(54) ШАГАЮЩИЙ ДВИЖИТЕЛЬ ТРАНСПОРТНОГО
1
Изобретение относится к конструкциям транспортных средств повышенной проходимости, а более точно к шагаюш,им машинам.
Известен движитель транспортного средства, выполненный в виде плоского лямбдообразного прямолинейно-направляющего механизма Чебышева, расположенного в вертикальной плоскости,к концу шатуна которого шарнирно прикреплена опора 1.
Недостатком этого устройства является невозможность измененияТраектории опоры движителя, что необходимо для поворота шагающего транспортного средства.
Наиболее близким к предлагаемому является шагающий движитель, содержащий плоский лямбдообразный прямолинейнонаправляющий механизм Чебышева с опорой, прикрепленной к концу шатуНа, и вoзвpatнo-пocтyпaтeльным приводом изменения расстояния между точками подвеса кривошипа и коромысла, причем механизм Чебышева расположен в вертикальной плоскости.
В этом движителе путем взаимного смещения точек подвеса кривошипа и коромысла может быть изменена длина шага. СРЕДСТВА
что необходимо для осуществления поворота 2.
Однако изменение расстояния между точками подвеса кривошипа и коромысла в механ изме Чебышева приводит к иска5 жению траектории конца шатуна. В результате прям9Лйнейный участок траектории, для получения которого и применялся данный механизм, исчезает, превращаясь в кривую линию, близкую к дуге окружности.
10 Причем эта дуга может быть обращена вниз выпуклостью или вогнутостью в зависимости от направления взаимного смещения точек подвеса коромысла и кривошипа механизма. Это приводит к вертикальным раскачиваниям корпуса шагающего транспорт15ного средства, значительно ухудщающим комфортабельность его движения при маневрировании.
Целью изобретения является устранение вертикальных колебаний корпуса транс20 портного средства при его поворотах.
Поставленная цель достигается тем, что в шагающем движителе транспортного средства, содержащем плоский лямбдообразный прямолинейно-направляющий механизм Чебыщева с опорой, прикрепленНОИ к концу шатуна, и возвратно-поступательным приводом изменения расстояния между точками подвеса кривошипа и коромысла, указанный механизм Чебышева расположен в горизонтальной плоскости, а его опора прикреплена жестко и выполнена в виде вертикально установленнотй приводной телескопической стойки.
Для прямолинейной ходьбы используется прямолинейный участок траектории, которую колец шатуна описывает при среднем расстоянии между точками кривошипа и коромысла. Для осуществления поворота точки подвеса смещаются, в результате чего траектория конца шатуна превращается в кривую, близкую к дуге окружности поворота. При этом дуга остается плоской кривой, расположенной горизонтально. Таким образом, полностью исключаются какиелибо вертикальнее колебания корпуса транспортного средства как при прямолинейной ходьбе, так и при повороте. Движение транспортного средства становится более комфортабельным и одновременно снижаются энергозатраты при ходьбе.
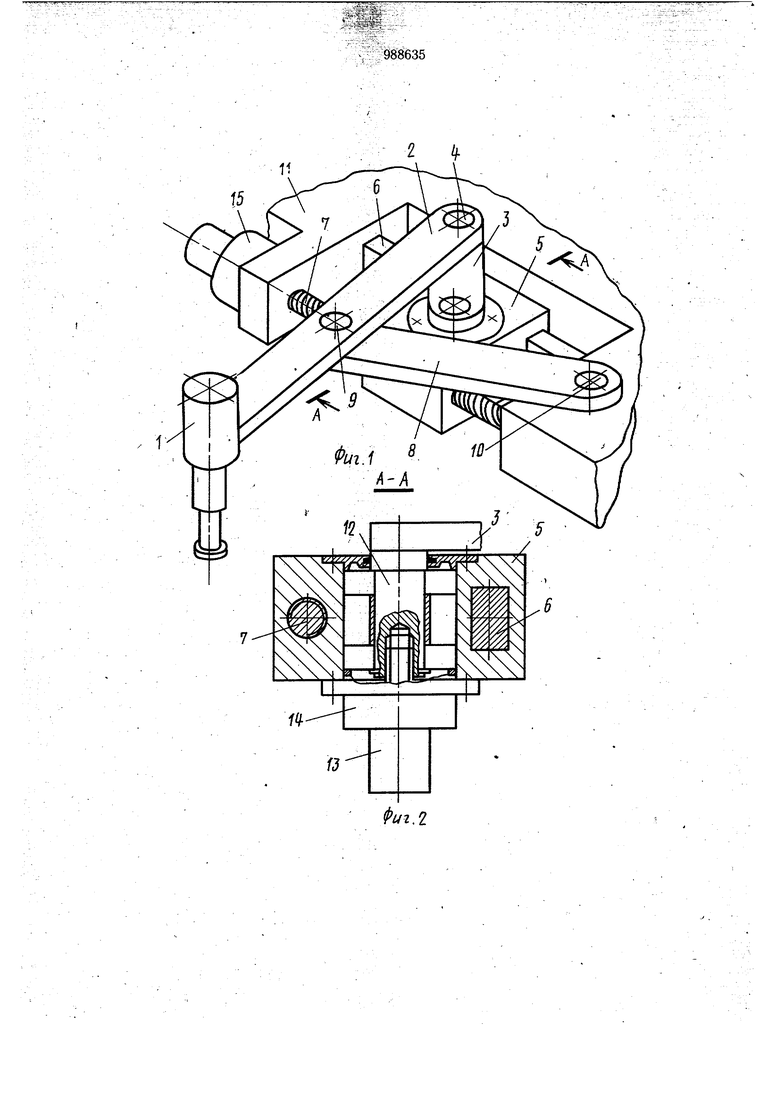
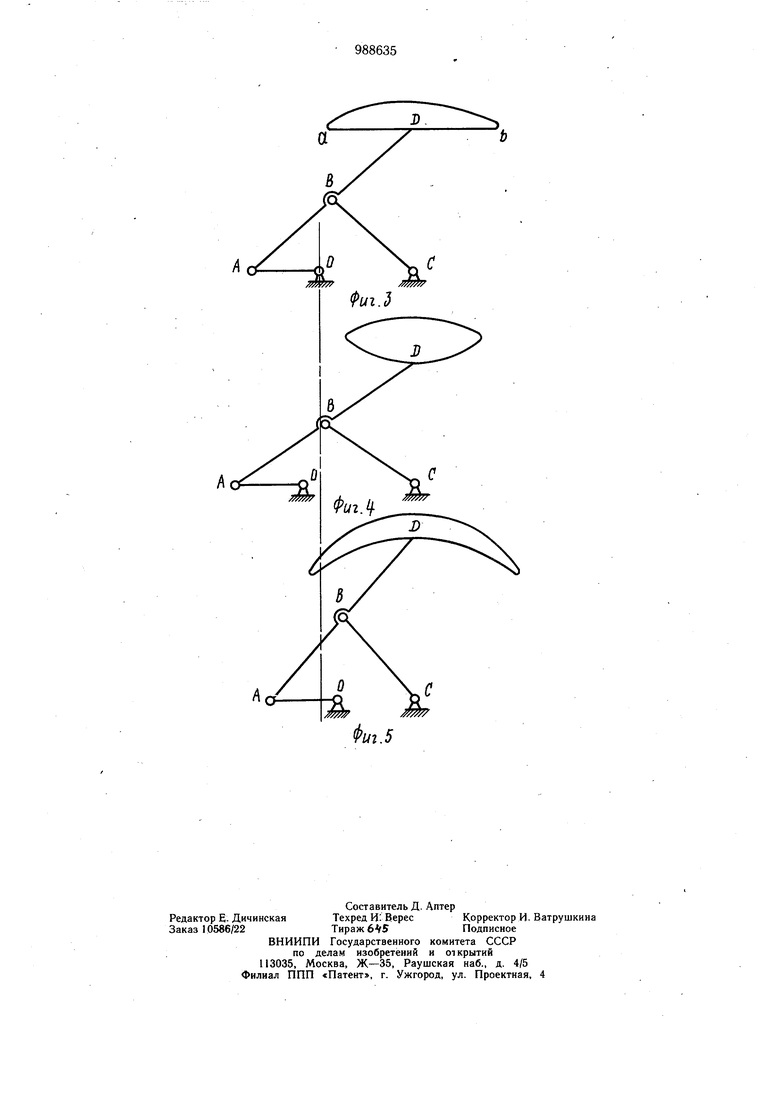
На фиг. 1 показан движитель, общий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3-5 - различные виды траекторий опорной точки тел скопической стойки.
Шагающий движитель содержит вертикально установленную приводную телескопическую стойку 1, жестко прикрепленную к шатуну 2 (привод выдвижения телескопической стойки 1 не показан). Шатун 2 связан с кривошипом 3 посредством шарнира 4. Кривошип 3 шарнирно соединен с ползуном 5, установленным подвижно на направляющей 6 и винте 7. Коромысло 8 присоединено при помощи шарниров 9 и 10 к щатуну 2 и корпусу II. Точками подвеса кривошипа 3 и коромысла 8 являются оси вала 12 и шарнира 10. Направляющая 6 установлена параллельно линии, проходящей через точки подвеса кривошипа 3 и коромысла 8. Начальное расстояние между этими точками подвеса, а также длины кривошипа 3, шатуна 2 и коромысла 8 подобраны так, что механизмы представляют собой прямолинейно-направляющий механизм Чебыщева. Двигатель 13 соединен с кривошипом 3 посредством вала 12 через редуктор 14. Реверсируемый привод 15, соединенный с винтом 7, является возвратно-поступательным приводом перемещения ползуна 5.
Устройство работает следующим образом.
При прямолинейной ходьбе кривошип 3 приводимый от двигателя 13 через редуктор 14 и вал 12, приводит в движение шатун 2 и коромысле 8. При этом конец шатуна с прикрепленной к нему стойкой 1
описывает траекторию п (фиг. 3). Эта траектория состоит из двух участков: криволинейного и приблизительно прямолинейного. Первый из ни: является участком переноса, в который стойка 1 проходит в поднятом положении. В то время, когда, механизм Чебыщева описывает второй- (прямолинейный) участок, соверщая рабочий ход, телескопическая стойка 1 стоит на земле, опущенная ее приводом. Подъем и опус.J кание стойки 1 в местах изменения направления движения конца шатуна 2,происходит автоматически при поступлении сигналов от командно-временного устройства (не показано).
При необходимости совершить поворот
водитель включает привод 15, вращение от которого передается винту 7. Винт 7 перемещает ползун 5 по направляющей .6 корпуса 11. В результате-изменения расстояния между осями щарнира 10 и вала 12
механизм горизонтального привода перестраивается и участок его рабочего хода искривляется (фиг. 4 и 5), что приводит к повороту корпуса транспортного средства без изменения его высоты под опорной поверхностью.
5 Применение изобретения позволяет осуществлять поворот шагающего транспортного средства без каких-либо вертикальных колебаний корпуса и, тем самым, повысить комфортабельность движения. Кроме того,
отсутствие вертикальных колебаний корпуса снижает инерционные нагрузки, что повышает надежность и долговечность и уменьшает энергозатраты.
Формула изобретения
Шагающий движитель транспортного средства, содержащий плоский лямбдообразный прямолинейно-направляющий механизм Чебышева с опорой, прикрепленной
к концу щатуна, и, возвратно-поступательным приводом изменения расстояния между точками подвеса кривощипа и коромысла, отличающийся тем, что, с целью устранения вертикальных колебаний корпуса транспортного средства при его поворотах, указанный механизм Чебыщева расположен в горизонтальной плоскости, а его опора прикреплена жестко и выполнена в виде вертикально установленной приводной телескопической стойки.
Источники информации,
принятые во внимание при экспертизе
1.Патент ФРГ № 1144599, кл. 63 с 81, 1963.
2.Авторское свидетельство СССР
№ 564205, кл. В 62 D 57/02, 1977 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Шагающий движитель транспортного средства | 1988 |
|
SU1625757A1 |
| ШАГАЮЩИЙ ДВИЖИТЕЛЬ ТРАНСПОРТНОГО СРЕДСТВА | 1988 |
|
RU1519099C |
| ШАГАЮЩИЙ ДВИЖИТЕЛЬ | 1991 |
|
RU2009936C1 |
| ШАГАЮЩАЯ ОПОРА | 1992 |
|
RU2067941C1 |
| Механизм шагающего движителя | 2019 |
|
RU2723923C1 |
| Транспортное средство, в котором допускается возможность перевода движителя из дорожной конфигурации во внедорожную и наоборот | 2018 |
|
RU2734175C2 |
| Прямолинейно-направляющий механизм | 1990 |
|
SU1820099A1 |
| ШАГАЮЩИЙ МЕХАНИЗМ | 2021 |
|
RU2801819C2 |
| РЫЧАЖНЫЙ ПРЯМОЛИНЕЙНО НАПРАВЛЯЮЩИЙ МЕХАНИЗМ НОГИ ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2402450C2 |
| ПРЯМОЛИНЕЙНО-НАПРАВЛЯЮЩИЙ МЕХАНИЗМ | 1991 |
|
RU2006725C1 |