(54) ЗАДНЯЯ БАБКА ТОКАРНОГО СТАНКА

| название | год | авторы | номер документа |
|---|---|---|---|
| Задняя бабка токарного станка | 1980 |
|
SU878417A1 |
| Задняя бабка токарного станка | 1980 |
|
SU921687A1 |
| Задняя бабка токарного станка | 1980 |
|
SU931306A2 |
| Задняя бабка металлорежущего станка | 1983 |
|
SU1114490A1 |
| Задняя бабка токарного станка | 1981 |
|
SU963697A1 |
| Задняя бабка токарного станка | 1980 |
|
SU1016079A1 |
| Устройство для обработки цилиндрических валов | 1981 |
|
SU1007932A1 |
| Задняя бабка токарного станка | 1979 |
|
SU795726A1 |
| Задняя бабка с электроприводом | 1988 |
|
SU1646690A1 |
| ЗАДНЯЯ БАБКА ТОКАРНОГО СТАНКА | 1997 |
|
RU2162770C2 |
Изобретение относится к станкостроению.
Известна задняя бабка токарного станг ка, содержащая установленный в корпусе с возможностью вращения механизм зажима в виде цанги, имеющей привод перемещения от механизма натяжения детали и связанной с валом, несущим фланец с демпфером и обойму 1.
Недостатком известной задней бабки является относительно сложное управление усилием растяжения детали вследствие нелинейности связи между частотой вращения детали и растягивающим усилием.
Целью изобретения является упрощение управления усилием растяжения нутем обеспечения линейной зависимости растягивающего усилия от частоты вращения детали.
Для достижения поставленной цели задняя бабка снабжена закрепленной на корпусе крыщкой, а механизм натяжения выполнен в виде гироскопа с двумя степенями свободы, состоящего из жестко закрепленной на валу втулки с гибкими стержнями и установленных на последних инерционных -ДИСКОВ, контактирующих с поверхHOCTbiK) КрЫЩКИ.
Во фланце выполнена расточка, в которую помещен ступенчатый вал с отверстиями, причем расточка заполнена рабочей средой для создания сил вязкого сопротивления и образует со ступенью вала демпфера.
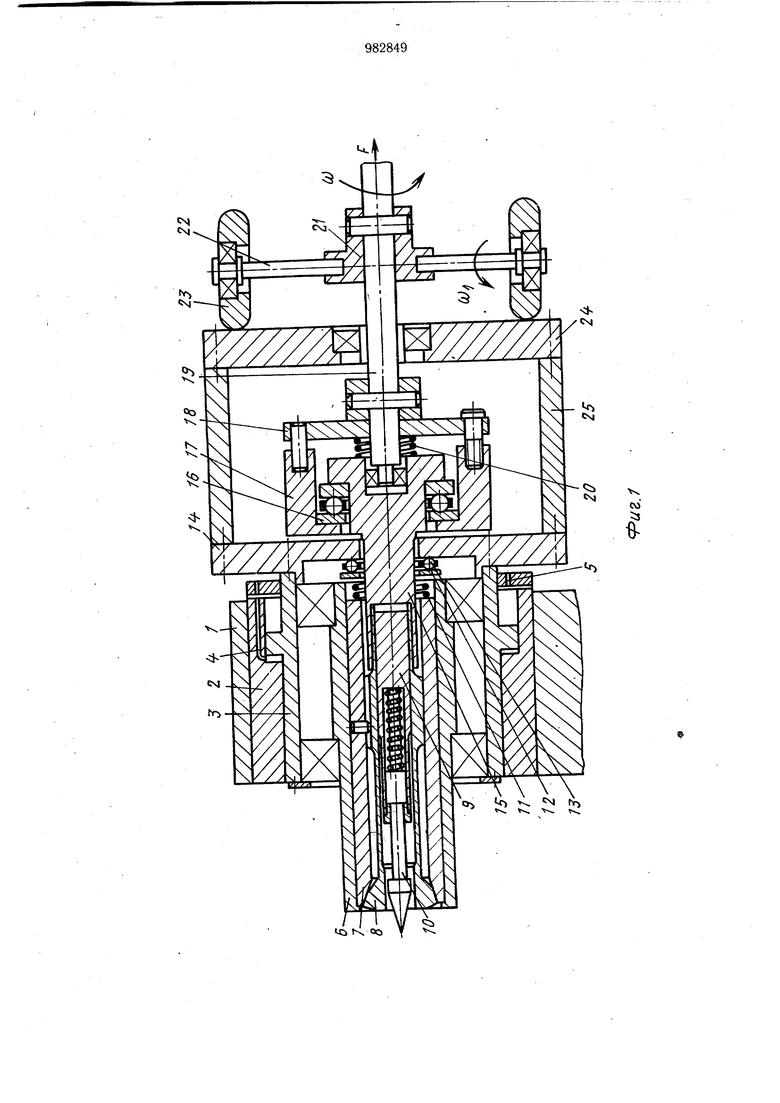
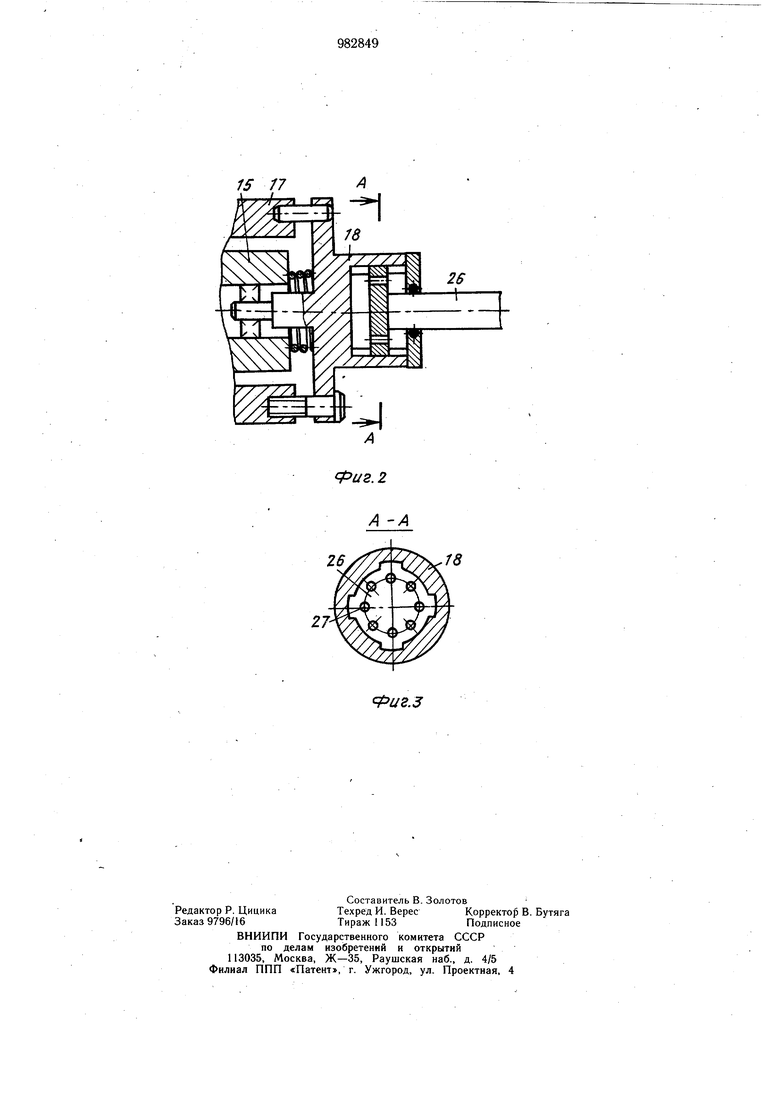
На фиг. 1 представлена задняя бабка токарного станка, продольный разрез; на фиг. 2 - усоверщенствованная конструкция фланца бабки; на фиг. 3 - сечение А-А на фиг. 2.
В корпусе I задней бабки установлена гильза 2, на правом конце которой выполнена расточка. В эту расточку помещен пор. щень, выполненный на гильзе 3. Гильза 2 15 закрыта крыщкой и Образует совместно с гильзой 3 силовой цилиндр выдвижения устройства. Каналы 4 и 5 предназначены для подвода и отвода рабочего тела в полости цилиндров.
В гильзе 3 на подшипниках качения ус тановлена втулка б, в которой по подвижной посадке помещен корпус 7 с цангой 8. Внутри цанги 8 в ее хвостовике неподвижно установлен корпус 9 с подпружиненным составным центром 10. Корпус 7 цанги 8
поджат пружиной 11, которая упирается в кольцо 12 и через сепаратор 13 с шариками в основание 14 механизма натяжения детали. Цанга 8 жестко связана с фланцем 15, который в свою очередь через упорный подшипник 16 взаимодействует с обоймой 17, Обойма 17 жестко связана фланцем 18, который также жестко установлен на валу 19 гироскопа с двумя степенями свободы.
Пружина 20 предназначена для создания натяга в упорном подшипнике 16. На валу 19 жестко закреплена втулка 21, в которой установлены гибкие стержни 22 (Z 2, 4, 6, 8). На гибких стержнях 22 установлены с возможностью вращения инерционные диски 23. Вал 19 установлен в крышке 24 корпуса 25 устройства и фланце 15 и соединен с регулируемым приводом постоянного тбка и системой управления. В усовершенствованной конструкции фланца 18 (фиг. 2) выполнена расточка, в которую помешена ступень вала 26. На поверхности ступени выполнены отверстия 27, а расточка заполнена рабочей средой и образует с крышкой демпфер.
Устройство работает следующим образом.
После установки в патроне станка деталь поджимается подпружиненным центром 10, и бабка закрепляется на станине станка. После врезания резца и обработки начального участка детали, достаточного для зажима, по сигналам системы управления подается команда на выдвижение устройства. Рабочее тело по каналу 5 подается в полость силового цилиндра выдвижения, гильза 3 перемещается относительно неподвижно закрепленной в корпусе 1 задней бабки гильзы 2 влево в осевом направлении. При этом подпружиненный центр 10 утапливается в корпусе 9, преодолевая сопротивление пружины. После выдвижения устройства на заданную величину с системы упраЕ5ления поступает сигнал на регулируемый привод постоянного тока, который начинает вращать вал 19 гироскопа с двумя степенями свободы. Вал 19 начинает вращаться, а вместе с ним вращается втулка 21 с гибкими стержнями 22, при этом инерционные диски 23 начинают вращаться относительно осей гибких стержней 22 и обхватываться по поверхности крышки 24 корпуса 25. Возбуждается гироскопический момент M J-WT-W) (где ) - момент инерции, зависящий- от конструктивных параметров; W - угловая скорость вала 19; Wi -угловая скорость диска 23), который равносилен паре сил F, действующих вдоль оси
вала 19 и через диск 23 на крышку 24. Сумма сил от каждого вращающегося диска 23, которые действуют вдоль оси детали, создает динамическую продольную растягивающую силу,- которая через фланец 18, обойму. 17, упорный подщипник 16,
фланец 15 передается цанге 8. Цанга 8
перемещается относительно корпуса 7 в
осевом направлении и зажимает деталь.
После этого увеличивается угловая скорость вала 19, соответственно возрастают гироскопический момент, динамическая продольная растягивающая сила, которой нагружается деталь через цангу 8.
При регулировании угловой скорости вала 26 рабочая среда перетекает через
отверстия 27 ступени вала 26 из одной полости расточки в другую, и создаются силы вязкого сопротивления, при этом демпфируются возможные колебания, возникающие при обработке и регулироваНИИ.
После окончания обработки и выключения регулируемого привода постоянного тока под действием пружины 20 разгружается обойма 17 и фланец 18 от действия осевой растягивающей силы. Под действием пружины 11 корпус 7 цанги 8 возвращается в исходное положение, цанга разжимается. По каналу 4 в левую полость цилиндра выдвижения устройства подается рабочее тело, и устройство перемещается вправо.
Формула изобретения
Задняя бабка токарного станка, содержащая установленный в корпусе с возможностью вращения механизм зажима в виде
цанги, имеющей привод перемещения от механизма натяжения детали и связанной с валом, несущим фланец с демпфером и обойму, отличающаяся тем, что, с целью упрощр 1ия управления усилием растяжения путем обеспечения линейной зависимости растягивающего усилия от частоты вращения детали, она снабжена закрепленной на корпусе крыщкой, а механизм натяжения выполнен в виде гироскопа с двумя степенями свободы, выполненного в виде жестко закрепленной на -валу втулки с гибкими стержнями и установленных на последних инерционных дисков, контактирующих с поверхностью крышки.
Источники информации, принятые во внимание при экспертизе
IQ Ьх 00
см 5j
8
Риг.2
