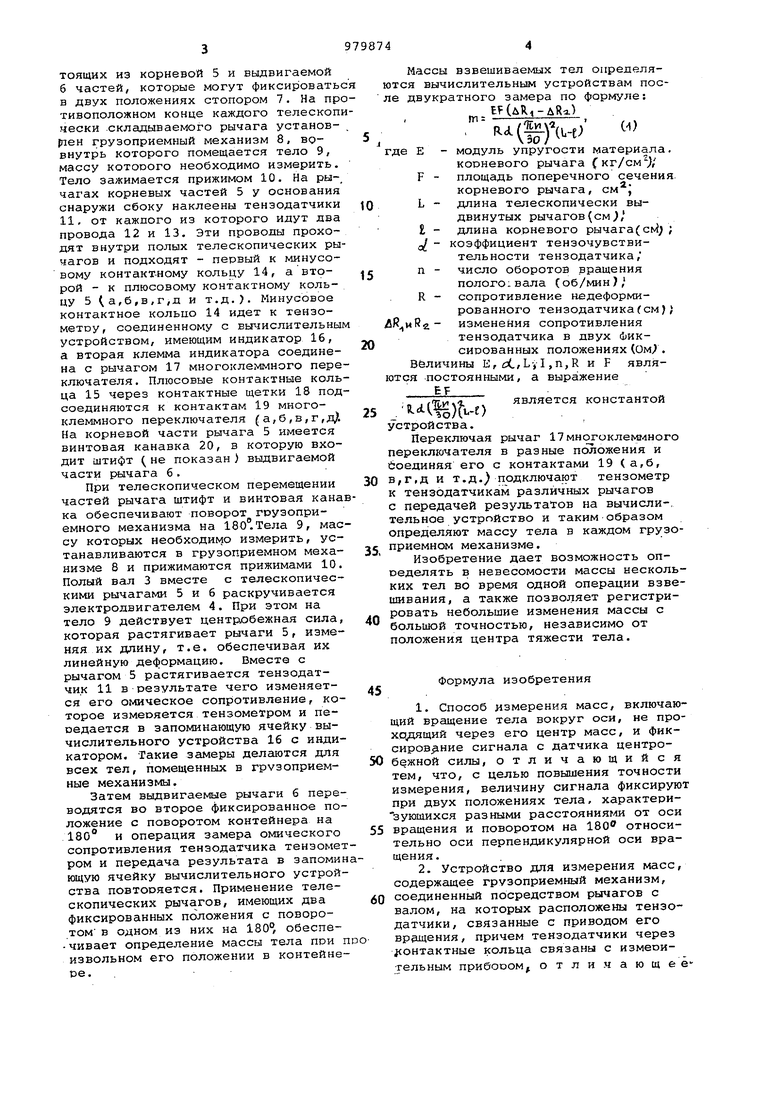
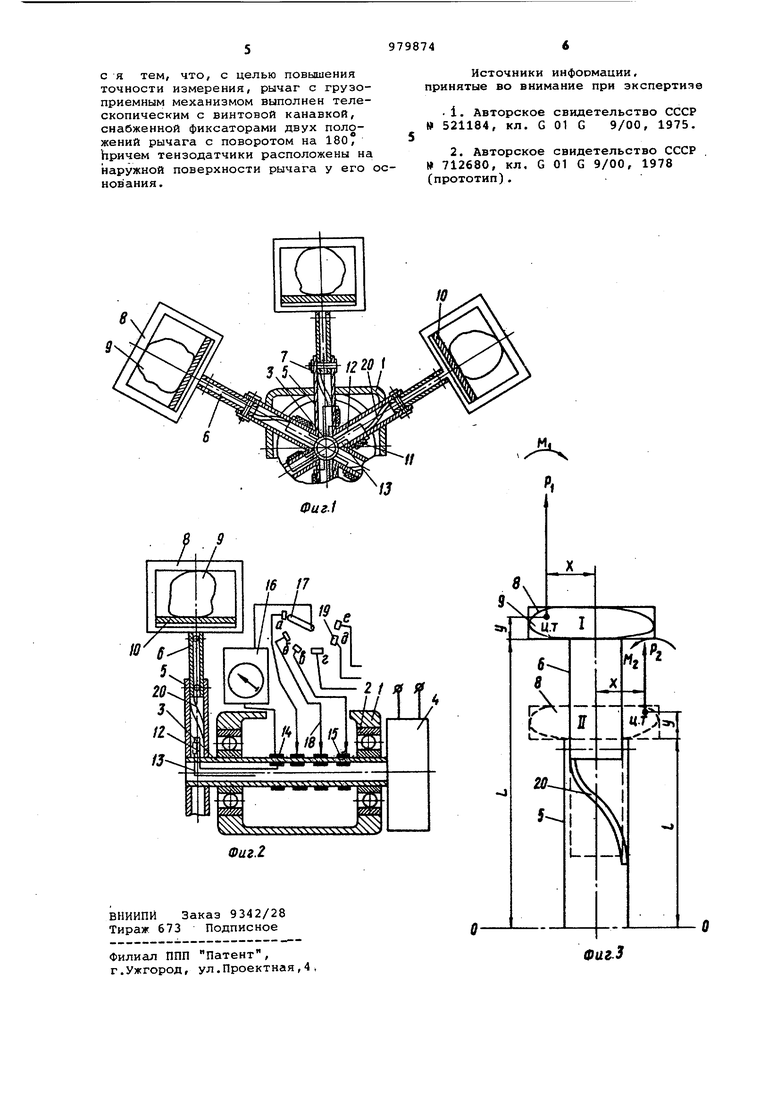
На фиг. 1 показано предложенное устройство (вид с торца)/ на фиг.2 20то же, продольный разрез, на фиг.З схема двух фиксированных по;южений телескопического рычага с поворотом грузоприемного устройства на 180.
Устройство лля измерения масс, реа2 лизукяцее способ измерения массы тела, состоит из корпуса 1, в котором на-подшипниках 2 установлен полый вал 3, вращаемый электродвигателем 4 На конце полого вала 3 имеется не30сколько телескопических рычагор, состоящих из корневой 5 и выдвигаемой б частей, которые могут фиксировать в двух положениях стопором 7. На пр тивоположном конце каждого телескоп чески .складываемого рычага установ(пен грузоприемный механизм 8, вовнутрь которого помещается тело 9, массу КОТОРОГО необходимо измерить. Тело зажимается прижимом 10. На рычагах корневых частей 5 у основания снаружи сбоку наклеены тензодатчики 11, от каждого из которого идут два провода 12 и 13. Эти проводы проходят внутри полых телескопических ры чагов и подходят - первый к минусовому контакт-ному кольцу 14, а второй - к плюсовому контактному кольцу 5 а,6,в,г,д и т.д.)- Минусовое контактное кольцо 14 идет к тензометру, соединенному с вычислительны устройством, имеющим индикатор 16, а вторая клемма индикатора соединена с рычагом 17 многоклеммного пере ключателя. Плюсовые контактные коль ца 15 через контактные щетки 18 под соединяются к контактам 19 многоклеммного переключателя (а,б,в,г,д. На корневой части рычага 5 имеется винтовая канавка 20, в которую входит штифт (не показан ) выдвигаемой части рычага 6. При телескопическом перемещении частей рычага штифт и винтовая кана ка обеспечивают поворот гсузоприемного механизма на 180°. Тела 9, мас су которых необходи1у1о измерить, устанавливаются в грузоприемном механизме 8 и прижимаются прижимами 10. Полый вал 3 вместе с телескопическими рычагами 5 и б раскручивается электродвигателем 4. При этом на тело 9 действует центриобежная сила, которая растягивает рычаги 5, изменяя их длину, т.е. обеспечивая их линейную деформацию. Вместе с рычагом 5 растягивается тензодатчик 11 в результате чего изменяется его омическое сопротивление, которое измеряется тензометром и передается в запоминающую ячейку вычислительного устройства 16 с индикатором. Такие замеры делаются для всех тел, помещенных в грузоприемные механизмы. Затем выдвигаемые рычаги б переводятся во второе фиксированное положение с поворотом контейнера на ISO и операция замера омического сопротивления тензодатчика тензомет ром и передача результата в запомин ющую ячейку вычислительного устройства повторяется. Применение телескопических рычагов, имеющих два фиксированных положения с поворотом в одном из них на 180°, обеспе-чивает определение массы тела ПРИ п извольном его положении в контейнеОе. . Массы взвешиваемых тел определяются вычислительным устройствам после двукратного замера по формуле: ..EFUR,-ARa) )Vt; где Е - модуль упругости материала. корневого рычага (кг/смЛ F - площадь поперечного сечения корневого рычага, L - длина телескопически выдвинутых рычагов (см J, - длина корневого рычага( CN}; ; yl - коэффициент тензочувствительности тензодатчика, п - число оборотов вращения ПОЛОГО: в ала (об/мин}, R - сопротивление недеформированного тензодатчика(см); изменения сопротивления тензодатчика в двух Фиксированных положениях(ОмЛ. Величины E,oC,LvI,n,R и F являются постоянными, а выражение Ef ;- ,j2y;.e является константой устройства. Переключая рычаг 17многоклем14ного переключателя в разные положения и Соединяя его с контактами 19 ( а,б, в,г,д и т.д.) подключают тензометр к тензодатчикам различных рычагов с передачей результатов на вычисли-, тельное устройство и таким образом определяют массу тела в каждом грузоприемном механизме. Изобретение дает возможность определять в невесомости массы нескольких тел во время одной операции взвешивания, а также позволяет регистрировать небольшие изменения массы с большой точностью, независимо от положения центра тяжести тела. Формула изобретения 1.Способ измерения масс, включающий вращение тела вокруг оси, не прохсугящий через его центр масс/ и фиксиров ние сигнала с датчика центробежной силы, отличающийся тем, что, с целью повышения точности измерения, величину сигнала фиксируют при двух положениях тела, характеризующихся разными расстоянияг/ш от оси вращения и поворотом на 180 относительно оси перпендикулярной оси вращения. 2.Устройство для измерения масс, содержащее грузоприемный механизм, соединенный посредством рычагов с валом, на которых расположены тензодатчики, связанные с приводом его вращения, причем тензодатчики через {oнтaктныe кольца связаны с измерительным приборомд отлинающеес я тем, что, с целью повышения точности измерения, рычаг с груэоприемным механизмом выполнен телескопическим с винтовой канавкой, снабженной фиксаторами двух положений рычага с поворотом на 180, Ьричем тензодатчики расположены на наружной поверхности рычага у его основания .
Источники инфоомаиии, принятые во внимание при экспертизе
1. Авторское свидетельство СССР 521184, кл. G 01 G 9/00, 1975.
2. Авторское свидетельство СССР 712680, кл, G 01 G 9/00, 1978 (прототип).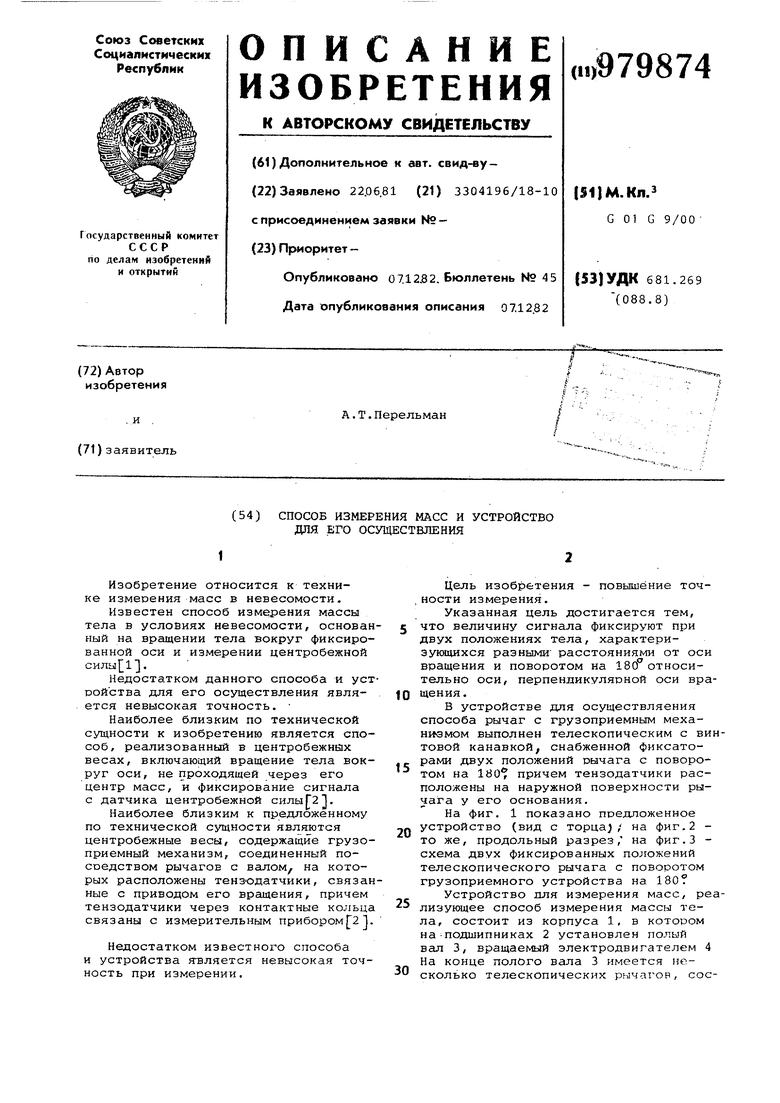
в
16 /7
19
