Изобретение относнтоя к автоматике и вычислительной технике и может быть использовано в электромеханических чертежных автоматах с программным управлением.
Известно устройство для контурного программного управления, содержаще интерполятор, соединенный с блоками сравнения, выходы которых через последовательно соединенные координатные приводы и датчики перемещения подключены к входам соответствующих блоков сравнения. Выходные импульсы датчика перемещения .координаты, скорость по которой наибольшая, испольэук ся в качестве тактовых импульсов интерполятора 1.
Однако такое устройство характеризуется низким быстродействием.
Наиболее близким техническим решением к изобретению является контурная систи«а программного управления, содержащая блок задания максимальной ошибки положения и последовательно соединенные первый усилитель, блок сравнения, второй усилитель, управлякхцеё устройство, тактирующее устройство и интерполятор, для каждой {Координаты последовательно соединенные цифроаналоговый преобразоватёль, второй блок сравнения, устройство управления положением, привод и датчик положения, выход которого подключен к первому входу второго блока сравнения данной координаты, второй вход которого подключен к соответствующему входу интерполятора, а выход блока задания максимальной ошибки положения подключен к вто10рому входу блока сравнения 2.
Недостатком известного устройства является невысокая динамическая точность обработки входного воздействия системы.
15
Целью изобретения является повышение динамической точности системы и скорости обработки программы.
Поставленная цель достигается тем, что в контурную систему програм20много управления,содержащую последовательно соединенные блок выбора максимальной ошибки положения, блок сравнения, управляемый генератор и интерполятор, для каждой координаты
25 последовательно соединенные первый реверсивный счетчик импульсов, цифроаналоговьй прербразователь, привод и датчик положения, выход которого соединен с вычитающим входом
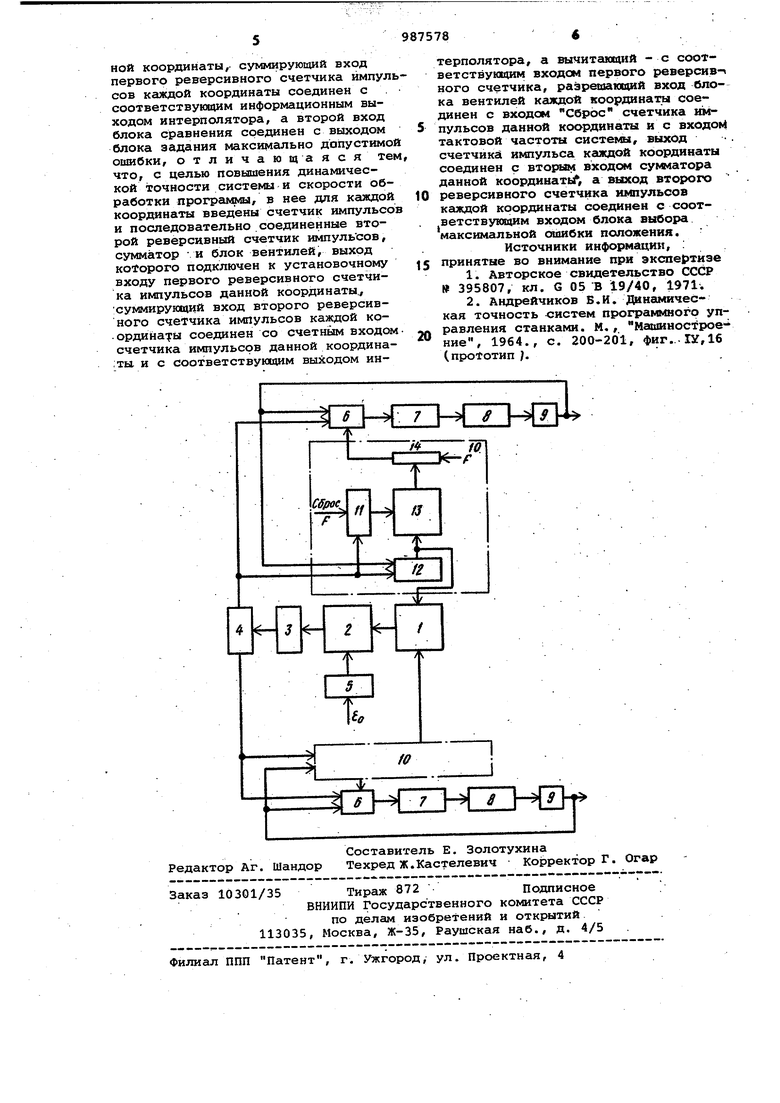
30 первого реверсивного счетчика импульсов данной координаты, суммнрук ,1ций вход первого реверсивного счетчика импульсов каждой координаты соединен с соответствующим информацион ным выходом интерполятора, а второй вход блока сравнения соединен с выходом блока задания максимально допустимой ошибки, введены для каждой | оординаты счетчик импульсов .и после довательно соединенные второй реверсивный счетчик импульсов, сумматор и блок вентилей, выход которого подклю чей к установочному входу первого ре версивного : счетчика импульсов данной координаты, суммирующий вход второго реверсивного счетчика импульсов каждой координаты соединен со счетным входом счетчика импульсов данной координаты и с соответствующим выходом интерполятора, а вычитающий - с соответствующим входом первого реверсивного счетчика, разрешающий вход блока вентилей каждой координаты соединен с входом Сброс счетчика импульсов данной координаты и с входом тактовой Частоты системы, выход счетчика импульсов каждой координаты соединен с вторым входом сумматора данной координаты, а выход второго реверсивного счетчика импульсов каждой координаты подключен к соответствугацему вход блок выбора максимальной ошибки по. ложения. На чертеже изображена блок-схема предлагаемой контурной системы программного управления. . Контурная система содержит блок выбора максимальной ошибки, ,блок 2 сравнения, управляемый генератор 3, интерполятор 4, блок 5 задания максимально допустимой ошибки положения и для каждой координаты первый реверсивный счетчик б импульсов, циф роаналоговый преобразователь 7, привод 8, датчик 9 положения и блок 10 компенсации, который состоит из счет чика 11 импульсов, второго реверсивного счетчика 12 импульсов, сумматор 13 и блока 14,вентилей.Контурная система программного уп равления работает следующим образом. На входы счетчика 12 импульсов поступают импульсы унитарного кода: на суммирующий вход - из интерполято ра 4, а на вычитаквдий поступают импульсы обратной связи из датчиков 9 положения. Динамические ошибки по обеим координатам с(/,и «/5, -образуемые в счетчиках 12 импульсов, поступают в цифровом виде в блок 1 выбора максимальной ошибки положения и большая из них по абсолютной величине вычитается в блоке 2 сравнения из заданной величины ошибки g, занесенной в блок 5 задания.максимально допустимой ошибки. Разность между заданной и большей из ошибок по абсолютной величине V- Q-Tnay{|d | 3 определяют выходную величину f KV управляемого генератора 3. {Здесь i - номер координаты, а К - коэффициент пропррциональностиХОдновременно динамические ошибки cfj поступают из счетчиков 12 импульсов в сумматор 13, где образуются суммы динамических ошибок с соответствующими числами импульсов дб- , поступающих из интерполятора 4 в счетчик 11 импульсов за период времени Т. Образованные таким образом .суммыЦ. t/:j дв; из сумматоров 13 передаются импульсами занесения, поступающими на входы блока 14 с частотой Р, в реверсивный счетчик импульсов 6. Стой же частотой F сбрасываются в ноль счетчики 11 импульсов., Поскольку в реверсивном счетчике б импульсов суммы сиг налов ZIj поступают только один раз за продолжительный период Т,то для поддержания непрерывного процесса слежения в интервале времени между моментами их поступления в реверсивные счетчики поступают импульсы из интерполятора 4 и импульсы обратной связи из датчиков 9 положения. Дополнительные сигналы Л0 вызывают увеличение числа оборотов двигателей координатных приводов, .т.д. увеличение частоты импульсов обратной связи, поступающих с датчиков 9 положения на вычитающие входы счетчиков 12 импульсов. Это приводит к уменьшению величин ошибок cAj, образующихся в счетчиках 11 и 1пульсов. Уменьшение же ошибок приводит к автоматическому увеличению частоты импульсов, поступающих из управляемого генератора 3 в интерполятор 4, т.е. приводит в конечном итоге к уменьшению динамической ошибки контурной системы. Таким образом, предлагаемое устройство за счет введения блоков компенсации позволяет уменьшить динамическую ошибку контурной системы программного управления, а следовательно, увеличить контурную скорость отработки программы. Формула изобретения Контурная система программного .управления, содержащая последовательно соединенные блок выбора максимальной ошибки положения, блок .сравнения, управляемый генератор и интерполятор, для каждой координаты последовательно соединенные первый реверсивный счетчик импульсов, цифроаналоговый преобразователь, привод и датчик положения, выход которого соединен с вычитающим входом первого реверсивного счетчика импульсов данной координаты, суммирующий вход первого реверсивного счетчика импульсов каждой координаты соединен с . соответствующим информационным выходом интерполятора, а второй вход блока сравнения соединен с выходом блока задания максимально допустимой ошибки, отличающаяся тем что, с целью повышения динамической точности системы и скорости обработки програшоы/ в нее для каждой координаты введены счетчик импульсов и последовательно соединенные второй реверсивный счетчик импульсов, сумматор И блок вентилей, выход которого подключен к установочному входу первого реверсивного счетчика импульсов данной координаты., суммирующий вход второго реверсивного счетчика импульсов каадой координауы соединен со счетным входомсчетчика импульсов данной координа:ти и с соответствующим выходом интерполятора, а вычитающий - с соответствующим входом первого реверсив-ч ного счетчика, разрешающий вход бло- ка вентилей кгикдой координата соединен с входом Сброс счетчика импульсов данной координаты и с входом тактовой частоты снсчема, выход счетчика импульса каждой координаты соединен с втopы 4 входом сумматора данной кoopдинaтьf, а выход второго реверсивного счетчика импульсов каждой координаты соединен с соот ветствующим входом блока выбора максимальной сшибки положения.
Источники информации, : принятые во внимание при экспертизе
5
1.Авторское свидетельство СССР 395807, кл. G 05 В 19/40, 1971.
2.Андрейчиков Б.И. Динамическая точность систем программного управления станками. М., Машинострое0ние, 1964., с. 200-201, фиг. ГУ,16 (прототип ;.
| название | год | авторы | номер документа |
|---|---|---|---|
| Контурная система программного управления | 1991 |
|
SU1800446A1 |
| Устройство для программного управления | 1985 |
|
SU1290263A1 |
| Устройство для программного управления положением объекта | 1987 |
|
SU1520479A1 |
| Система числового программногоупРАВлЕНия "TPACCA-Кп | 1979 |
|
SU813371A1 |
| Устройство для программного управления | 1984 |
|
SU1215089A1 |
| Способ сварки и устройство для его осуществления | 1987 |
|
SU1493408A1 |
| Цифровой линейный интерполятор с оценочной функцией | 1981 |
|
SU991375A1 |
| Многоканальное устройство для программного управления | 1978 |
|
SU748431A1 |
| Устройство для программного управления | 1986 |
|
SU1376065A1 |
| Интерполятор с самоконтролем | 1985 |
|
SU1280576A1 |
