При определенном усилии зажима детали подача рабочего тела в камеры 1 прекращается, реле Ю подключает то- копроводящие слои 6 и 7 к источнику
напряжения, в результате электрореологическая жидкость 5 затвердевает и камеры 3 надежно фиксируют предмет. 3 ил.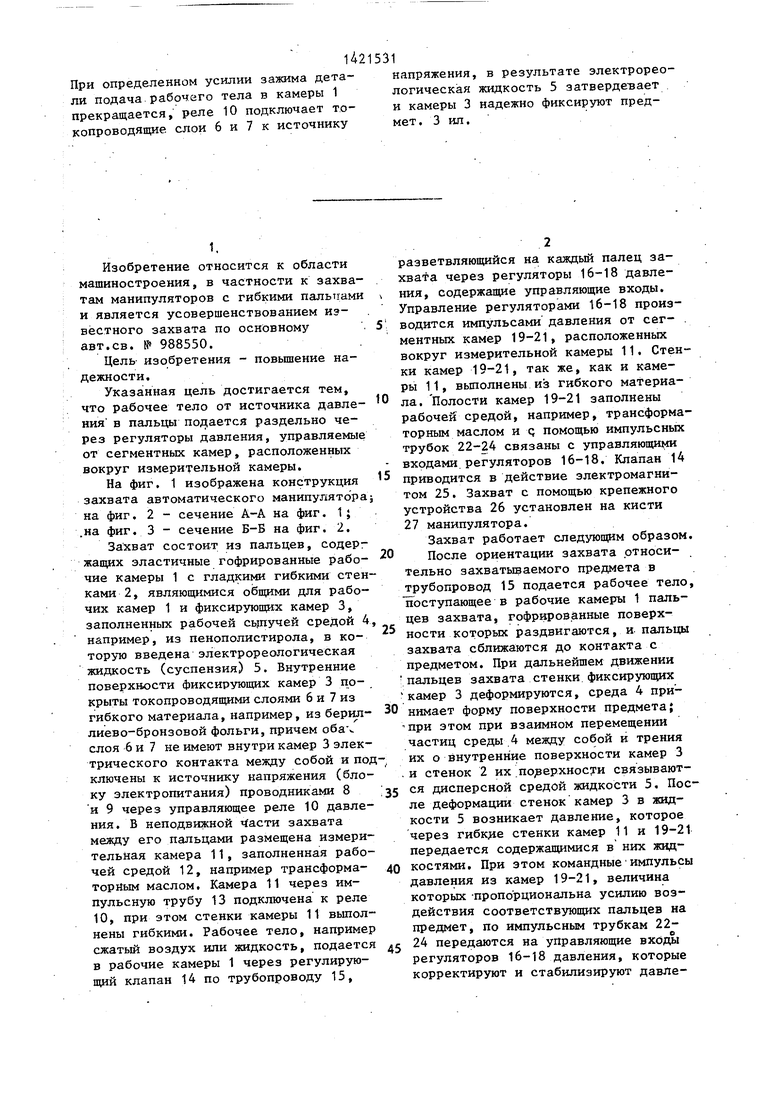
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват автоматического манипулятора | 1981 |
|
SU988550A1 |
| СХВАТ МАНИПУЛЯТОРА | 1999 |
|
RU2147277C1 |
| Тактильный сенсор промышленного робота | 1981 |
|
SU1074711A1 |
| Пневмоцилиндр | 1983 |
|
SU1201565A1 |
| Адаптивный пневматический захват | 1986 |
|
SU1463471A1 |
| Схват манипулятора | 1989 |
|
SU1689068A1 |
| Гидравлический манипулятор | 1982 |
|
SU1042990A2 |
| СИСТЕМА ВИРТУАЛЬНОЙ РЕАЛЬНОСТИ И ТЕЛЕРЕАЛЬНОСТИ | 1995 |
|
RU2131621C1 |
| Устройство для воздушного отопления помещений | 1986 |
|
SU1423868A2 |
| Устройство для управления отопительным агрегатом | 1982 |
|
SU1062478A1 |
Изобретение относится к машиностроению, в частности к захватам автоматических манипуляторов с гибкими пальцами. Целью изобретения является ff Р - i I повышение надежности. При захвате предмета рабочее тело подается в рабочие камеры 1 от трубопровода 15 через регуляторы давления 16,17,18. Управляющие входы регуляторов давления подключены к сегментным камерам. Захватываемый предмет воздействует . на стенки фиксирующих камер 3, в рабочей среде 4 возникает давление, которое через гибкие стенки передается рабочим средам сегментных и измерительной камер.- Это давление в виде командных импульсов подается на управляющие входы регуляторов давления 16,17j18 и на реле давления 10. (Л tc ел со Ю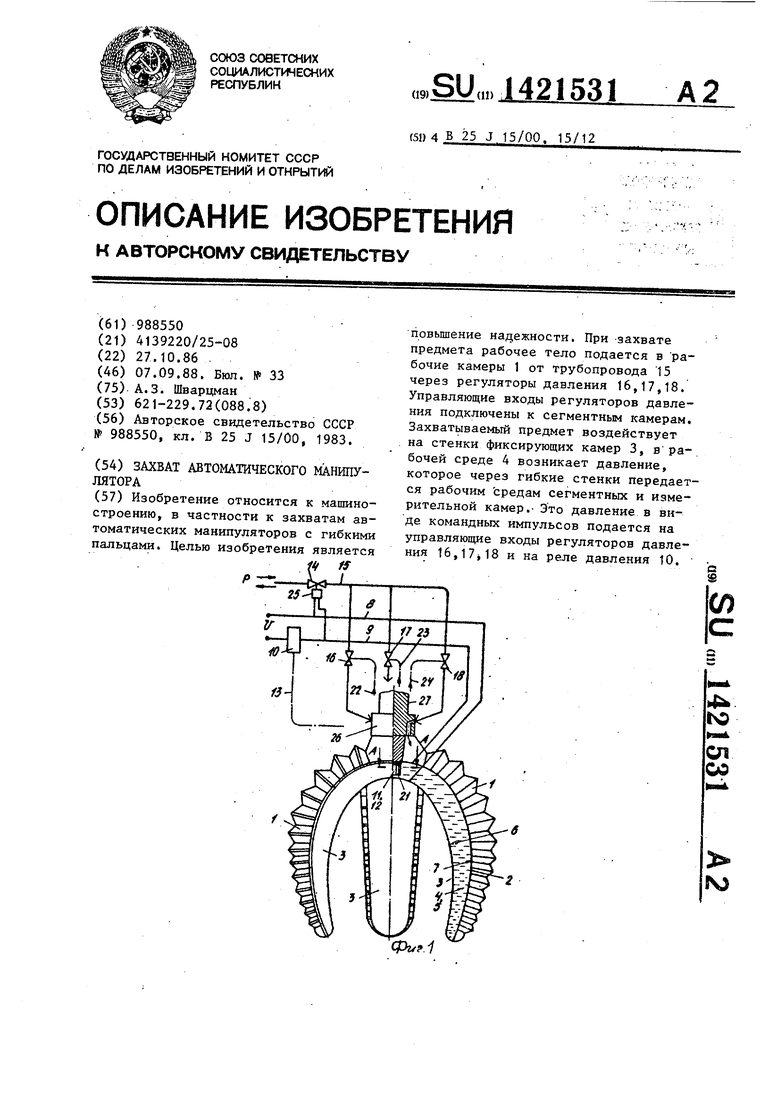
1,
Изобретение относится к области машиностроения, в частности к захватам манипуляторов с гибкими пальттами и является усовершенствованием известного захвата по основному авт.св. № 988550.
Цель- изобретения - повьшение надежности.
Указанная цель достигается тем, что рабочее тело от источника давления в пальцы под1ается раздельно через регуляторы давления, управляемые от сегментных камер, расположенных вокруг измерительной камеры.
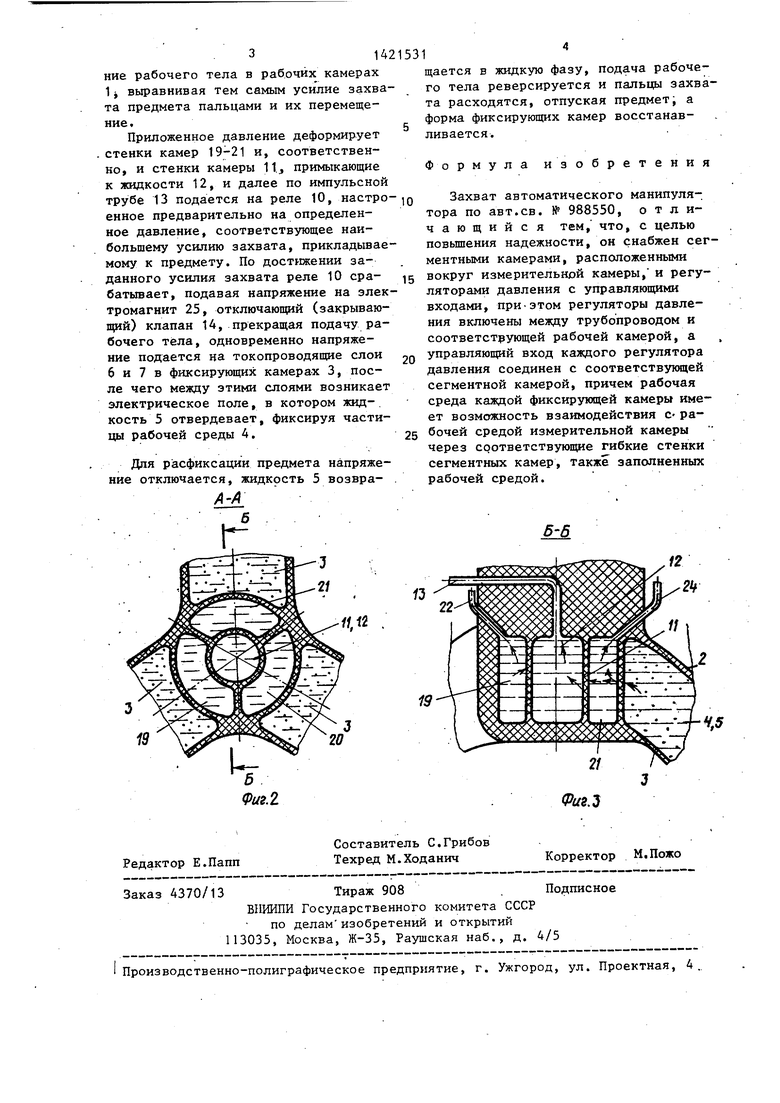
На фиг. 1 изображена конструкция захвата автоматического манипулятора на фиг. 2 - сечение А-А на фиг. 1} .на фиг. 3 - сечение Б-Б на фиг. 2.
Захват состоит из пальцев, содержащих эластичные гофрированные рабочие камеры 1 с гладкими гибкими стенками 2, являющимися общими для рабочих камер 1 и фиксируюшдх камер 3, заполненных рабочей сьщучей средой 4 например, из пенополистирола, в которую введена электрореологическая жидкость (суспензия) 5. Внутренние поверхности фиксирующих камер 3 покрыты токопроводящими слоями 6 и 7 из гибкого материала, например, из берил- лиево-бронзовой фольги, причем обач слоя 6 и 7 не имеют внутри камер 3 электрического контакта между собой и поключены к источнику напряжения (блоку электропитания) проводниками 8 и 9 через управляющее реле 10 давления. В неподвижной захвата между его пальцами размещена измерительная камера 11, заполненная рабочей средой 12, например трансформаторным маслом. Камера 11 через импульсную трубу 13 подключена к реле 10, при этом стенки камеры 11 вьшол- нены гибкими. Рабочее тело, например сжатый воздух или жидкость, подается в рабочие камеры 1 через регулирующий клапан 14 по трубопроводу 15,
5
0
5
0
5
0
5
разветвляющийся на каждый палец захвата через регуляторы 16-18 давления, содержащие управляющие входы. Управление регуляторами 16-18 производится импульсами давления от сегментных камер 19-21, расположенных вокруг измерительной камеры 11. Стенки камер 19-21, так же, как и камеры 11, выполнены из гибкого материала. Полости камер 19-21 заполнены рабочей средой, например, трансформаторным маслом и q помощью импульсных трубок 22-24 связаны с управляющи1 и входами регуляторов 16-18. Клапан 14 приводится в действие электромагнитом 25. Захват с помощью крепежного устройства 26 установлен на кисти 27 манипулятора.
Захват работает следующим образом. После ориентации захвата относительно захватываемого предмета в трубопровод 15 подается рабочее тело,
поступающее в рабочие камеры 1 пальцев захвата, гофрированные поверхности которых раздвигаются, и пальцы захвата сближаются до контакта с предметом. При дальнейшем движении
пальцев захвата стенки фиксирующих
камер 3 деформируются, среда 4 принимает форму поверхности предмета;
при этом при взаимном перемещении частиц среды 4 между собой и трения их о внутренние поверхности камер 3
. и стенок 2 их порерхнос и связываются дисперсной средой жидкости 5. После деформации стенок камер 3 в жидкости 5 возникает давление, которое через гибкие стенки камер 11 и 19-21 передается содержащимися в них жидкостями. При этом командные импульсы давления из камер 19-21, величина которых -пропорциональна усилию воздействия соответствующих пальцев на предмет, по импульсным трубкам 22- 24 передаются на управляющие входа регуляторов 16-18 давления, которые корректируют и стабилизируют давление рабочего тела в рабочих камерах 1j вьфавнивая тем самым усилие захвата предмета пальцами и их перемещение .
Приложенное давление деформирует стенки камер 19-21 и, соответственно, и стенки камеры 11., примыкающие к жидкости 12, и далее по импульсной трубе 13 подается на реле 10, настроенное предварительно на определенное давление, соответствующее наибольшему усилию захвата, прикладываемому к предмету. По достижении заданного усилия захвата реле 10 ера- батывает, подавая напряжение на электромагнит 25, отключающий (закрывающий) клапан 14, прекращая подачу рабочего тела, одновременно напряжение подается на токопроводящие слои 6 и 7 в фиксирующих камерах 3, после чего между этими слоями возникает электрическое поле, в котором жидкость 5 отвердевает, фиксируя частицы рабочей среды 4.
Для расфиксации предмета напряжение отключается, жидкость 5 возвраА-А б
19
20
щается в жидкую фазу, подача рабочего тела реверсируется и пальцы захва та расходятся, отпуская предмет; а форма фиксирующих камер восстанавливается.
Формула изобретения
Захват автоматического манипулятора по авт.св. № 988550, о т л и
повьщ1ения надежности, он снабжен сегментными камерами, расположенными вокруг измерительной камеры, и регуляторами давления с управляющими входами, при ЭТОМ регуляторы давления включены между трубопроводом и соответствующей рабочей камерой, а управляющий вход каждого регулятора давления соединен с соответствующей сегментной камерой, причем рабочая среда каждой фиксирующей камеры имеет возможность взаимодействия с- ра- бочей средой измерительной камеры через соответствующие гибкие стенки сегментных камер, также заполненных рабочей средой.
6-6
2tf
19
| Захват автоматического манипулятора | 1981 |
|
SU988550A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
