(54) АВТОМАТИЧЕСКАЯ ЛИНИЯ ДЛЯ МЕХАНИЧЕСКИХ ИСПЫТАНИЙ ИЗОЛЯТОРОВ
1
Изобретение относится к электроизоляционной технике, а более конкретно к устройствам для проведения механических испытаний изоляторов.
Известна автоматическая линия для механических испытаний с непрерывным автоматическим циклом работы, содержащая захваты, расположенные на планшайбах ротора один против другого, и механизм негру жения с гидроприводом t ll
Недостатком такой машины является то, что конструкция не позволяет автоматически поддерживать нагрузку в заданных пределах, а использование в механизме нагруЖения гидравлики затрудняет эксплуатацию.
Наиболее близка к предлагаемой автоматическая линия для механических испытаний, содержащая станину с силовыми копирами, кинематически связанный с приводом многопозиционный ротор, несущий активные и пассивные захваты, опорные стопы, подпружиненные вдоль оси захваты, рычажный механизм нагружения
взаимодействующий с силовыми копирами и с активным захватом, и механизм выгрузки 2}.
Недостатком этой линии является низкая производительность и ограниченные технологические возможности при испытании изоляторов различного типа.
Целью ,изобрететия является повыще- ние производительности и расщирение
jg функциональных возможностей.
Указанная цель достигается тем, что автоматическая линия снабжена закрепленными на станине в зоне механизма выгрузки двумя дополнительными копи15 рами, роликовыми толкателями, закрепленными на нижней плаыщайбе в каждой позиции, и реечной передачей, расположенной в пассивном захвате механизма нагружения, первый из дополнительных
20 копиров установлен перпендикулярно к оси захвата и кинематически связан с рейкой пассивного захвата, а второй выполнен в виде контркопира, расположен по оси захвата и кинематически связан
со штангой активного захвата, ролик механизма нагружения выполнен перекидным а механизм выгрузки выполнен в виде устаноЕленногр на оси повротного рычага и телескопически связанного с ним Т-образного захвата, который через шарнирную тягу и зубчато-рычажный механизм кинематически связан с роликовым толкателем.
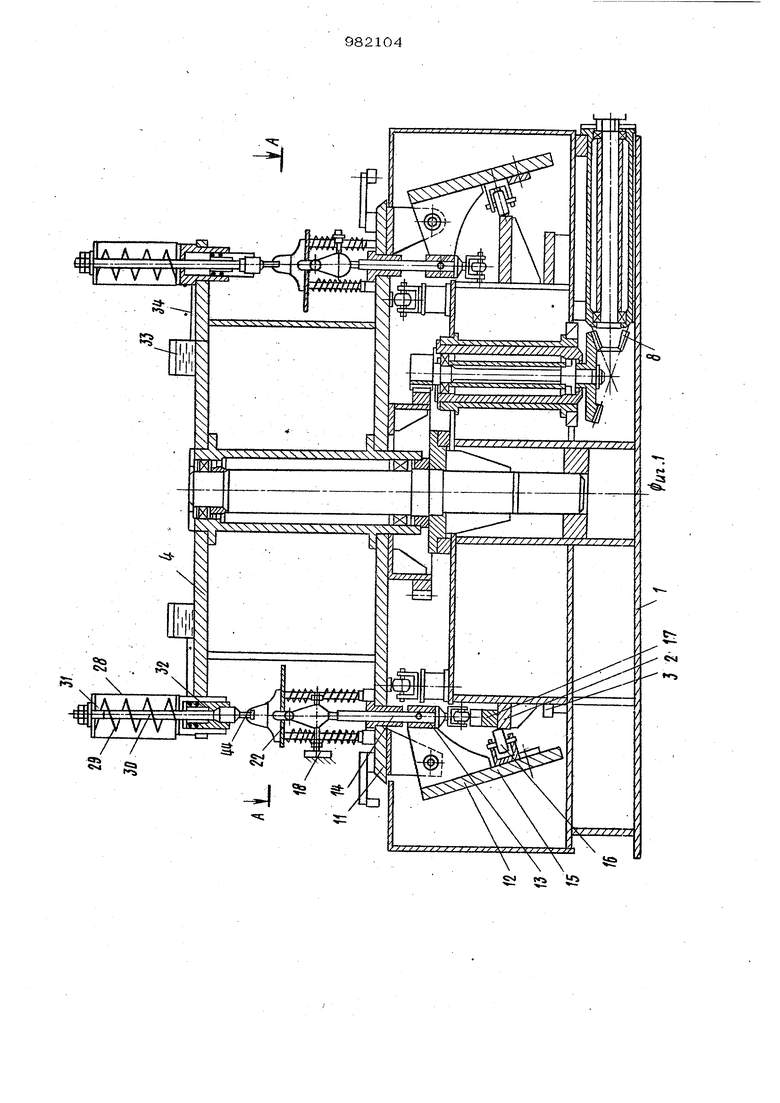
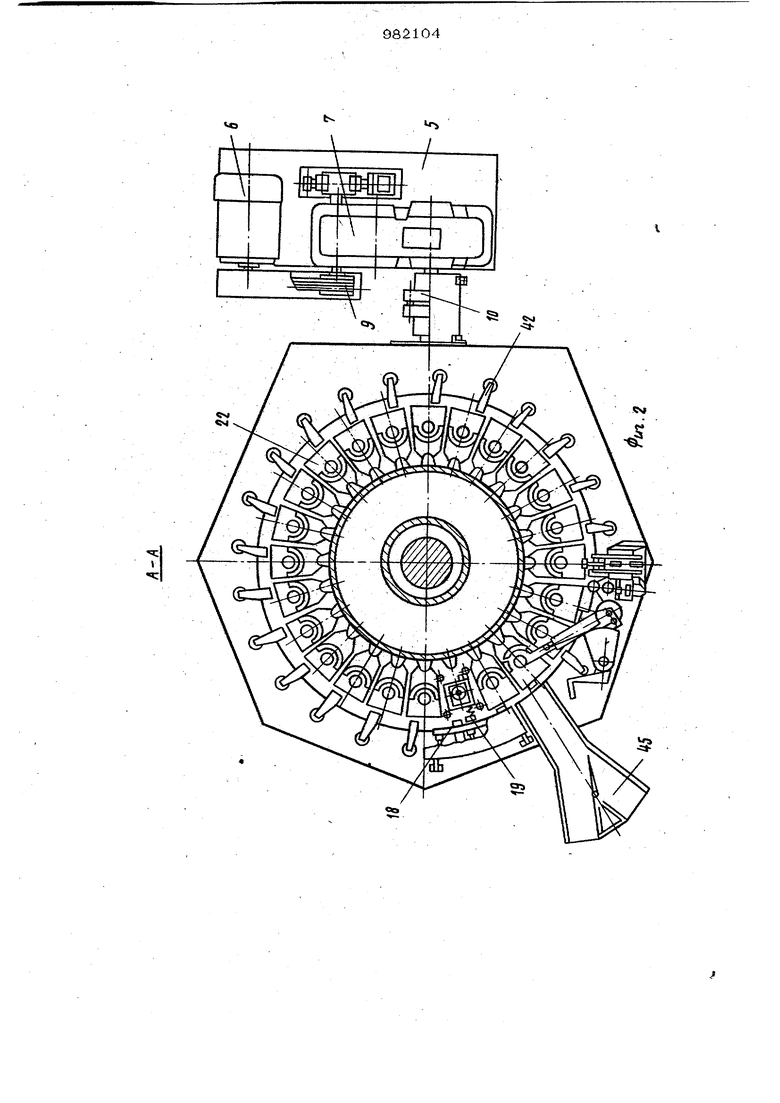
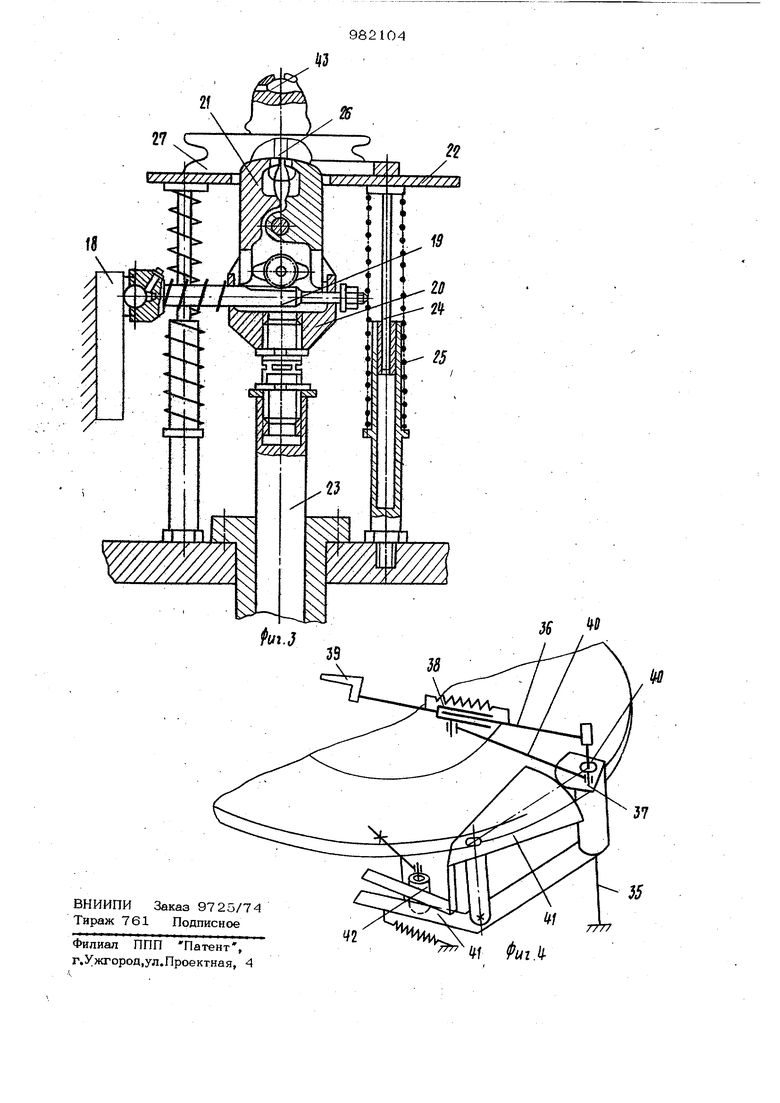
На фиг. 1 изображена кинематическая схема роторной линии для механических испытаний изоляторов; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - узел пассивного захвата; на фиг. 4 - кинематическая схема механизма выгрузки.
Роторная линия для механических испытаний изоляторов состоит из станины I 1 с закрепленными на ней силовыми копирами 2 и 3, ротора 4 и кинематически связанных с приводом 5, включающим. двухскоростной электродвигатель 6, редукторов 7 и 8, связанных муфтой 9.
Ротор 4 имеет жестко связанные между собой верхнюю планшайбу 1О и нижнюю планшайбу 11; на которЬЙ установлен механизм нагружения, выполненный в.виде двуплечего рычага 12, одно плечо 13 которого шарнирно связано со штангой активного захвата 14, а на другом плече 15 установлен сферический перекидной ролик 16, контактирующий с рабочей поверхностью силового копира .2 или 3.
Каждый силовой копир 2, 3 спрофилирован так, что имеются зоны выбора зазора, подъема, выдержки и снятия нагрузки.
На станине 1 закреплены дополнительные копиры 17 и 18. Дополнительный копир 17 Выполнен в виде контркопира по отношению к силовым копирам 2 и 3 и кинематически связан со штангой активного захвата 14 с воздействием по оси захвата. Дополнительный копир 18 установлен с возможностью перпендикулярного к оси захвата воздействия и кинематически связан с рейкой 19 механизма пассивного захвата 20, который выполнен в виде щарннрно соединенных губок 21
Не Нижней планшайбе 11 в каждой Позипии установлены с возможностью осевого перемещения опорные столы 22, которые подпружинены вдоль оси захвата 23, а их направпякяаие 24 расположены в телескопических втулках 25, закрепленных на планшайбе 11.
Механизм пассивного захвата 2О преназначен для зажима стержня 26, заармиpoBatffloro в испытываемый изолятор 27,
На верхней планшайбе 10 соответственно оси захвата 23 в каждой позиции установлен механизм ограничения нагрузки, выполненный в виде тарированного
пакета 28, содержащего тарельчатые пружины 29, собранные на скалке ЗО вместе с буфером 31, и гидравлическую систему гашения удара, .включающую систему плунжеров 32, бак для масла 33 и.
трубопроводы 34.
Далее, в зоне загрузки-выгрузки роторной линии установлен механизм выгрузки, вьтолненный в виде закрепленной на станине 1 вертикальной оси 35
и установленного на ней с возможностью поворота в плоскости, параллельной плоскости нижней планшайб. 11, рычага 36 и зубчатого сектора 37. ПоворО7-ный рычаг 37 через телескопическую опору
скольжения 38 связан с Г-образным рычагом 39, который одновременно через шарнирную тягу 4О связан с зубчатым сектором 37 рычажно-зубчатой передачи
41,На нижней планшайбе lie каждой позиции установлен роликовый толкатель
42,взаимодействующий с рычажно-зубчатой передачей 41.
В механизме ограничения нагрузки консольно выступающая часть 30 выполнена со сферическим наконечником
43,контактирующим в рабочем положении с шапкой 44 испытываемого изолятора 27. Загрузка и выгрузка испытываемых изоляторов 27 производится в лоток 45.
Роторная линия для механических испытаний изоляторов работает следующим образом.
При непрерывно вращающемся роторе 4 на подпружиненный опорный стол 22 устанавливается испытываемый изолятор 27. Изолятор 27 в верхней части имеет в шапке паз, .куда входит сферический стержень механизма ограничения нагрузки, а внизу в изоляторе 27 находится заармированный стержень 26. При врашении ротора 4 от контркопира 17 поднимается вверх пассивный захват 2О в раскрытом положении, захватывает губками 21 стержень и выбирает зазоры в верхнем и нижнем сое/цинениях изолятора. Далее ролик 16 механизма нагружения, обкатываясь по силовому копиру 2, отклоняет двухплечевой рычаг 12, заставляя штангу активного захвата 14 перемешать-. ся вниз, сжимая тарельчатые пружины 29 механизма ограничения нагрузки. Вь1брав ход на подъеме силового копира 2, что соответствует максимальному сжатию 50 тарельчатых пружин 2S на тарированное усилие, ролик 16 начинает обкатываться по постоянному радиусу силового ксэтира 2, что обеспечивает постоянство нагрузки ,на изделие в течении заданного времени. В конце выдержки.установлен известный механизм контроля взятия нагруз ки. При срабатывании механизма контроля нагрузки он дает команды на известный механизм мар1сировки изолятора (год ный и брак) и на запоминание годной и негодной позиции самой машины. Это обеспечивает выгрузку годных и негодных изделий .в разные лотки в воне выгрузки. После проведений соответствующего вращения ротора 4 происходит снятае нагрузки. Изделие попадает в зону ИзПрузки-загрузки. В зоне выгрузки шта га активного захвата 14 поднимается от контркопира 17, при этом одновременно поднимается опорный стол 22 с изолятором 27 механизма захвата 2О, освобождая изолятор 27, и механизм пассивного захвата 20 резко перемещается вниз под опорный стоп 2 2. При этом механизм выгрузки снимает изолятор 27 с опорисйго стола22 в лоток 45, а на освободившееся местр устанавливается следующий изолятор 27. j Предлагаемая автоматическая линия повышает производительность процесса механического испытания изоляторов за счет увеличения количества рабочих позиций и режимов нагружения, а вьшолне иие механизма выгрузки в виде автомати чески действующего рычажного механизма позволяет повысить надежность-работы линии.. Введение в механизм нагружения перекидного ролика, возможность регулировки положения щтанги активного захвата и нагрузки позволяет проводить испытания изоляторов различного габарита, что расширяет технологические возможности линии. 4 Формула изобретения Автоматическая линия для механи - : ческих испытаний изоляторов, содержащая станину с силовыми копирами, кинематически связанный с приводом многопозиционный ротор с верхней и нижней планшайбами, установленные в каждой позиции на верхней планшайбе захват с механизмом ограничения нагрузки, а на нижней - опорный стол с механизмами активного и пассивного захвата, рычажный механизм нагружения, кинематически связанный с силовым копиром через ролик, и со штангой активного захвата, и механизм выгрузки, отличающ а я с я тем, что, с целью повышения производительности и расширения функциональных возможностей, она снабжена закрепленными на станине в зоне механ1 ма выгрузки двумя дополнительными копирами, роликовыми толкателями, закрепленными на нижней планшайбе в каждой позиции, и реечной передачей, расположеЦноЙ в пассивном захвате механизма нагружеиия, первый из допоянйтельных копиров установлен перпендикулярно к оси захвата и кинематически связан с рейкой пассивного захвата, а второй выполнен в виде контркопира, расположен по оси захвата и кинематически связан со штангой активного захвата, ролик механизма нагружения выполнен перекидным, а механизм выгрузки выполнен в виде установленного на оси поворотного рычага и телескопически связанного с ним Г-образного захвата который через шарнирную тягу и зубчато-ры,чажный механизм кинематически связан с роликовым толкателем. Источники информации, принятые во внимание при экспертизе 1.Испытательные машины. Сводный каталог. Армавирский завод испытательных машин. М., 1966, с. 90, 91. 2.Авторское свидетельство СССР № 734533, кл. GO1N 3/О8, 1978. ,
ч;
I I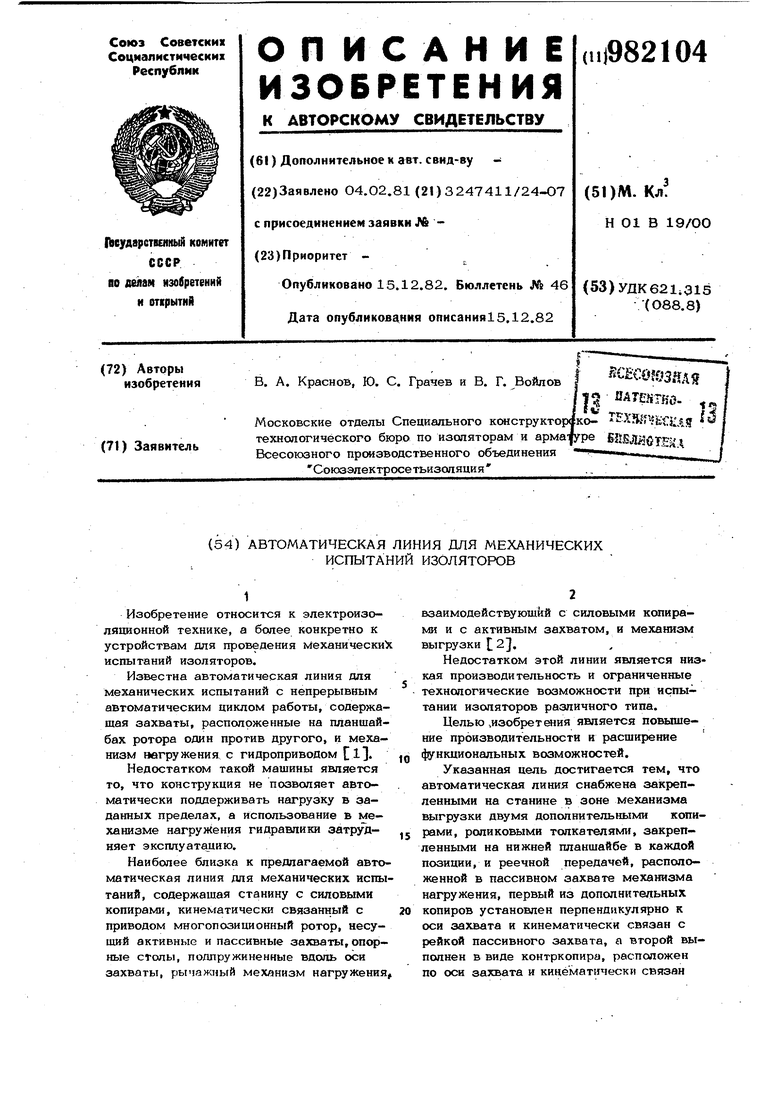
| название | год | авторы | номер документа |
|---|---|---|---|
| МАШИНА ДЛЯ ИСПЫТАНИЯ НА ПРОЧНОСТЬ КРУГЛОЗВЕННЬ!Х ЦЕПЕЙ | 1968 |
|
SU209821A1 |
| Автоматическая линия спутникового типа | 1991 |
|
SU1784445A1 |
| Машина для испытаний на усталость при двухчастотном осевом нагружении | 1985 |
|
SU1252702A1 |
| Станок для сборки узлов | 1977 |
|
SU677801A1 |
| Разрывная машина для испытания материалов | 1981 |
|
SU954848A1 |
| Роторный автомат для лужения цилиндрических деталей | 1978 |
|
SU774841A1 |
| РОТОРНО-КОНВЕЙЕРНАЯ ЛИНИЯ | 1992 |
|
RU2036771C1 |
| Автооператор | 1978 |
|
SU749629A1 |
| Кривошипно-чеканочный пресс | 1977 |
|
SU742162A1 |
| Устройство для загрузки деталей | 1991 |
|
SU1802779A3 |