(54) ВЫСАДОЧНЫЙ ДВУХУДАРНЫЙ АВТОМАТ
| название | год | авторы | номер документа |
|---|---|---|---|
| Высадочный двухударный автомат | 1977 |
|
SU721224A1 |
| Высадочный двухударный автомат | 1977 |
|
SU635667A1 |
| Двухударный однопозиционный автомат для холодной высадки деталей стержневого типа | 1982 |
|
SU1084102A1 |
| Горизонтально-ковочная машина | 1983 |
|
SU1505657A1 |
| Гвоздильный автомат | 1980 |
|
SU971552A1 |
| АВТОМАТ ДЛЯ ИЗГОТОВЛЕНИЯ ИЗ ПРОВОЛОКИ ИЗДЕЛИЙ С ГОЛОВКАМИ | 1991 |
|
RU2022677C1 |
| Холодновысадочный автомат | 1984 |
|
SU1281330A1 |
| Гвоздильный автомат | 1981 |
|
SU988432A1 |
| Гвоздильный автомат | 1982 |
|
SU1121085A1 |
| Обжимной автомат | 1986 |
|
SU1378998A1 |
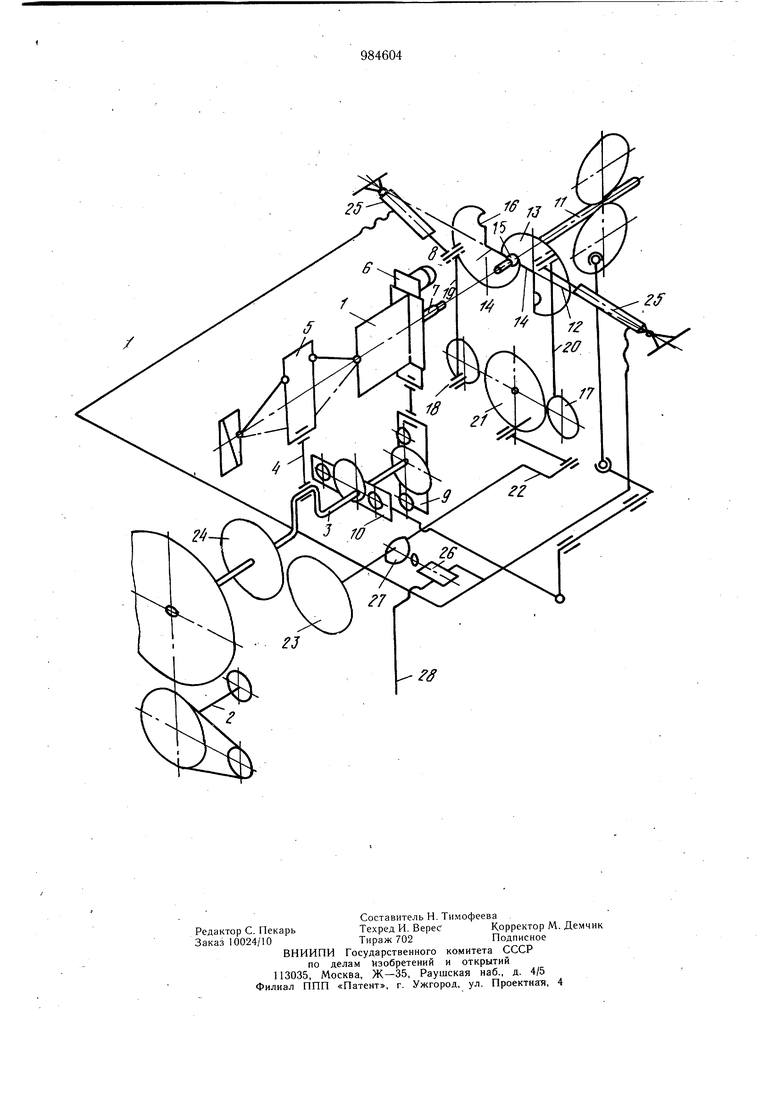
1, Изобретение относится к кузнечно-прессовому оборудованию и может быть использовано для высадки изделий. Известен двухударный автомат для высадки, содержащий ползун с приводом перемещения вдоль оси высадки, приводной инструментальный блок с двумя пуансонами, смонтированный на ползуне с возможностью поперечного относительно оси высадки перемещения для поочередной установки пуансонов на позицию высадки, механизм пода,чи заготовки .и матричный блок из двух смыкающихся от привода полуматриц с держателями 1. По основному авт. св. № 721224 известен высадочный двухударный автомат, содержащий ползун с приводом перемещения вдоль высадки, инструментальный блок с двумя пуансонами, смонтированный на ползуне с возможностью перпендикулярного к оси высадки возвратно-поступательного перемещения от привода для поочередной установ1 и пуансонов на., позицию высадки, механизм подачи материала и матричный блок, составленный из двух смыкающихся от, привода полуматриц с держателями, выполненными в виде дисков с секторными вырезами для установки полуматриц, а привод смыкания полуматриц выполнен в виде соединенных с держателями посредством тяг и эксцентриковых втулок двух КрИБОщипов, связанных через промежуточную щестерню с главным кривошипом, вмонтированным в привод ползуна 2. Однако в известном автомате смыкание полуматриц осуидествляется за счет тяжело нагруженных тяг, кривощипов, щестерен, которые в результате больщой нагрузки преждевременно изнащиваются, что снижает надежность работы автомата. Цель изобретения - повыщение надежн.ости работы автомата. Поставленная цель достигается за счет того, что высадочный двухударный автомат, содержащий ползун с приводом перемещения вдоль высадки, инструментальный блок с двумя пуансонами, смонтированный на ползуне с возможностью перпендикулярногб к оси высадки возвратно-поступательного перемещения от привода для. поочередной установки пуансонов на позицию высадки, механизм подачи материала и матричный блок, составленный из двух смыкающихся от привода полуматриц с держателями, выполненными в виде дисков с секторными вырезами для установки полуматриц, а нривод смыкания полуматриц выполнен в виде соединенных с держателями посредством тяг и эксцентриковых втулок двух кривошипов, связанных через промежуточную шестерню с главным кривошипом, вмонтированным в привод ползуна, снабжен механизмом прижима полуматриц, выполненным в виде двух гидроцилиндров, шарнирно закрепленных на станине и взаимодействующих штоками с держателями полуматриц, а также соединенного с гидроцилиндрами гидрораспределителя, связанного через кулачок с приводом смыкания полуматриц. На чертеже представлена кинематическая схема автомата. Автомат содержит ползун 1 с приводом 2 перемешения ползуна в направлении высадки, включающим расположенный параллельно оси высадки коленчатый вал 3, шатун 4, и двухколенное «ломаюш,ееся в обе стороны от нейтрального положения звено 5. На рабочей части ползуна 1 смонтирован инструментальный блок 6 с двумя высадочными пуансонами 7 и 8. Инструментальный блок 6 имеет возможность поперечного относительно оси высадки перемеш,ения от кулачкового привода 9 для поочередной установки пуансонов 7 и 8 на позицию высадки. Механизм 10 с приводом от коленвала 3 осуществляет подачу заготовки 11 в матричные блоки 12, состоящие из двух держателей 13. Держатели 13 имеют форму дисков с секторными вырезами 14, на которых закреплены полуматрицы 15 и 16 первого и второго переходов высадки. Держатели 13 смонтированы на осях с возможностью качания для поочередного смыкания полуматриц 15 и 16. Привод качания держателей 13 выполнен в виде двух кривошипов 17 и 18, связанных с держателями 13 посредством тяг 19 и 20. Кривошипы 17 и 18 через промежуточную шестерню 21 получают качательное движ-ение от кривошипа 22, связанного с приводом ползуна шестернями 23 и 24. При этом кривошипы 17, 18 и 22 расположены таким .образом, что в момент смыкания полуматриц они находятся в «мертвых точках. Механизм прижима полуматриц снабжен гидроцилиндрами 25, связанными с держателями 13, а также гидрораспределителем 26, который через кулачок 27 связан с коленчатым валом 3. Магистралью 28 гидроцилиндры 25 и гидрораспределитель 26 соединены с источником высокого давления.. Автомат работает следующим образом. Рабочее движение высадки от коленчатого вала 3 через шатун 4 и двухколенное «ломающееся звено 5 передается высадочному ползуну 1 и пуансонам 7 и 8 инструментального блока 6. Одновременно от коленчатого вала 3 движение передаётся на кулачковый привод 9 поперечного перемещения инструментального блока 6 для поочередной установки пуансонов 7 и 8 на позицию высадки. Кроме того, от коленчатого вала 3 движение передается механизму 10 подачи заготовки 11, а также механизму качания держателей 13 полуматриц 15 и 16. За один оборот коленвала 3 ползун 1 совершает два хода, при этом горячая заготовка И (пруток) подается только один раз, а инструментальный блок 6 совершает прямой и обратный ход, в крайних положениях которого пуансоны 7 и 8 поочередно участвуют в процессе высадки. За один оборот кривошипного вала 22 промежуточная шестерня 21 делает одно качательное движение в прямом и обратном направлениях. При этом кривошипы 17 и 18 попеременно поворачиваются на 180°, поворачивают держатели 13 и в крайних «мертвых точках смыкают полуматрицы 15, зажимая заготовку 11 в момент высадки. Другая пара полу.матриц 16 в это время находится вне зоны воздействия горячей заготовки 11, интенсивно охлаждается и смазывается. Сравнительно кратковременный контакт полуматриц с горячей заготовкой обеспечивает их высокую стойкость и надежность в эксплуатации. После смыкания полуматриц через гидрораспределитель 26 и магистраль 28 в гидроцнлиндры 25 подается высокое давление. Это давление поддерживается только в момент высадки, обеспечивая надежное смыкание матриц. Тяги 19 и 20, шестерня 21, кривошип 22 и другие элементы при этом разгружены и выполняют чисто кинематические функции, смыкая и размыкая полуматрицы после того, как давление в гидроцилиндрах 25 снято. При врашении держателей 13 гидроцилиндры 25 всасывают или нагнетают жидкость через распределитель из обычного бака подпитки (не показан). Предлагаемый автомат по сравнению с прототипом обеспечивает надежную работу за счет снятия нагрузок с элементов привода смыкания полуматриц. Формула изобретения Высадочный двухударный автомат по авт. св. № 721224, отличающийся тем, что, с целью повышения надежности работы, он снабжен механизмом прижима полуматриц, выполненным в виде двух гидроцилиндров, шарнирно закрепленных на станине и взаимодействуюших штоками с держателями полуматриц, а также соединенного с гидроцилиндрами гидрораспределителя, связанного через кулачок с приводом смыкания полуматриц. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 370725, кл. В 21 J 7/14, 1972. 2.Авторское свидетельство СССР № 721224, кл. В 21 J 5/08, 1977 (прототип).
