Изобретение относится к области машиностроения, а именно к промьилленным роботам, используемым преимущественно для сварки и нанесения лакокрасочных и защитных покрытий.
Известен манипулятор, содержащий направляющую, каретку с исполнительным органом, а также гибкие коммуникации, расположенные в виде параллельных друг другу ветвей tlj.
Недостатком известного манипулятора является быстрая потеря гибкости кожуха коммуникаций из-за наличия в атмосфере распыленного материала, .который отлагается в зазорах сочленений. Кроме того, а сочленениях гибкого кожуха при работе происходит сухое трение, а при скорости возврата исполнительного инструмента при работе на конвейере до 1 м/с, это устройство является практически неработоспособным.
Известен также промышленный робот, содержащий исполнительный орган и гибкие коммуникации, расположенные парсшлельно друг над другом и зафиксированные колодками от взаимного перемещения 2. Недостатком этого л промышленного робота является отсутствие опоры у
гибкиз коммуникаций, что приводит к потере гибкости коммуникаций из-за осаждающего слоя краски или частиц горячего металла.
Целью изобретения являетсй повышение надежности в работе манипулятора путем защиты гибких коммуникаций от распыляемых материсшови исключения контакта с другими элементами
10 конструкции..
Это достигается тем, что манипулятор снабжен коробом, расположенным на нап|)авляющей,и полками, а каждая колодка снабжена роликом,
15 причем цолки выполнены различной длины и размещены в коробе, а ролики установлены с воз ложностью взаимодействия с роликами.
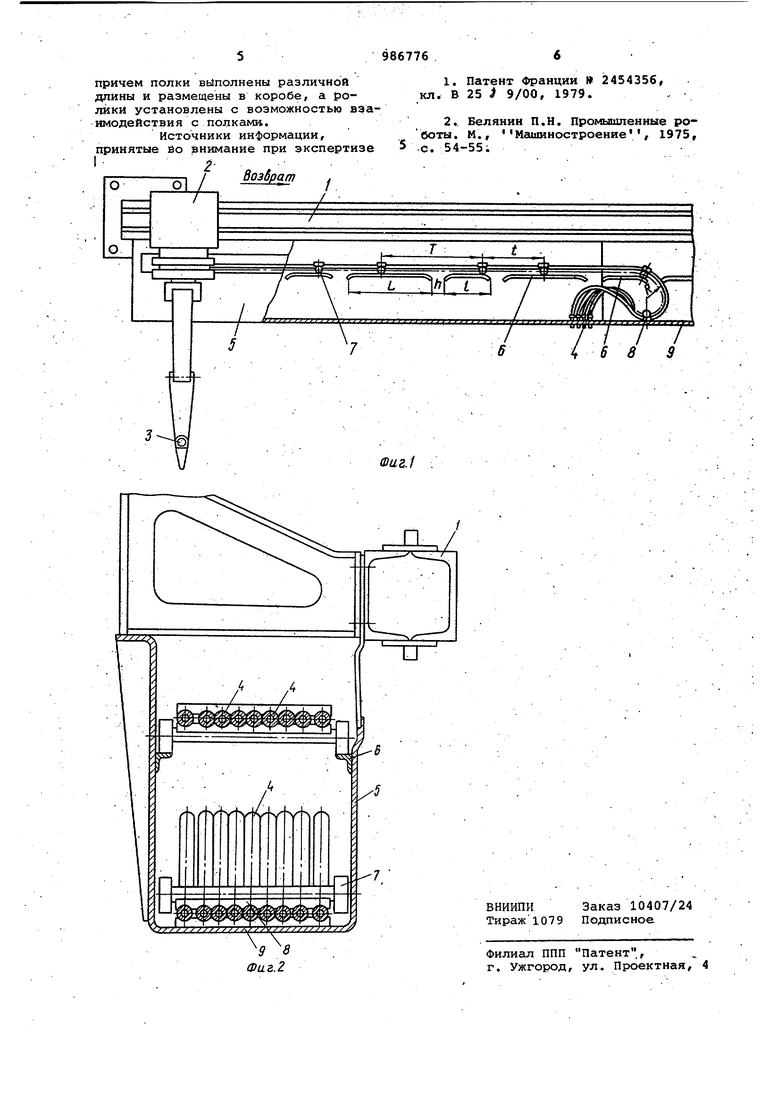
На фиг.1 изображен манипулятор,-.20общий вид; на фиг.2 - короб, поперечный разрез. .
Манипулятор состоит из напревляющей 1, по которой перемещается каретка 2 с исполнительным органом 3, 2 например краскораспылителем. Причем каретка 2 и направляющая 1 соединены между собой гибкими коммуникациями 4, представляющими собой шланги для краски и сжатого воздуха, кабели
30 электропитания приводов и систем управления. Они расположены внутри короба 5 в виде,параллельных друг другу верхней и нижней ветвей, причем последняя соединена своими входами с системами сжатого воздуха, краскоподачи, электропитания и сиетемой управления (не показаны. Короб 5 внутри имеет различающиеся по длине и чередующиеся полки 6. Ролик 7 смонтированы на колодках 8. Колодки 8, в свою очередь, расположен на гибких коммуникациях 4 с разлн-чающимся по длине чередующимся шагом и опираются в своем крайнем ниж нем положении (на нижней ветви) на дно 9 короба 5. Для .обеспечения надежного прохождения роликов 7 между полками 6 зазор между полками 6 целесообразно выбирать равным 1,5-2,0 диаметра роликов 7, а концы полок б на величину диаметра ролика 7 выполнять оп ценными вниз. Высота полок 6 от дна 9 короба 5 не должна быть меньше шага t расположения колодок 8 на гибких коммуникациях 4, и, кроме то го, колодки 8предпочтительно располагать на гибких коммуникациях 4 таким образом, чтобы опущенные вниз концы полок 6располагались по касательной к радиусу изгиба (R) гибких коммуникаций 4. Однако устройство будет нормально работать, если высота полок будет установлена и на высоте меньшей радиуса изгиба (R), но при этом необходимо, чтобы ролик 7 свободно проходил между пол ками 6. При этом варианте установки поло 6 необходим другой опущенный конец полки б, чтобы исключить попадание ролика 7 под полку 6 при прогибе гибких коммуникаций 4 при возвра те колодок 8 с роликами 7 из верхней ветви в нижнюю. .Но несмо тря на весьма небольшую возможность провала двух соседних колодок в зазоры, например, при перемещении каретки 2 на холостом ходу (масло и воздух отключены), размеры Шагов расположения колодок на гибких коммуникациях и размеры и чередование полок должны находиться в определенных соотношениях, а имен L Т - h g t - h где L - длина большой полки; j - длина малой полки; h - зазор между полками; Т - большой шаг расположения колодок на гибких коммуника циях; t - малый шаг расположения колодок на гибких коммуникациях больший и равный минимальному шагу изгиба коммуникаций Нижняя ветвь гибких коммуникаций 4 опирается на дно 9 короба 5 колодкой для уменьшения износа роликов 7 и их осей. Это очень важно, так как возврат в исходное положение при переходе на окраску новой детали производится со скоростью 1 м/с, т.е. динамическая наг рузка на нижнюю ветвь может быть достаточно высокой. Материал колодок и роликов желательно выбирать нейтральным по отношению к краскам и растворителям, например фторопласт. Этот материал обладает и еще одним важным свойством - плохой адгезией к абсолютному большинству используемых в машиностроении красок и растворителей. Устройство работает следующим образом. Исходное положение каретки 2 крайнее правое, когда гибкие коммуникации 4 на большей своей длине опираются колодками 8 на дно 9 короба 5. При перемещении каретки 2 влево верхняя :ветвь гибких коммуникаций 4 тянется за кареткой 2 и по мере подъема рйликов. 7 они проходят в зазор между пблками б и катятся по ним| При достижении крайнего левого положения (как это показано на фиг.1) гибкие коммуникации 4 практически на всю длину переходят из нижней ветви в верхнюю. Во время возврата каретки 2 в исходное положение ролики 7 по мере достижения ими зазора между полками 6 проваливаются и опускаются на дно 9 короба 5. Следующий за провалившимся ролик 7 попадает на полку б, которая находится по другую сторону зазора. Ввиду того, что процессы сушки и подготовки поверхности перед окраской более длительные, чем окраска, то без ущерба для производительности конвейера можно увеличить зону окраски путем размещения каретки с исполнительным органом на другой направляющей, исключив вторЬй робот. В этом случае, хотя и увеличится время окраски, это не повлияет на производительность конвейера. Кроме того, окраска одним роботом упростит программное обеспечение, так как не будет необходимости в синхронизации двух роботов. Формула изобретения Манипулятор, например, окрасочый, содержащий направляющие, карету с исполнительным органом, а также ибкие коммуникации в виде параллельых ветвей, скрепленных колодками, тличающийся тем, что, целью повьшевия надежности в работе утем защиты гибких коммуникаций от аспыляемых материалов и исключения х контакта с другими элементами контрукции, он снабжен коробом, располоенным на направляющей, и полками, каждая колодка снабжена роликом.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТОРГОВЫЙ АВТОМАТ И УСТРОЙСТВО ПЕРЕМЕЩЕНИЯ ТОВАРОВ ДЛЯ ИСПОЛЬЗОВАНИЯ В НЕМ | 2015 |
|
RU2583773C1 |
| Автоматизированный комплекс для многопереходной штамповки | 1986 |
|
SU1349851A1 |
| ВЕРТИКАЛЬНЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2007 |
|
RU2352509C1 |
| Механизированный многоярусный накопитель | 1988 |
|
SU1699866A1 |
| Устройство для передачи штучных грузов | 1988 |
|
SU1518253A1 |
| Исполнительный орган робота | 2015 |
|
RU2653397C2 |
| Манипулятор | 1983 |
|
SU1106652A1 |
| ВЕРТИКАЛЬНЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2007 |
|
RU2350539C1 |
| УСТРОЙСТВО ДЛЯ ХРАНЕНИЯ И ВЫДАЧИ ТОВАРНЫХ ПРЕДМЕТОВ | 2018 |
|
RU2672936C1 |
| Устройство для перемещения захвата манипулятора | 1982 |
|
SU1079599A1 |
