(54) ПНЕВМАТИЧЕСКОЕ ЗАХВАТНОЕ УСТРОЙСТВО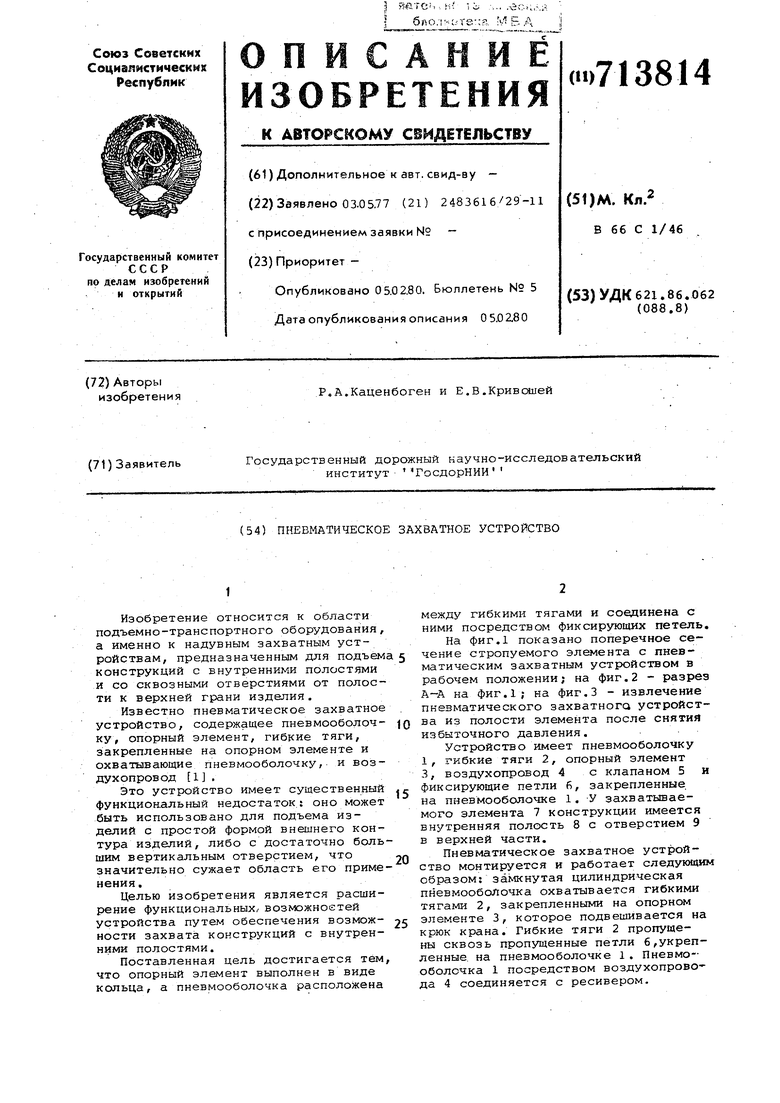
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневматическое устройство для подъема и перемещения груза | 1980 |
|
SU981197A1 |
| Захватное устройство для изделий с конусной вертикальной полостью | 1990 |
|
SU1740303A1 |
| Захватное устройство для грузовС цЕНТРАльНыМ ОТВЕРСТиЕМ | 1978 |
|
SU810598A1 |
| Захватное устройство для строительных изделий с внутренними полостями | 1980 |
|
SU872432A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1967 |
|
SU191761A1 |
| Захват-кантователь для грузов с внутренним отверстием | 1980 |
|
SU918245A1 |
| Грузозахватное устройство | 1990 |
|
SU1773255A3 |
| Устройство для кантования изделий | 1988 |
|
SU1675186A1 |
| РОБОТИЗИРОВАННЫЙ МАНИПУЛЯТОР | 2003 |
|
RU2243881C2 |
| Захватное устройство для изделий с петлями | 1981 |
|
SU1096189A1 |
Изобретение относится к области подъемно-транспортного оборудования, а именно к надувным захватным устройствам, предназначенным для подъем конструкций с внутренними полостями и со сквозными отверстиями от полости к верхней грани изделия.
Известно пневматическое захватное устройство, содержащее пневмооболочну, опорный элемент, гибкие тяги, закрепленные на опорном элементе и охватывающие пневмооболочку, и воздухопровод 1 ,
Это устройство имеет существенный функциональный недостаток: оно может быть использовано для подъема изделий с простой формой внешнего контура изделий, либо с достаточно большим вертикальным отверстием, что значительно сужает область его применения,
Целью изобретения является расширение функциональных/ возможностей устройства путем обеспечения возможности захвата конструкций с внутренними полостями.
Поставленная цель достигается тем что опорный элемент выполнен в виде кольца, а пневмооболочка расположена
между гибкими тягами и соединена с ними посредством фиксирующих петель
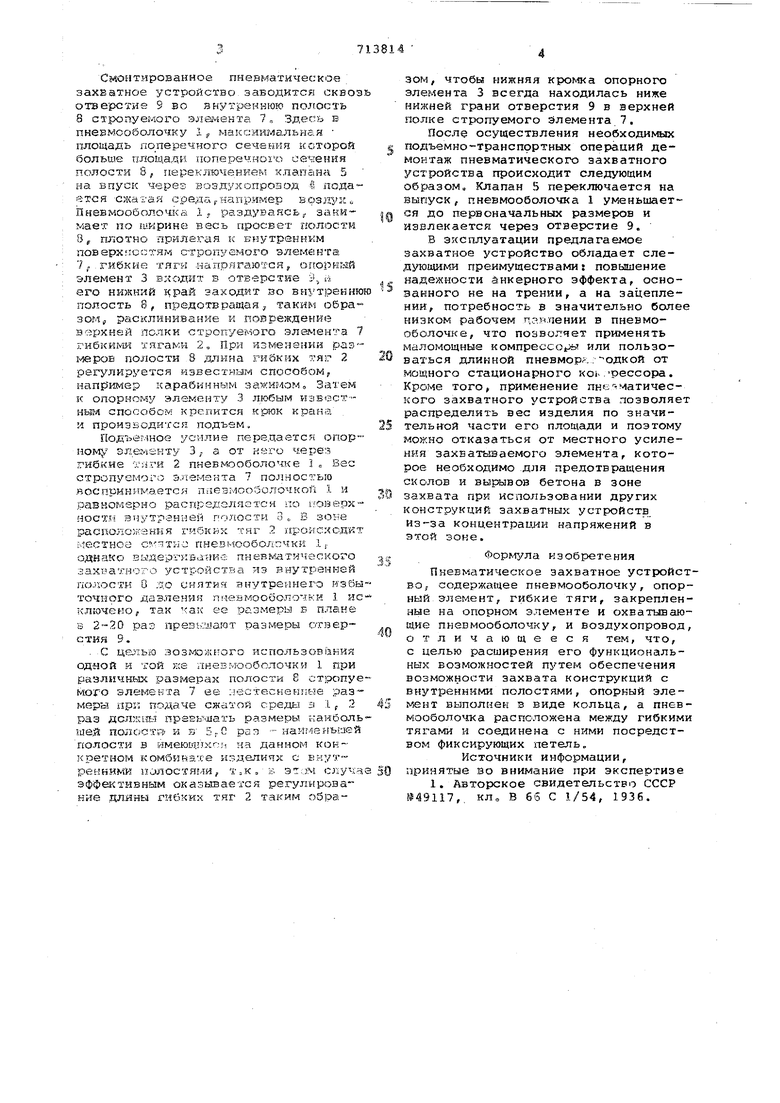
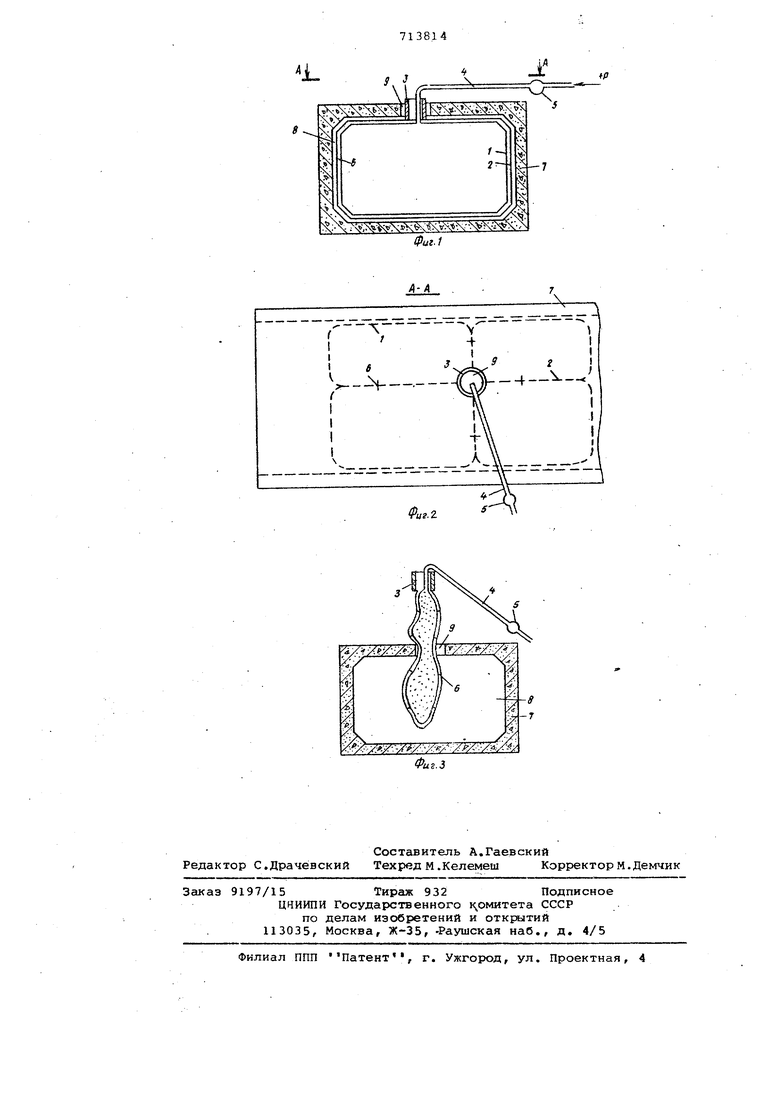
На фиг.1 показано поперечное сечение стропуемого элемента с пневматическим захватным устройством в рабочем положении; на фиг,2 - разрез А-А на фиг,1; на фиг,3 - извлечение пневматического захватного устройства из полости элемента после снятия избыточного давления.
Устройство имеет пневмооболочку if гибкие тяги 2, опорный элемент 3, воздухопровод 4 с клапаном 5 и фиксирующие петли (S, закрепленные. на пневмооболочке 1, У захватываемого элемента 7 конструкции имеется внутренняя полость 8 с отверстием 9 в верхней части.
Пневматическое захватное устройство монтируется и работает следующи образом: заКоснутая цилиндрическая пневмооболочка охватывается гибкими тягами 2, закрепленными на опорном элементе 3, которое подвешивается на крюк крана. Гибкие тяги 2 пропущены сквозь пропущенные петли 6,укрепленные на пневмооболочке 1 , Пневмо-оболочка 1 посредством воздухопровода 4 соединяется с ресивером.
Смонтированное пневматичесжое захватное устройство заводится сквозь отверстие 9 во внутреннюю полость 8 ст{хзпуемого элемента 7, Здесь EI пкевмооболочку i« максиимальнг.я площадь по перечного сечения к&торой больше пло1тдадк поперечнохо сечения полости 8, переключенкем K.nansiHa 5
на впуск через воэдухопрозод
пода
ется Сжагая среда рнапример воздукв Пневмооболоша 1, раздуваясь, заки.мает по ширине весь просвет полости Bf плотно прилегая к инутреннкм поверхпсстям с-гропуемого элемента 7. гибкие тяги .напрягаются, опорнтлй элемент 3 вкодит в отверстие ii, а его нижний край заходит во внз/трекнго полость Bf предотвращаяJ таким образом, расклинивание и по зреждение верхней пслки стропуемого элемента 7 гибкими тягами 2, При изменении раз1«гров полости 8 длина гибких тяг 2 регулируется известным способом, например карабннным зажимом. Затем к опорному элементу 3 любым известныгл способом крепится крюк крана, и производится подъем.
Подъемное усилие передается опорHOMjr злеманту 3, а от него через гибкие als.rH 2 пневмооболоше 1 , Вес стропуемого элемента 7 полностью восприкимается паезмооЗо ючкоЯ 1 и ;рав ном ер но ра с пр еде л я а тс я i :о i -ов ерх ности внутренней полости 3„ В зеке расположання гибквх тяг 2 прой;с: сдкт местноа с.ятио пневмооболсчкк 1 j. однако зыде1ЭгкЕа-нис пневматичаского захтзатного устройства из внутренней nojJocTPs О до оиятия анутренне1-о избыточного давления лневмоо6олочг1:и 1 исключено, так ее размеры в плсше Б раз яревкаагат размеры сэтнерстия 9.
, С целью зозможного использования одной и той же ;1кезмооболочки 1 при разл1 чкых размерах полости 8 CTiaonyeмого элемента 7 ее лестескекпые размера npsi подаче сжатой среды в 1, 2 раз дслйагьз првЕК.иать размеры 1-:анбольшей полостэ Pi В раз -- нaмrle iЬiaeй полости в :HMeJom.Jxr;;i на данном конкретном комбинате изделиях с внутренними полостями, т к, в эт/.М слуга эффективным оказьшается регулирование длины гибких тяг 2 таким образом, чтобы нижняя кромка опорногчэ элемента 3 всегда находилась ниже нижней грани отверстия 9 в верхней полке стропуемого Злемента 7.
После осуществления необходимых подъемно-транспортньах операций демонтаж пневматического захватного устройства происходит следующим образом. Клапан 5 переключается на выпуск, пневмооболочка 1 уменьшается до первоначальных размеров и извлекается через отверстие 9.
В эксплуатации предлагаемое захватное устройство обладает следующими преимуществами; повышение надежности анкерного эффекта, оснозанного не на трении, а на зацеплении, потребность в значительно боле низком рабочем п ллении в пневмооболочке, что позволчет применять маломощные компрессоры или пользоваться длинной пневмор,-. ; одкой от моашого стационарного ко .рессора. Кроме того, применение пне матического захватного устройства позволяе распределить sec изделия по значительной части его площади и поэтому можно отказаться от местного усиления захватываемого элемента, которое необходимо для предотвращения сколов и бетона в зоне захвата при использовании других конструкций захватных устройств из-за концентрации напряжений в этой зоне.
Формула изобретения Пневматическое захватное устройсво,- содержащее пневмооболочку, опорный ajset-ieHT, гибкие тяги, закрепленные на опорном элементе и охватывающие пневмооболочку, и воздухопровод отличающееся тем, что, с целью расширения его функциональных возможностей путем обеспечения возможности захвата конструкций с внутренними полостями, опорный элемент выполнен в виде кольца, а пневмооболочка расположена между гибким тягами и соединена с ними посредством фиксирующих петель.
Источники информации, принятые во внимание при экспертизе
jL
Л
j:
tp
,
A-K
Фиг.г
