(54) МЕХАНИЗМ ВЫСАДКИ ГВОЗДИЛЬНОГО АВТОМАТА
| название | год | авторы | номер документа |
|---|---|---|---|
| Гвоздильный автомат | 1978 |
|
SU751486A1 |
| Гвоздильный автомат | 1975 |
|
SU512843A1 |
| Гвоздильный автомат | 1980 |
|
SU971552A1 |
| Механизм зажима проволоки кгВОздильНОМу АВТОМАТу | 1979 |
|
SU827222A1 |
| Одноударный автомат для высадки гвоздей | 1982 |
|
SU1050793A1 |
| Проволочно-гвоздильный автомат | 1977 |
|
SU766716A1 |
| Шайбонавивочный автомат | 1979 |
|
SU810347A1 |
| Высадочный двухударный автомат | 1981 |
|
SU984604A2 |
| АВТОМАТ ДЛЯ ИЗГОТОВЛЕНИЯ ГВОЗДЕЙ ИЗ ПРОВОЛОКИ | 1972 |
|
SU359086A1 |
| Гвоздильный автомат | 1981 |
|
SU988432A1 |
1
Изобретение относится к устройствам для изготовления гвоздей и может быть применено в гвоздильных автоматах.
Известен гвоздильный автомат, механизм высадки которого состоит из ползуна с закрепленными в нем высадочным инструментом и привода, представляющего собой кривошипно-шатунный механизм 1.
Недостатком этого механизма высадки является большой холостой ход высадочного ползуна, так как при ходе назад после высадки ползун должен пропустить перед собой гвоздь. Вследствие этого холостой ход превышает рабочий ход в, 40-50 раз, что вызывает большие динамические нагрузки на ползуне- и повышенный шум механизма.
Известен гвоздильный автомат, механизм высадки которого состоит из кинематически связанного с приводны.м валом высадочного ползуна, в пазу которого смонтирован камень, несуш,ий эксцентрик, установленный с возможностью поворота относительно камня и относительно шарнирно размещенной на станине оси, и второй эксцентрик, жестко соединенный с первым и
посредством шатуна связанный с приводным валом 2.
Однако известный механизм высадки имеет сложную конструкцию и недостаточно надежен.
5Цель изобретения - упрощение конструкции и повышение его надежности.
Поставленная цель достигается тем, что механизм высадки гвоздильного автомата, содержащий кинематически связанный с
Q приводным валом вь1садочный ползун, в пазу которого смонтирован камень несущий эксцентрик, установленный с возможностью поворота относительно камня и относительно шарнирно размещённой на станине оси, и второй эксцентрик, жестко соединенный с15 первым и посредством шатуна, связанный с приводным валом имеет дополнительный ползун, размещенный в направляющих станины с возможностью возвратно-поступательного перемещения в направлении оси
20 высадки, внутри которого смонтирован высадочный ползун с возможностью качательного перемещения в направлении, перпендикулярном оси высадки, высадочный и дополнительный ползуны имеют общую шарнирно соединяющую их ось, которая посредством шатуна кинематически связана с приводным валом, при этом (латун привода ползунов и 1натун привода эксцентриков распо.южены в плоскости вдоль высадки и имеют одинаковые приведенные массь.
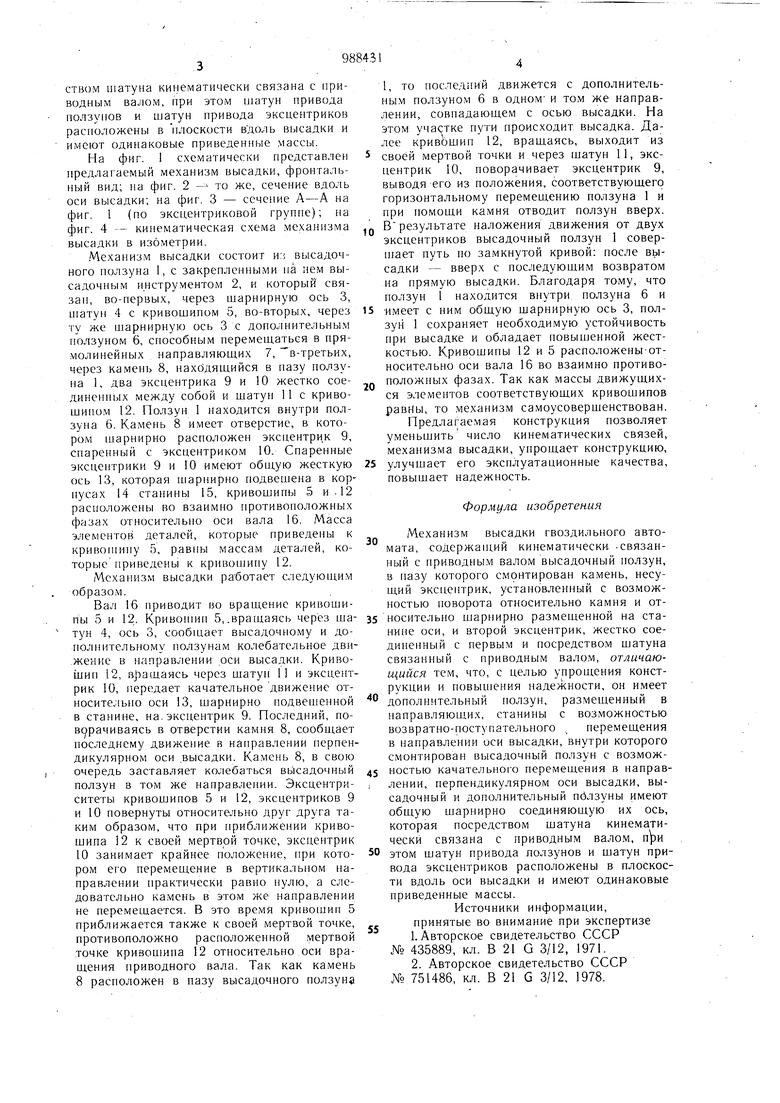
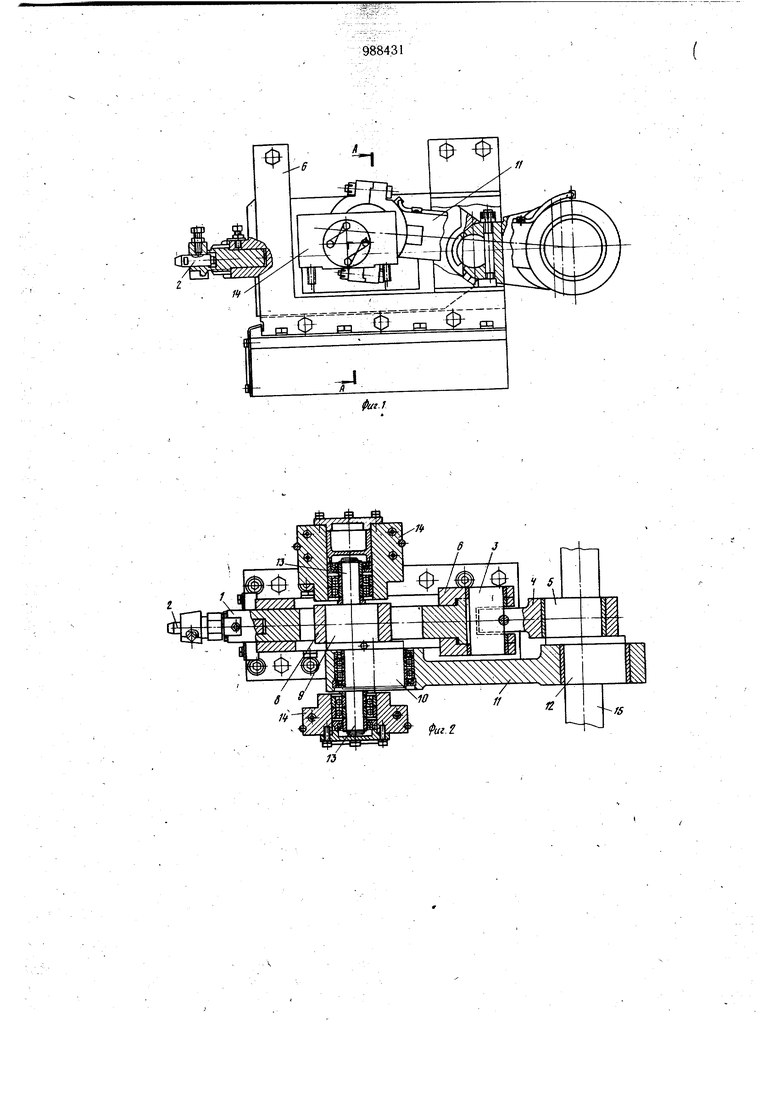
На фиг. 1 схематически представлен 11ред 1агаемый механизм высадки, фронтальный вид; на фиг. 2 - то же, сечение вдоль оси высадки; на фиг. 3 - сечение А-А на фиг. 1 (по эксцентриковой группе); на фиг. 4 - кинематическая схема .механизма высадки в изометрии.
Механизм высадки состоит и:-; высадочного ползуна 1, с закрепленными па нем высадочным инструментом 2, и который связан, во-нервых, через шарнирную ось 3, шатун 4 с кривошипом 5, во-вторых, через ту же шарнирную ось 3 с допо.лнительным ползуном 6, снособным неремешатьея в прямолинейных направляющих 7, в-третьих, через камепь 8, нахбдящийся в пазу ползуна 1, два эксцентрика 9 и 10 жестко соединенных между собой и шатун 11 с кривошипом 12. Ползун 1 находится внутри ползуна 6. Камень 8 имеет отверстие, в котором нарнирно расположен эксцентрцк 9, спаренный с эксцентриком 10. Спаренные эксцентрики 9 и 10 имеют обшую жесткую ось 13, которая шарнирно подвешена в корпусах 14 станины 15, кривошипы 5 и. 12 расположены во взаимно нротивоноложных фазах относительно оси вала 16. Масса элементов деталей, которые приведены к кривопшиу 5, равны массам деталей, которые приведены к кривошипу 12.
Механизм высадки работает с,:1едуюп1им образом.
Вал 16 приводит во вращение кривошипы 5 и 12. Кривонтп 5,.врашаясь через шатун 4, ось 3, сообшает высадочному и дополнительному нолзунам колебательное дви.жение в направлении оси высадки. Кривошип 12, вращаясь через шатуп 11 и эксцентрик 10, передает качательное движение относительно оси 13, шарнирно подвешенной в станине, на,эксцентрик 9. Последний, новс рачиваясь в отверстии камня 8, сообщает последнему движение в направлении перпендикулярном оси .высадки. Ка.мень 8, в свою очередь заставляет колебаться вь1садочный нолзун в том же направлении. Эксцентриситеты кривошипов 5 и 12, эксцентриков 9 и 10 повернуты относительно друг друга таким образом, что при приближении кривошипа 12 к своей мертвой точке, эксцентрик 10 занимает крайнее положение, при котором его перемещение в вертикальном направлении практически равно нулю, а следовательно камень в этом же направлении не перемещается. В это вре.мя кривошип 5 приближается также к своей .мертвой точке, противоположно расположенной мертвой точке кривошина 12 относительно оси вращения приводного вала. Так как камень 8 расположен в пазу высадочного ползуна
1, то последний движется с дополнительным ползуном 6 в ОДНОМ и том же направлении, совпадающем с осью высадки. На этом пути происходит высадка. Далее кривошип 12, вращаясь, выходит из
своей мертвой точки и через шатун 11, эксцентрик 10, поворачивает эксцентрик 9, выводя его из положения, соответствующего горизонтальному перемещению ползуна 1 и при помощи камня отводит ползун вверх.
В результате наложения движения от двух эксцентриков высадочный ползун 1 совершает путь по замкнутой кривой: после вь1садки - вверх с последующим возвратом на прямую высадки. Благодаря тому, что ползун 1 находится внутри ползуна 6 и
и.меет с ним общую шарнирную ось 3, ползун 1 сохраняет необходимую устойчивость при высадке и обладает повышенной жесткостью. Кривошипы 12 и 5 расположеньготносительно оси вала 16 во взаимно противоположных фазах. Так как массы движущихся элементов соответствующих кривощипов равны, то механизм самоусовершенствован. Предлагаемая конструкция позволяет уменьшить число кинематических связей, механизма высадки, упрощает конструкцию,
улучшает его эксплуатационные качества, повышает надежность.
Формула изобретения
Механизм высадки гвоздильного автомата, содержаний кинематически .связанный с приводным валом высадочный нолзун, в пазу которого смонтирован камень, несущий эксцентрик, установленный с возможностью поворота относительно камня и от5 носительно шарнирно размешенной на станине оси, и второй эксцентрик, жестко соединенный с первым и посредством шатуна связанный с приводным валом, отличающийся тем, что, с целью упрощения конструкции и повышения надежности, он имеет дополнительный ползун, размещенный в направляющих, станины с возможностью возвратно-поступательного . перемещения в направлении оси высадки, внутри которого смонтирован высадочный ползун с возмож5 ностью качательного перемещения в направлении, перпендикулярном оси высадки, высадочный и дополнительный пблзуны имеют общую щарнирно соединяющую их ось, которая посредством шатуна кинематически связана с нриводным валом,
0 этом шатун привода ползунов и шатун привода эксцентриков расположены в плоскости вдоль оси высадки и имеют одинаковые приведенные массы.
Источники информации, принятые во внимание при экспертизе
