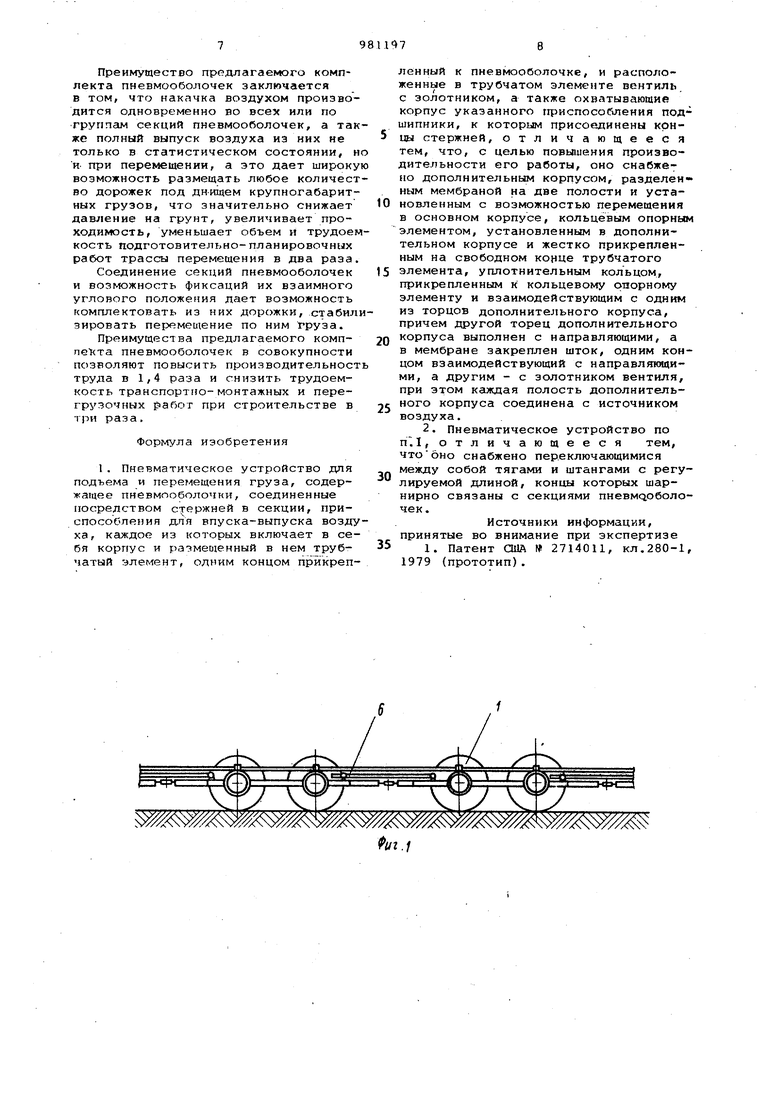
Изобретение относится к подъемнотранспортным механизмам и может быть использовано для перегрузки и перево Гки крупногабаритных объектов. Известно устройство для подъема и перемещения крупногабаритных и тяжеловесных грузов, содержащее пневмоЪболочки, соединенные посредст вом стержней в секции, приспособлени для впуска-выпуска воздуха, каждое из которых включаетв себя kopnyc и размещенный в нем трубчатый элемент, одним концом прикрепленный к пневмооболочке, и расположенные в трубчатом элементе вентиль .с золотником, а также охватывающие корпус указанно приспособления подшипники, к которым присоединены концы стержней 1. Недостатком известного устройства является сравнительно низкая произво дительность его работы. Цель изобретения - повышение производительности работы устройства. Поставленная цель достигается тем что устройство снабжено дополнительным корпусом, раз 1еленным мембраной на две полости и установленным с возможностью перемещения в основном корпусе, кольцевым опорным элементом установленном в дополнительном корпусе и жестко прикрепленным на свободном конце трубчатого элемента, уплотнительным кольцом/ прикрепленным к кольцевому опорному элементу и взаимодействующим с одним из торцов доплнительногр корпуса, причем другой торец дополнительного корпуса выполнен с направляющими, а в мембране закреплен шток, одним концом взаимодействующий с направляющими, а другимс зрлотником вентиля, при этом каждая полость дополнительного корпуса соединена с источником воздуха, а .само устройство снабжено перекрещивающимися между собой тягами и штангами с регулируемой длиной, концы которых шарнирно связаны с секциями пневмооболочек. На фиг.1схематически изображены секции пневмооболочек, общий вид; на ,фиг.2 - то же, вид в плане; на фиг.Зприспособления впуска-выпуска воздуха пневмооболочек,. продольный разрез; на фиг. 4 - схема пневматической сети секций пневмооболочек; на фиг.5 схема подвода секций пневмооболочек под груз на фиг.6 - схема подъема груза; на фиг. 7 - схемы перемещения груза по внешней поверхности пневмооболочек, общий вид; на фиг.8 - то же, вид в плане; на фиг,9 - схема поворота груза при его перемещении кривой, вид в плане. Пневматическое устройство состои из сгруппированных в секции, затем в дорожки пневмооболочек 1. Пневмооболочки 1 в секции с вяутренней ст роны соединяются между собой стержнями 2 с наконечниками 3. Геометрические оси пневмооболочек 1 и након ников 3 совпадают. С внешней стороны, К пневмооболо кам 1,наконечниками 3 присоединяютс тяги 4 арочного типа с шарнир ами 5, при помощи которых секции соединяют ся и комплектуются в дорожки, причем они дают возможность секциям повора чиваться относительно друг друга в горизонтальной и поперечной плоскос тях. Для стабилизации прямолинейного и криволинейного движения тя-. ги 4 соседних секций с одной стороны соединяются установочными штангами б с регулируемой длиной, ПОЗВОЛЯЮ1ЦИМИ устанавливать различное углово.е положение секций относительно друг друга. На одной стороне пневмооболочки к торцу прикреплен трубчатый элемент 7, внутри которого плотно заФиксирован через уплотнительную шайбу 8 гайкой 9 корпус вентиля 10 с золотником 11, а снаружи подвижно на ней устанавливается приспособ ление 12 впуска-выпуска воздуха с помощью втулки 13 и опоры 14, которая пло но закрепляется на трубчатом элементе- 7 через шайбу 15 гайкой 16 и на ее переднем торце устанавливается уплотнительное кольцо 17 из анти фрикционного полимера, например фторопласта 4. Для управления золотником 11 приспособление 12 впуска-выпуска воздуха имеет дополнительный корпус с полостями А и Б пневмоцилидра 18, направляющими 19, в которые входит шток 20 с головкой мембраны 21 и снаружи воздухопроводный тройник 22. Корпус полости Б вместе с мембраной 21 соединяется с корпус А,, а снаружи устанавливаются воздухопроводный тройник 23 и корпус 24с втулкой 13, на внешней поверхн сти которого через распорную втулку 25установлены сферические подшипни ки 26 накоЕгечников 3 из антифрикционного полимера, например, капролона. На другой стороне пневмооболочки 1 прикрепляется цапфа, аналогичная элементу 7, внутри с корпусом венти ля 10 и предохранительным клапаном 27, а снаружи устанавливаются подшипники 26 наконечников 3 через вту ку 25. Для управления рабочим процессом комплект пневмооболочки содержит пневмрсети, соединяющие Компрессор 28 через арматуру управления на выносном пультес приспособлениями 12 впуска-выпуска воздуха и пневмоцилиндрами 15, а так как устройство, соединенное с пневмоцилиндром (дополнительный корпус), подвижно на трубчатом элементе 7 и опоре 14, то пневмосеть выполнена с групповым впускомвыпуском воздуха секций пн евмооболочек 1. На переносном пульте устанавливаются трехходовой кран 29, соединенный воздухопроводом 30 с компрессором 28 и гибкими быстросъемньцуш воздухопроводами 31 и 32 через воздухопроводный тройник 23 с рабочей полостью А приспособления 12 впускавыпуска воздуха, а воздухопрбводом 33 он соединяется с соплом 34, сопло которого через воздухопровод 35, проходной кран 36 и воздухопровод 30 также соединяется с компрессором 28. Другой трехходовой кран 37 пульта управления одной стороной через воздуоэпровод 38 соединяется с компрессором 28, второй стороной - через предохранительный клапан 39, гибкие быстросъемныэ воздухопроводы 40 и 41, тройник 22 - с рабочей полостью Б дополнительного корпуса. Подъем груза 42 производится следующим образом. Под днищем груза 42, установленном на подставках, 43, на высоту протаскиваются тросом дорожки, состоящие из секций пневмооболочек 1, из которых выкачан воздух (фиг.5). Количество и длина дорожек выбираются по эксплуатационным условиям монтажа и параметрами груза. После этого дорожки располагаются по траектории будущего перемещения груза, затем пневмосети пневмоболочек 1, находящихся под днищем груза, подключаются к компрессору 28 через арматуРУ управления, гтаходящуюся на переносном пульте. Для впуска воздуха в пневмооболочки 1 кран 29 и кран 36 закрыты, а кран 37 становится в положение,соединяюшее компрессор 28 через воздухопровод . 38, клапан 39, гибкие быстросъемные воздухопроводы 40, 41 и тройник 22 с полостью Б. Под давлением поступившего в полость Б воздуха мембрана 21 вместе со штоком 20 перемещается в сторону корпуса вентиля 10 до тех пор, пока головка штока 20 не откроет полностью золотник 11. Открыв полностью золотник 11, шток 20 перестает перемещаться, затем начинает перемещаться вправо корпус с полостью А впуска-выпуска воздуха до тех пор, пока торец корпуса плотно прижимается к кольцу 17 опоры 14 скольжения, и тем самым полость А автоматически герметизуется. Когда полость А полностью разобщается с атмосФМ ой, т.е. загерметизируется и срабатыпао в пневмосети пневмоцилнндра J8 предохранительный клапан 39, то кран 37 закрывается. После этого трехходовым краном 29 обеспечивается сообтение компрессора 28 через воздухопровод 30, гибкие быстросъемные воздухопроводы 31 и 32, тройник 23, герметичну полость А и открытый золотник 11 с внутренней полостью каждой пневмоболочки 1 в секциях. Когда давление воздуха при заполнении внутренней по лости пневмооболочек 1 секции достигает рабочего, то груз поднимется на расчетную высоту Н, Затем Подача сжатого воздуха в пневмооболочки прекращается. Для этого кран 29 закр вается, а кран 37 становится в положение сообщения гибких быстросъемиых воздухопроводов 40 и 41 и полости Б пневмоцилиндра 18 с атмосферой При выпуске сжатого воздуха из полости Б пневмоцилиндра 18 мембрана 21 со штоком 20 возвргицается в исходное положение, при этом головка штока 20 отходит от золотника 11 и он закрыва ется, после прекращается выход сжатого воздуха из пневмооболочки 1. Свободные группы секций пневмооболочек 1 подключаются к арматуре управления и заполняются сжатым воздухом до начального давления, которое по в личине значительно меньше, чем у пневмооболочек, находящихся под грузом 42. 1 Процесс управления заполнения сжа Тйм воздухом всех пневмооболочек ана логичен. После этих подготовительных опера ций тяговые средства 44, соединенные тросами 45 с грузом 42, перемещают его по внешней поверхности пневмосекций. Освободившиеся задние секции отсоединяются от секций, находящихся под грузом 42 путем разъединени шарниров 5 тяг 4, штанг б и гибких быстросъемных воздухопроводов 32 и 41 между секциями. Отсоединенные секции пневмооболочек 1 перекатываются и устанавливаются перед грузом 42, затем соединяются спереди остановившихся се ций под грузом 42, причем соединяются все указанные быстросъемные элемен ты. Этот процесс повторяется до тех по пока груз 42 не оказывается при перемещении над фундаментом 46 (ростверком) в нужном положении. После этого груз 42 плавно опускается на фундамен 46 путем - постепенного выпуска сжатого воздуха из пневмооболочек 1, на которых он находится. Для выпуска воздуха из секций пневмооболочек 1,/находящихся под грузом 42, кран 29 становится в положение, когда полость А прирпосор ления 12 впуска-выпуска воздуха, гибкие быс:тросъемные воздухопроводы 31 и 32 и позлухопровод 33 соединяются через эжектор 34 с атмосферой, а кран 37 соединяет компрессор 28 через гибкие быстросъемные и другие воздухопроводы 38, 40 и 41 с полостью Б пневмоцилиндра 18. Когда в полости Б цилиндра 18 воздух достигаем нужного давления, головка штока 20 мембраны 21 открывает полностью золотник 11 корпуса вентиля 10. Под действием силы тяжести груза 42 воздух из внутренней полости каждой пневмооболочки 1 в секциях вытесняется через полость А, гибкие быстросъемные воздухопроводы 31 и 32, кран 29, воздухопровод 33 и сопло 34 в атмосферу. Когда груз 42 опускается на фундамент полностью, то контакт пневмооболочек 1 с днищем еще сохраняется. Устранение контакта пневмооболочек с днищем груза 42 производится удалением из них остаточного воздуха путем включения эжектора 34 в пневмосеть впуска-выпуска воздуха пневмооболочек секций. Для этого открывается кран 36 и сжатый воздух от компрессора -28 устремляется в сопло 34. Благодаря зжекции и герметичности полости А остаточный воздух из пневмооболочек 1 через их пневмосеть выкачиваетая. После отйачки воздуха краном 37, полости Б пневмоцилиндра 18 и гибкие быстросъемные воздухопроводы 40 и 41 сообщаются с атмосферой, тогда давление в его пневмосети падает, шток 20 мембраны 21 возвращается в исходное положение и золотник 11 корпуса вентиля 10 закрывается, пневмооболочка 1 остается в сплюснутом состоянии и контакт ее с грузом 42 теряется. После этих операций воздухопроводы 31 и 40 отключаются от арматуры управления и секции с пневмооболочками 1 удаляются из-под груза 42. На этом оптация подъема, перемещения и опускания груза заканчивается. Для поворота груза 42 при перемещении его по криволинейной траектории, впереди находящиеся секции пневмооболочек поворачиваются относительно друг друга на определенный угол вокруг оси шарниров 5 и фиксируются установочными I штангами б тяг 4. Для уменьшения бокового скольжения пневмооболочек 1, при их движении по криволинейной траектории, углы установки секций наружного и внутреннего рядов дорожки должны иметь разные . величины относительно центра поворота, при этом во внутреннем ряду они должны поворачиваться круче наружных. При перемещении груза 42 тяговыми средствг№1и по внешним поверхйостям пневмооболочек 1, благодаря возникаюей боковой силе трения между, ними и боковой реакции со стороны грунта, происходит его поворот по нужной криволинейной траектории.
Преимущество предлагаемого комплекта пневмооболочек заключается в том, что накачка воздухом производится одновременно во всех или по группам секций пневмооболочек, а также полный выпуск воздуха из них не только в статистическом состоянии, но и при перемещении, а это дает широкую возможность размещать любое количество дорожек под днищем крупногабаритных грузов, что значительно снижает давление на грунт, увеличивает проходимость, уменьшает объем и трудоемкость подготовительно-планировочных работ трассы перемещения в два раза.
Соединение сйкций пневмооболочек и возможность фиксаций их взаимного углового положения дает возможность комплектовать из них дорожки, стабилизировать перемещение по ним груза.
Преимущества предлагаемого комппе ста пневмооболочек в совокупности позволяют повысить производительность труда в 1,4 раза и снизить трудоемкость транспортно-монтажных и перегрузочных pariOT при строительстве в 1ри раза.
Формула изобретения
1. Пневматическое устройство для подъема и перемещения груза, содержащее пневмооболочки, соединенные посредством стержней в секции, приспособления дпя впуска-выпуска воздуха, каждое из которых включает в себя корпус и размещенный в нем трубчатый элемент, одним концом прикрепленный к пневмооболочке, и расположенные в трубчатом элементе вентиль, с золотником, а также охватывающие корпус указанного ггриспособления подшипники, к которым присоездинены крниы стержней, отличающееся тем, что, с целью повышения производительности его работы, оно снабжено дополнительным корпусом, разделенным мембраной на две полости и установленным с возможностью перемещения в основном корпусе, кольцевым опорным элементом, установленным в дополнительном корпусе и жестко прикрепленным на свободном конце трубчатого элемента, уплотнительным кольцом, прикрепленным к кольцевому опорному элементу и взаимодействующим с одним из торцов дополнительного корпуса, причем другой торец дополнительного корпуса выполнен с направляющими, а в мембране закреплен шток, одним концом взаимодействующий с направляющими, а другим - с золотником вентиля, при этом каждая полость дополнительного корпуса соединена с источником воздуха.
2. Пневматическое устройство по п.I, отличающееся тем, чтооно снабжено переключающимися между собой тягами и штангами с регулируемой длиной, концы которых шарнирно связаны с секциями пневм оболочек.
Источники информации, принятые во внимание при экспертизе
1. Патент США № 2714011, кл,280-1, 1979 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневматическое устройство для подъема и перемещения груза | 1986 |
|
SU1588706A1 |
| Сифонный дозатор | 1990 |
|
SU1774177A1 |
| Полуавтомат для тарировки посуды из прозрачного материала | 1958 |
|
SU119685A1 |
| Контейнер | 1986 |
|
SU1395560A1 |
| Пневматическое захватное устройство | 1977 |
|
SU713814A1 |
| Устройство для смазки изложниц | 1983 |
|
SU1194570A1 |
| АВТОМАТИЧЕСКОЕ НАГНЕТАТЕЛЬНОЕ УСТРОЙСТВО ВЫСОКОВЯЗКИХ МАТЕРИАЛОВ | 2012 |
|
RU2499947C1 |
| Прямодействующий автоматический тормоз | 1928 |
|
SU22718A1 |
| Передвижная ограждающая крепь | 1985 |
|
SU1265335A1 |
| Этажный пневматический водоподъемник | 1934 |
|
SU49850A1 |
m $ mf$sm s$m $m; f m m //6W// $w/ $ Фиг.5 Ji f sS$$C ; i SS§$ Фиг.6 .
