(54) ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД

| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1990 |
|
RU2015521C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД СИСТЕМ УПРАВЛЕНИЯ РАКЕТ И УСТАНОВОК ВООРУЖЕНИЯ | 2005 |
|
RU2295699C1 |
| Силовой следящий привод | 1987 |
|
SU1425598A1 |
| Электрогидравлический следящий привод | 1984 |
|
SU1245768A1 |
| Электрогидравлическая следящая система | 1987 |
|
SU1476207A1 |
| Электрогидравлическая следящая система | 1979 |
|
SU875334A1 |
| Многоканальный гидропривод | 1987 |
|
SU1439294A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД НЕПОСРЕДСТВЕННОГО УПРАВЛЕНИЯ С АДАПТИВНЫМИ СВОЙСТВАМИ | 2008 |
|
RU2368932C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1999 |
|
RU2161579C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ РЕЛЕЙНАЯ СЛЕДЯЩАЯ | 1973 |
|
SU370376A1 |
Изобретение относится к гидроавтоматике и может быть использовано в гидросистемах, работа которых характеризуется многократными перебросками нагрузки из одного положения в другое.
Известен электрогидравлический следящий привод, содержащий последовательно соединенные первый элемент сравнения, электронный усилитель и электрогидравлический усилитель с распределительным золотником, соединенным с баком, гидродвигателем, датчик положения которого подключен к отрицательному входу первого элемента сравнения, и источником рабочей жидкости постоянного давления, включающим гидроаккумулятор и насос переменной производительности, соединенный с распределительным золотником и гидроаккумулятором 1.
Недостатком известного гидропривода является низкий КПД вследствие осуществления всех перебросок нагрузки только в следящем режиме работы распределительного золотника.
Цель изобретения - повышение КПД.
Указанная цель достигается тем, что привод снабжен управляемым блоком запоминания, пороговым элементом и
последовательно соединенными вторым элементом сравнения, релейным элементом и ключом, а электронный усилитель выполнен суммирующим, при этом выход первого элемента сравнения подключен ко входам блока запоминания, порогового элемента и второго элемента сравнения, выход порогового элемента соединен с управляющими входами клю10ча и блока запоминания, а выходы последних - с входом электронного усилителя и отрицательным входом второго элемента сравнения соответственно.
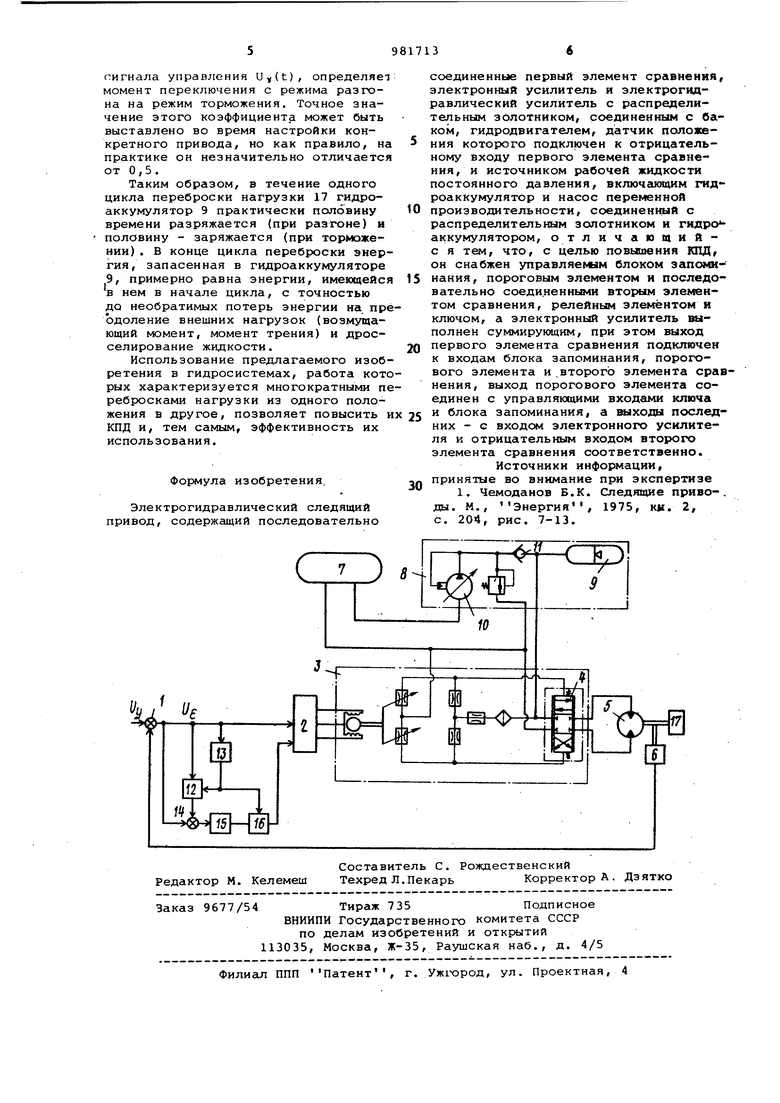
На чертеже изображена схема элек15трогидравлического следящего привода.
Привод содержит последовательно соединенные первый элемент 1 сравнения , суммирующий электронный усилитель 2 и электрогидравлический уси20литель 3 с распределительным золотником 4, соединенным с гидродвигателем 5, датчик 6 положения которого подключен к отрицательному входу элемента 1 сравнения, баком 7 и источни25ком 8 рабочей жидкости постоянного давления, включающим гидроаккумулятор 9 и насос 10 переменной производительности, соединенный через обратный клапан 11 с золотником 4 и
30 гидроаккумулятором 9. Кроме того. привод содержит упрарляемый блок 12 запоминания, пороговый элемент 13 и последовательно соединенные второй элемент 14 сравнения, релейный элемент 15 и ключ 16, при этом выход элемента 1 сравнения подключен ко рходам блока 12 запоминания, порого вого элемента 13 и элемента 14 срав нения, выход порогового элемента 13/ соединен с управляющими входами клю ча 16 и блока 12 запоминания, а выходы последних - с входом электронного усилителя 2 и отрицательным вх дом элемента 14 сравнения соответст венно. Гидродвигатель 5 связан с на руэкой 17. Привод работает следующим образо При малых сигналах управления Us (t) , соответствующих следящему ре jxHMy или отработке небольших рассог ласований, сигнал управления поступает на вход элемента 1 сравнения, усиливается, проходя через электронный усилитель 2, электрогидравличес кий усилитель 3, и вызывает перемещение распределительного золотника При этом жидкость от источника 8 поступает в гидродвигатель 5, который перемещает нагрузку 17. Перемещение нагрузки 17 измеряется датчиком 6 положения и сигнал с его выхода поступает на элемент 1 сравнения, где он вычитается из сигнала управления U)(t) , образуя сигнал ошибки Ug(t) , По мере отработки рассогласования распределительный золотник 4 возвращается в нейтральное положение. При ступенчатом сигнале управления, соответствующем переброске нагрузки 17 в новое положение, когда значение сигнала ошибки Ug(t) превышает определенный уровень (величина этого уровня определяется настройкой порогового элемента 13 и составляет 2-10% от максимально возможного зна.чения сигнала ошибки, соответствующего преброске нагрузки из одного крайнего положения в другое), сигнал с выхода порогового 13 замыкает ключ 16 и одновременно включает блок 12 запоминания, который запоминает с определенным коэффициентом значение сигнала ошибки Ug(0) имеющего место в момент подачи ступенчатого сигнала управления-Uy(t). Текущее значение сигнала ошибки срав нивается с запомненным значением на элементе 14 сравнения и результирующий сигнал поступает на вход релейного элемента 15. Выходной сигнал релейного элемента 15 выбирается таким образом, чтобы он гарантированно превышал сигнал ошибки Ug(t), поступающий на вход электронного усилителя 2 с выхода элемента 1 сравнения, в любом режиме работы привода. При этом распределительный золотник 4 перебрасывается в крайнее положе.ние, максимально открывая дросселирующее окно, с тем, чтобы свэсти до минимума потери на нем. Гидродвигатель 5, разгоняя нагрузку 17, преобразует энергию источника 8 рабочей жидкости и энергию, запасенную в гидроаккумуляторе 9, в кинетическую энергию нагрузки 17. По мере отработки управляющего ступенчатого воздействия сигнал ошибки Ug(t) уменьшается я как только его значение стает меньpie значения выходного сигнала блока 12 запоминания, выходной сигнал релейного элемента 1Ь меняет свою полярность. Распределительный золотник 4 перебрасывается в противоположное крайнее положение, гидродвигатель 5 тормозится, засасывая жидкость из бака 7 и направляя жидкость в гидроаккумулятор 9. Обратный клапан 11 отделяет при этом гидроаккумулятор насоса 10 и последний работает практически на холостом ходу, поддерживая постоянное давление при расходе, необходимом для восполнения собственных утечек. Для предотвращения явления кавитации в гидродвигателе 5 бак 7 может быть выполнен с наддувом. Наддув исключает также подсос воздуха в привод во время эксплуатации. Кинетическая энергия -нагрузки 17 преобразуется в потенциальную энергию жидкости в гидроаккумуляторе 9. Как только текущее значение сигнала ошибки Ug(t), уменьшаясь, достигает величины порога срабатывания порогового элемента 13, то ключ 16 отключает выходной сигнал релейного элемента 15 от входа электронного усилителя 2, а блок 12 запоминания обнуляется, тем самьм подготовясь к следующему циклу работы. Внутри зоны срабатывания порогового элемента 13 привод, работая в следующем режиме, описанном вьаие, производит точную установку нагрузки 17 в положение, соответствующее сигналу управления Uy(t). В случае отсутствия внешних возмущений и сил трения, для того, чтобы нагрузка 17 заняла положение, соответствующее сигналу управления Uj(t), необходимо произвести переключение с режима разгона на режим торможения при значении сяиибки, равном половине максимального значения сшибки, имеющей место в момент подачи ступенчатого сигнала управления и N)(t) , так как ускорения торможения и разгона одинаковы. Из-за наличия сил трения в гидродвигателе 5 и нагрузке 17 ускорения разгона и торможения нагрузки несколько отличаются, так как в первом случае сила трения препятствует разгону и способствует торможению во втором. Значение коэффициента, с которым блок 12 запоминания запоминает максимальное значение ошибки ) ,в момент подачи
