Изобретение относится к .грузоподъемным механизр/1ам и предназначено для установки объектов.специального назначения.
Известно устройство, содержащее стойки, на которых смонтированы механизмы вертикального перемещения, включавдие штанги и винтовую пару, механизг/ш горизонтального перемещения и опоры . 1J.
Одна.ко известное устройство может выставлять поднимаемый объект с точностью, не превышающей погрешности установки объекта в устройстве, так как в дальнейшем приводы вертикального и горизонтального направлений могут перемещать объект только плоскопарешлельно.
Целью изобретения является повышение точности установки поднимаемого объекта.
Для достижения этой цели механизмы вертикального перемещения объекта снабжены установленными на оси на стойке двуплечими рычагами, коромыслами, одно из.которых прикреплено к штанге соответствующего механизма вертикального перемещения жестко, а другое - шарнирно, причем одно из плеч ка)эдого короглысла взаимосвязано с
соответствующей опорой, а другое с механизмом горизонтального перемещения, причем устройство снабжено дополнительными oпopa п, кинематически связанншли с механизмами горизонтЕшьного перемещения, установленными с возможностью поворота-относительно ВОрТИКсШЬНОЙ оси и ВЫПОЛ-,
ненными с пазами для установки опор10ного элемента поднимаемого объекта, а опоры, взаимосвязанные с, корсг&слами, установлены с возможностью поворота относительно горизонтальной оси, кроме того, винты механизмов
15 вертикального перемещения и штанги вьтолнены с пазами, в которых установлены концы двуплечих рычагов.
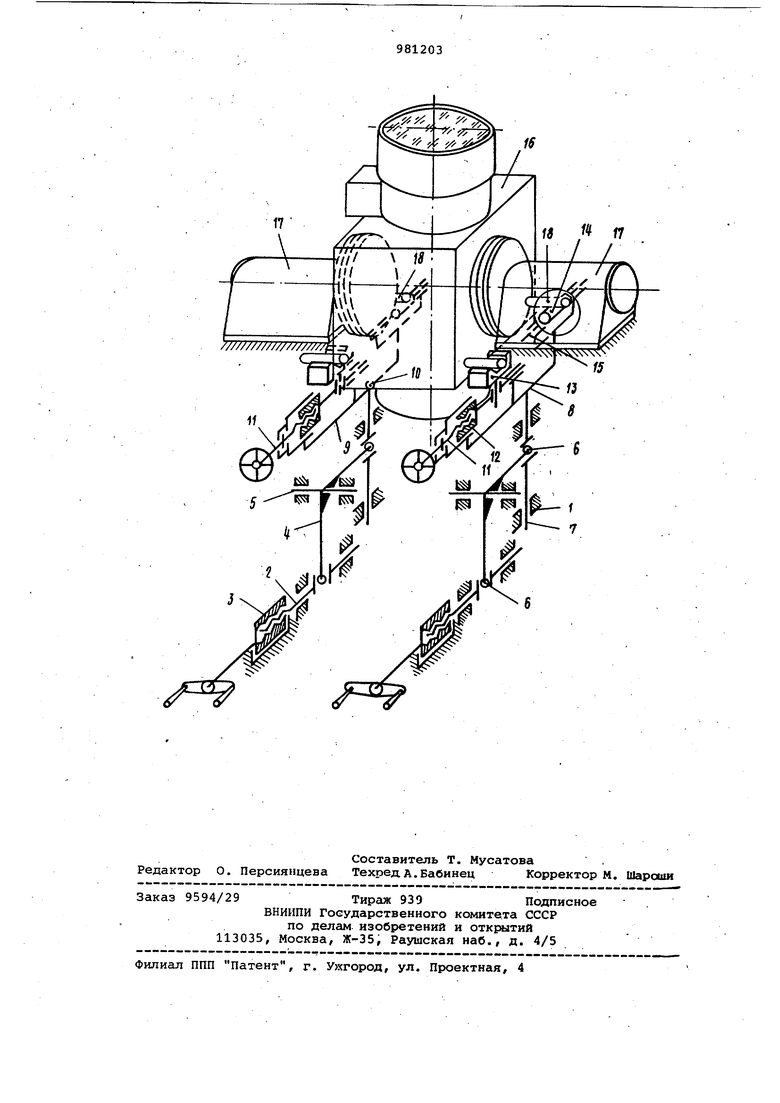
На чертеже изображена кинемати-. ческая схема предлагаемого устройст20ва в аксонометрической проекции.
Устройство состоит из двух несущих стоек 1, в корпусах KOTOEtix смонтированы механизмы вертикального перемещения, содержащие винт
25 2, гайку 3, двуплечий рычаг 4, установленный на оси 5, с роликами б, закрепленными на концах плеч рычага 4, и штанга 7. Один ролик двуплечего рычага 4 входит в паз винта 2, другой ролик - в паз штанги 7.
30 К верхней части штанги 7 одного мех низма прикреплено коромысло 8, а др гого механизма -,коромысло 9, причег4 коромысло 8 прикреплено к штанге жестко, а коромысло 9 установлен при помощи оси 10. На коромыслах 8 и 9,-на одном из их плеч, размещено два независ1шо действующих механизма горизонтального перемещения, выполненных в виде винтовых пар 11 с перемещающимися гайками 12, на кото рых установлены опоры 13, имеющие возможность ограниченного поворота относительно вертикальной оси. на противоположных плечах коромысел 8 и 9 расположены два опорных элемента 14 с цилиндрическими или плоскими опорньтш поверхностями, установленные на горизонтальной оси вращения 15. Монтируемый прибор 16, ось которого в процесе установки должна . быть совмещена с осью вращения его опор 17, имеет две пары установочных штырей 18. Устройство работает следующим образом. Монтируемый прибор 16 установлен своими штырями 18 в пазы двух опор 13 и на опорные элементы 14. Коромысло 9 установлено на штанге 7 ыарнирно для получения трех точек опоры. При одновременном вращении гаек 3 перемещаются винты 2 и разворачивают двуплечие рычаги 4, кото рые перемещают штанги 7 с установленным на коромыслах 8 и 9 монтируемым прибором 16, осуществляя его грубую установку. Затем поочередным вращением в небольших пределах гаек 3 осущест.вляется точное совмещение оси вращения монтируемого прибора 1 с осью вращения его опор 17 в вертикальной плоскости. При одновременном вращении винто 11 перемещаются гайки 12 с опорами 13, в пазах которых расположена пар установочных штырей 18, вторая пара которых скользит по опорным элемента 14 и осуществляется грубая установка монтируемого прибора 16 в горизон тальной плоскости. Затем поочередным вращением в небольших пределах винтов 11 осущест вляется точное совмещение оси вращения монтируемого прибора 16 с осью вращения его опор 17 в горизонтальной плоскости. Размещение двух установочных штырей в пазах опор, имеющих возможность разворота относительно вертикальной оси, а двух других штырей на поверхностях опорных элементов, обеспечивает возможность самоустановки монтируемого прибора при поочередной работе механизмов вертикального перемещения и поочередной работе механизмов гори- : зонтального перемещения. Преимущества конструктивного выполнения предложенного устройства заключаются в том, что механизмы перемещения монтируемого прибора- в вертикальной и горизонтальной плоскости состоят калодый из двух самостоя тельнызс механизмов, имеющих возможность для одновременной или поочередной работы, что позволяет производить с необходимой точностью совмещение оси вращения монтируемого прибора с осью, вращения его опор в вертикальной,и Горизонтальной плоскостях. Формула изобретения Грузоподъемное устройство, содержащее стойки, на которых смонтированы механизмы вертикального перемещения, включающие штанги и винтовую пару, механизмы горизонтального перемещения и опоры, отличающееся тем, что, с целью повышения точности установки поднимаемого объекта, механизмы вертикального перемещений объекта снабежны установленными на оси на стойке двуплечими, рычагами, коромыслами, одно из которых прикреплено к штанге соответствующего механизм вертикального перемещения жестко,а другое - шарнирно, причем одно из плеч каждого коромысла взаимосвязано с соответствующей опорой, а другое - с механизмом горизонтального перемещения, причем устройство снабжено дополнительными опорами, кинематически связанными с механизмами горизонтального перемещения, установленными с возможностью поворота относительно вертикальной оси и выполнеными с пазами для установки опорного элемента поднимаемого объекта, а опоры, взаимосвязанные с коромыслами, установлены с возможностью поворота относительно горизонтальной оси, кроме того, винты механизмов вертикального перемещения и штанги выполнены с пазами, в которых установлены концы двуплечих рычагов. Источники информа;ции, принятые во внимание при экспертизе 1. Авторское свидетельство СССР а 481535, кл. В 66F 7/14, 1975.
/
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для вырубки заготовок из плоского материала | 1983 |
|
SU1119757A1 |
| Швейный полуавтомат для выполнения коротких строчек | 1976 |
|
SU616351A1 |
| КРАН-МАНИПУЛЯТОР | 2005 |
|
RU2312057C2 |
| Устройство для сборки тонкостенных изделий | 1974 |
|
SU524654A1 |
| Автомат для изготовления проволочных граблин | 1980 |
|
SU925493A1 |
| УСТРОЙСТВО ДЛЯ СПУСКО-ПОДЪЕМНЫХ ОПЕРАЦИЙ В СКВАЖИНАХ | 1992 |
|
RU2021475C1 |
| Установка для микросварки проволочных проводников | 2021 |
|
RU2759103C1 |
| Установка для резки плодов на дольки и вырезки сердцевины | 1989 |
|
SU1722403A1 |
| Автоматическое грузозахватное устройство | 1977 |
|
SU686973A1 |
| Устройство для микросварки | 1977 |
|
SU732103A1 |