(54) АВТООПЕРАТОР
1
Изобретение относится к области машиностроения и может быть использовано во всех отраслях промышленности для подъема и перемещения деталей, подаваемых к технологическому оборудованию.
Известен айгооператор, содержащий станину с укрепленным на ней копиром, головку с рычажными захватами, их привод в виде силового цилиндра и механизм передачи движений от силового цилиндра к рь-.. чажным захватам 1}.
Однако невозможность переналадки в процессе эксплуатация попожо1ия захватов относительно вертикальной оси сужа технологические возможности автооператора, j
Целью изобретения является расширение технологических возможностей автооператора.
Это достигается тем, что он снабжен шарнирно связанными с головкой штангами, JQ рычажные захваты установлены с возмож-. ностью осевого перемещения на штангах, в головке вьшолнены вертикальные пазы, а механизм передачи движения содержит j
устансвлешшй с возможностью перемещения в пазахголовки палец, кинематически связанныйЯ° штангами.
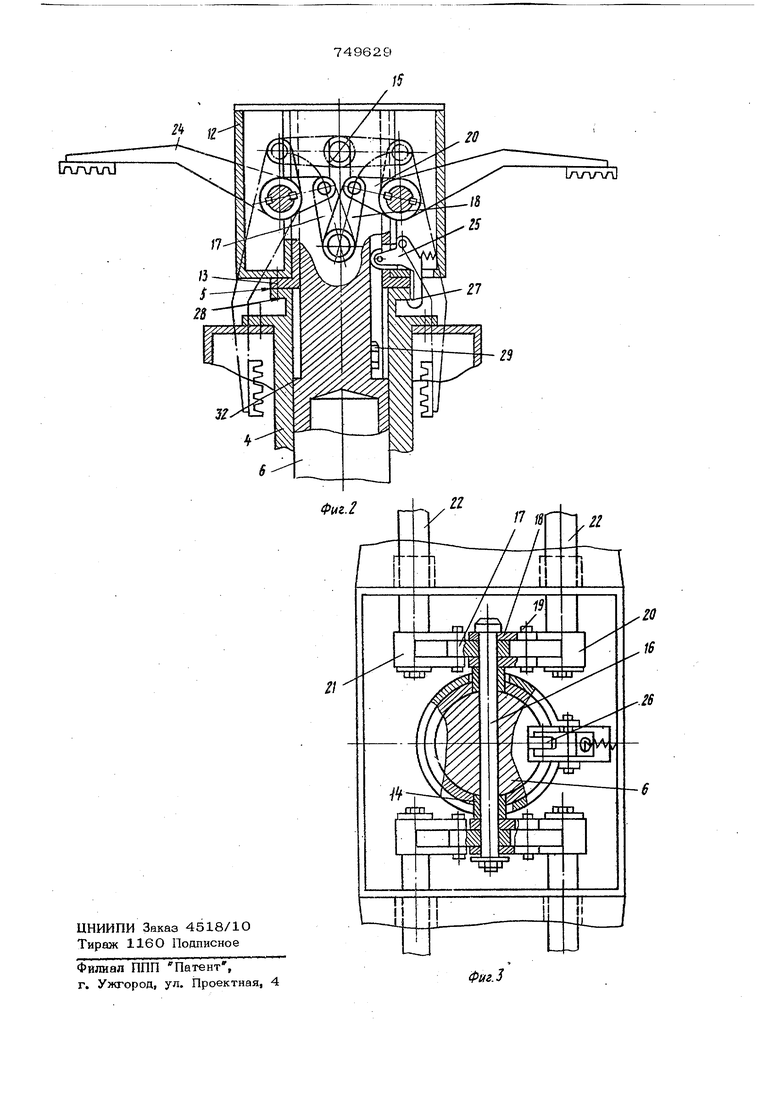
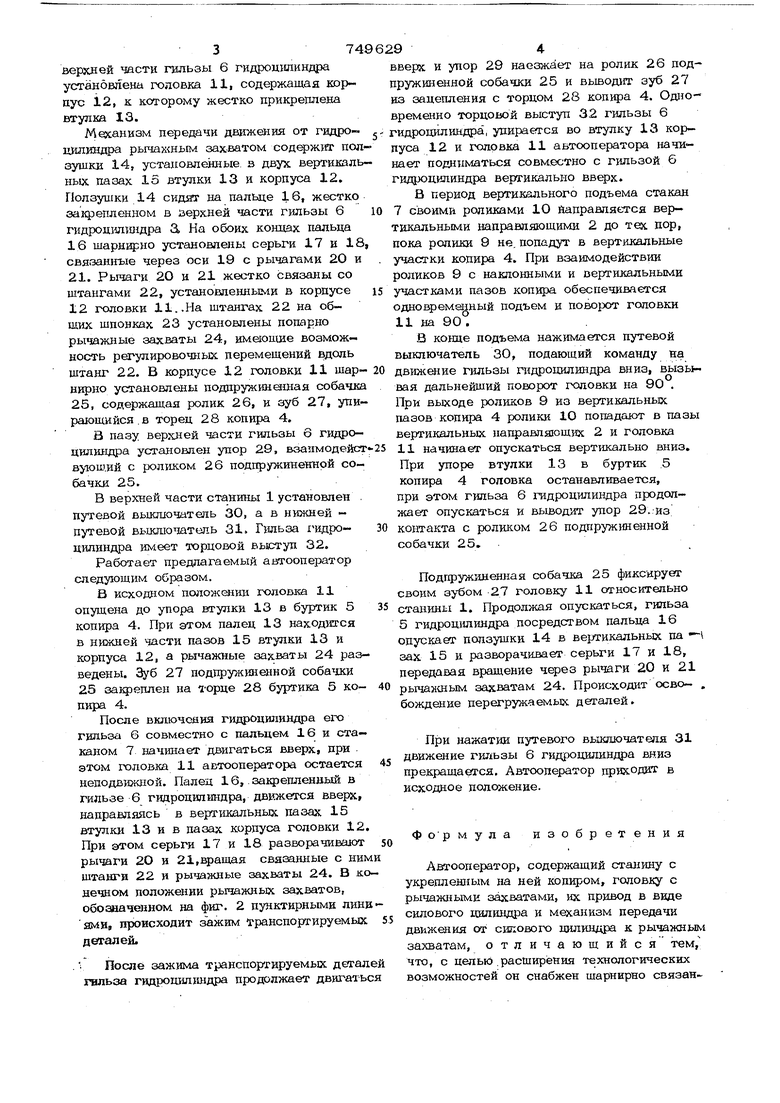
На фиг. 1 изображен автооператор, общий вИд} на фиг. 2 - головка автооп ратора, общий вид на фип 3 - то .
Предлагаемый автооператор состоит из полой сварной станины 1, ейутри которой укреплены вертикальные направляющие 2 и шток гидроцилиндра 3 привода рычажных захватов. На верхней плоскости станины установлен копир 4, имеющий на наружной поверхности Y-образные пазы. На верхней шсти копира 4 выполнен буртик 5. Гильза 6 силового цилиндра, например гидроцилиндра 3, направляется внутренней расточкой в копире 4. К гильзе 6 гидро- цилиндра жестко прикреплен стакан 7, верхняя часть которого содержит две диаметрально расположенные оси 8, на которых шарнирно установлены ролики 9, взаимодействующие сУ -образными пазами копира 4, и ролики 10, взаимодействующие с вертикальными пазами направляющих 2. На верхней части гильзы 6 гидрощшиндра установзгена головка 11, содержащая корпус 12, к которому жестко прикреплена втулка 13. Механизм передачи движения от гидроцилиндра рычах ным захватом содфж1йг иол зушки 14, усталовленные в двух вертикаль ных пазах 15 втулки 13 и корпуса 12. Ползушки 14 сидят на пальце 16, жестко закрепленном в верхней части гильаы 6 гидроцилшадра 3, На обоих концах пальца 16 шарн1фно установлены серьги 17 и 18 связанные через оси 19 с рычагами 20 и 21. Рычаги 2О и 21 жестко связаны со штангами 22, установленными в корпусе 12 головки 11..На штангах 22 ка общих шпонках 23 устаповдены попарно рычажные захваты 24, имеюише возможность регулировочных перемеш;еиий вдоль штанг 22. В корпусе 12 головки 11 шарнирно установлены подпружиненная собачка 25, содержащая ролик 26, и зуб 27, упирающийся, в торец 28 копира 4. В пазу верхней части гильзы 6 гидроцилшвдра установлен упор 29, взанмодейст вуюш.ий с роликом 26 подпружиненной собачки 25. В верхней части станины 1 установлен . путевой выключатель ЗО, а в нижней путевой вьшлючатель 31. Гильза гидроцилиндра юлеет торцовой вьютуп 32. Работает предлагаемый автооператор следующим образом. В исходном положении головка 11 опущена до упора втулки 13 в буртик 5 копира 4. При этом палец 13 наход5Егся в нижней части пазов 15 втулки 13 и корпуса 12, а рычажные захваты 24 разведены, б 27 подпружиненной 25 закреплен на 1орце 28 буртика 5 копира 4. После включения гидроцилиндра его гильза 6 совместно с пальцем 16 и стаканом 7 начинает двигаться вверх, при этом головка 11 автооператора остается неподвижной. Палец 16,. закрепленный в гильзе 6 гкдроцилиндра, движется вверх, направляясь в вертикальных пазах 15 втулки 13 и в пазах корпуса головки 12 При этом серьги 17 и 18 разворачивают рычаги 2О и 21,вращая связанные с ним штанги 22 п рычажные захваты 24. В ко нечном положении рычажных захватов, обозначенном на фиг. 2 пунктирными лини ями, происходит зажим транспортируемых деталей. V После зажима транспортируемых детал гильза гидрошш1шдра продолжает двигатьс 74 94 вверх и упор 29 наезжает на ролик 26 подпружиненной собачки 25 и выводит зуб 27 из зацепления с торцом 28 копира 4. Одновременно торцовой выступ 32 гильзы 6 идроцилиндра, упирается во втулку 13 корпуса 12 и головка 11 автооператора начинает подниматься совместно с гильзой 6 гидроцвлиндра вертикально вверх. В период вертикального подъема стакан 7 своими роликами 10 йаправляется вертикальными направляющими 2 до тех пор, пока ролики 9 не. попадут в вертикальные участки копира 4. При взаимодействии роликов 9 с наклонными и вертикальными участками пазов копира обеспечивается одновременный подъем и поворот головки 11 на 90 . В подъема нажимается путевой выключатель 30, подающий команду на двинсение гильзы гадроцилиндра вниз, вая дальнейший поворот головки на 90 , При выходе роликов 9 из вертикальных пазов копира 4 ролики 1О попадают в пазы вертикальных направляющие 2 и головка 11 начинает опускаться вертикально вниз. При упоре втулки 13 в буртик 5 копира 4 головка останавливается, при этом гильза 6 гидроциливдра продолжает опускаться и выводит упор 29. из контакта с роликом 26 подпружиненной собачки 25. Подпружиненная собачка 25 фиксирует своим зубом 27 головку 11 относительно стш1ины 1. Продолжая опускаться, гильза 5 гидроц}шиндра посредством пальца 16 опускает ползушки 14 в вертикальных па - зах 15 и разворачивает серьги 17 и 18, передавая вращение через рычаги 20 и 21 рычаишым захватам 24. Происходит осво- . бождение перегружаемых деталей. При нажатии путевого выключателя 31 движение гигхьзы 6 гидроцилиндра вниз прекращается. Автооператор пряходит в исходное положение. Формула изобретения Автооператор, содержащий станину с укрепленным на ней копиром, головку с рычажными захватами, их привод в ввде силового цилиндра и механизм передачи движения от силового цилиндра к рычажным захватам, отличающийся тем, что, с целью .расширения технологических возможностей он снабжен шарнирно связанBbiMEf с головкой штайгами, рычажные захваты установлены с возможностью осевоfo перемещения на штангах, в головке выполнены вертикальные пазы, а механизм передачи движения содержит установлент|ый с возможностью перемещения в пазах
головки налец, кинематически связанный со штангами.
Источники информации, принятые во внимание ,при экспертизе
1. Авторское свидетельство СССР № 492375, кл. В 23 Q 7/О4, 1975.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автооператор | 1974 |
|
SU492375A1 |
| Автоматическая линия спутникового типа | 1991 |
|
SU1784445A1 |
| Установка для армирования керамических изделий | 1982 |
|
SU1057291A1 |
| Устройство для бракеража ампул, наполненных прозрачной жидкостью | 1977 |
|
SU682799A1 |
| Устройство для прессования изделий | 1983 |
|
SU1138326A1 |
| Устройство для маркировки и укладки дискообразных изделий | 1987 |
|
SU1504167A1 |
| Технологический комплекс для обработки цилиндрических деталей | 1989 |
|
SU1761436A2 |
| Автомат для навивки пружин | 1979 |
|
SU860922A1 |
| Хонинговальный станок для обработки цилиндрических поверхностей | 1986 |
|
SU1563951A2 |
| Сборочная линия | 1985 |
|
SU1255352A1 |