(54) УСТРОЙСТВО ДЛЯ ЗАХВАТА И ВРАИШНИЯ КРУПНОГАБАРИТНЫХ ИЗДЕЛИЙ ПРИ ТЕРМООБРАБОТКЕ Изобретение относится к термической обработке крупногабаритных идделий, например, роторов турбогенераторов, турбин, длинномерных труб, и может ймт использовано на заводах тяжелого и транспортного, энергетического машиностроения. Известен также автоматический захват, для изделий с фигурным штырем, содержащий корпус, профилированные рычаги, освобождающий и удерзютвающий ме ханизмы, причем удерживающий механизм Бьшолнен в виде подвижного стакана, воздействующего на рычаги с помощью подвижных стержней, проходтцдх через вертикальные отверстия, вьшолнешпле в корпусе Cl 3 Недостатком этого является то, что он не может быть применен для захва та крупногабаритных и тяжелых изделий, так как рычаги, на которых зависает взделяе во время транспортировки, могут не выдержать большого веса иэдепия, Кроме, того, этот захват не может быть нспользсжан для вращения обрабатываемо го изделия. Наиболее близким к решению по технической сущности в достигаемому эф фекту является устройство для вращения крупногабаритных vtanenssit при т моо&работке, содержащее корпус, червяк с приводом и червячную шестерню с поверяюстью, на котсфую буртом оперт-прсигущевный сквозь червйчную шестерню якорь, несущий приспособление для крепления изделия, причем,опорные поверхности бурта и,червячной шео теряй выполнены сферическими. Конструкция этого устройства позволяет уменьшить коробление изделия при вращении путем улучшения его центрирования 12 . Недостатком устройства япвляется onvсутствие овтоматическогю захвата обра тываемого изделия. Кроме того, якорь, к которому подвешивается обрабатываемое изделие, часто выходит из . строя иэ-за высоких температур, а для его замены необходима полная разборка
узла захвата устройства, что влечет за собой дополнительные затраты времени.
Цель. изобретения - повышение недеябности и упрощение конструкции,
Т1оставлвнная цель достигается тем, что устройство для захвата и вращения крупногаба{ ггных изделий при термооб работке, содержащее корпус с тягами, цшггратор, прийод вращения и штангу, снабжено 1 лачхами и упорами с подпружиненнь ет фиксаторами, установленными в центраторе, при этом кулачки выивлиены с возможностью продольного и поперечного перемещения относительно центратора, а штанга расположена в центраторе по его оси
Кроме того, рабочие поверхности кулачков и центратора вьшолнены наклоннььми.
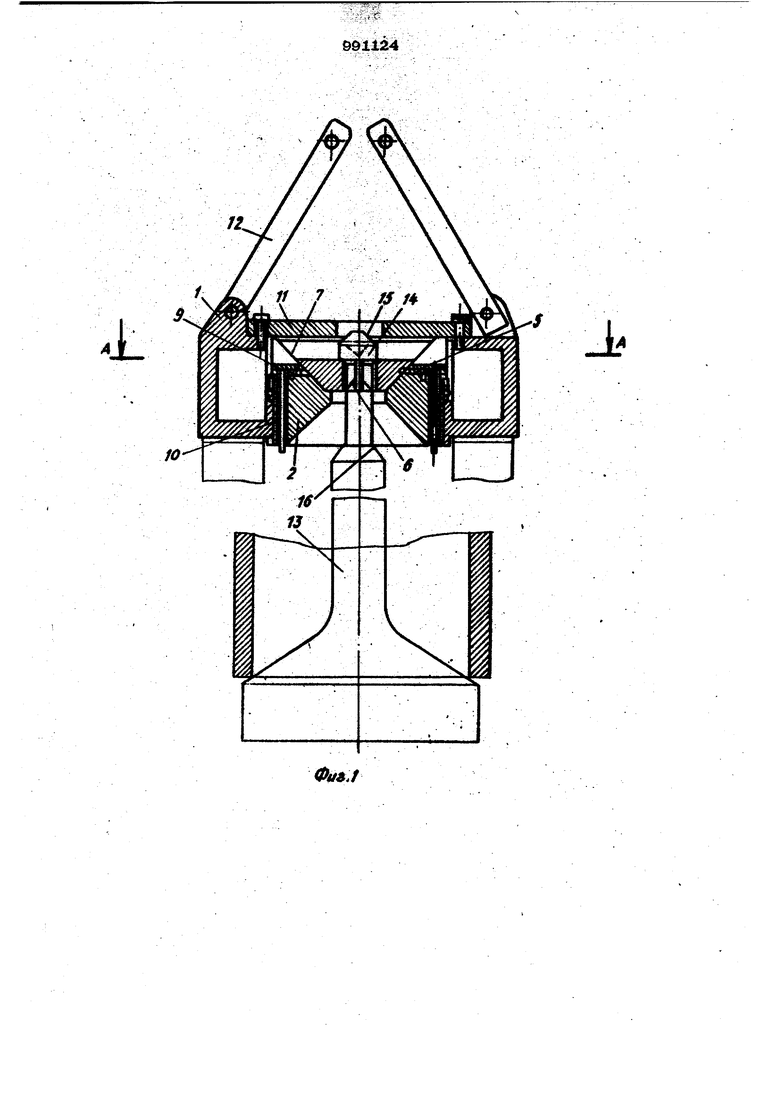
На фиг. 1 изображен общий видус ройства, разрез по оси; на фиг. 2 « раэреэ А-А на фиг, 1.
Устройство для захвата и вращения крупногабаритны изделий при термообработке содержит корпус 1, в котором расположены центратор 2 и червячная пара 3, Электромеханический привод 4 установлен на корпусе 1, На цет траторе 2 расположены кулачки 5, имеющие скосы 6 и 7, две боковины 3, служащие для направления.кулачков 5, два иксатора 9 и два упора 10, Корпус 4 снабжен крышкой 11 -и тягами 12, имеющ ми свободные верхние концы для соединения с крюком подъемного крана. На съемной штанге 13 в верхней частит расположена фигурная головка 14 с конической поверхностью 15. Ниже головки
14расположена коническая поверХ ность 16,
Устройство работает следующим образом.
При опускании устройства на штангу 13, которая .находится в сборе с офабатыпаемым изделием, штанга входит в центратор 2 и конической поверхностью
15головки 14 давит на скосы 6 кулач ков 5, которые поднимаются вверх и расходятся в стороны, скользя скосами 7 по сопряженным с ними поверхностям центратора 2 до тех пор, пока головка 14 штанги 13 не пройдет через кулачки 5. При этом фиксаторы 9 не вступят в работу, так как кулачки не выйдут за уровень расположения фиксаторов. После
этого кулачки 5 под действием собственного веса опускаются в исходное положе кие, а игганга 13 головкой 14 устана&ливпется на кулачки 5. Таким образом.
происходит захват штанги с устаяовле ным на ней обрабатываемым изделием. При скольжении кулачков 5 и вниз боковины 8 служат для них направляк шими, -Устройство вводят в зону обработки и включают элвв громеханичес1шй привод 4, который через червячную пару 3 приводит во вращение центратор 2,
Для отсоединения С1 емной штанги 13 устройство при помощи подъемного крана опускают. При этом коническая повврхгность 16 штанги 13 давит на скосы в. кулачков 5, вследствие чего кулачки 5 расходятся в разные стороны и поднимаются вверх до ухюра в крышку 11. При 9ТОМ фиксаторы 9 освобождаются и шксируют кулачки 5 в крайнем верхнем положении. Таким образом съемная штанга 13 отделяется от устройства.
Для вращения кулачков 5 в исходное положение достаточно поставить yciw ройство на плоскость. При этом упоры 10, поднимаясь вверх, отводят фиксаторы 9 в исходное положение, ос&обоу дая таким образом кулачки 5, которые под действием собственного веса опускаются в исходное положение. Цикл закончен.
Предлагаемое устройство дает возможность выполнять две операции, автоматический захват и вращение его во время обработки.
Формула изобретения
1. Устройство для захвата и вращени 1фупногабаритных изделий при термообработке, содержащее корпус с тягами, центратор, привод вращения и штангу, отл.нчающееся тем, что, с целью повышения надежности и упрош&ния конструкции, устройство снабжено кулачками в упорами с подпружиненными фиксаторами, установленными в центра торе при этом кулачки вьшолнены с возможностью продольного и поперечного перемещения относительно центратора, а штанга расположена в центраторе по его оси.
. 2, Устройство по, П.1, отличающееся тем, что рабочие поверхности кулачков и центратора выполнены наклонными.
Источники информации,
принятые во внимание при экспертизе
1.Авт чх;кое свидетельство СССР № 396297, кл. В 66 С 1/62, 1970.
2.Авторское свидетельство СССР № 582307, кл,Р 27 D З/ОО, 1976,
/z
L
СЙ/Л/
j
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для захвата и вращения крупногабаритных изделий при термообработке | 1981 |
|
SU1040309A1 |
| Устройство для удержания крупногабаритных изделий при термообработке | 1984 |
|
SU1162731A1 |
| Сверлильный станок | 1985 |
|
SU1355369A1 |
| ТЕРМОСТОЙКИЙ ПАКЕР | 2002 |
|
RU2267003C2 |
| Устройство для свинчивания и развинчивания буровых штанг | 1977 |
|
SU720145A1 |
| Многопозиционный сверлильный автомат | 1978 |
|
SU774819A1 |
| Захватное устройство для грузов с фигурной головкой | 1977 |
|
SU727553A1 |
| Захват для изделий с отверстием | 1986 |
|
SU1373673A1 |
| Автоматический захват для транспортировки тепловыделяющих сборок ядерных реакторов | 1972 |
|
SU415947A1 |
| УСТРОЙСТВО ДЛЯ ИЗВЛЕЧЕНИЯ ТЕХНОЛОГИЧЕСКОГО КАНАЛА ИЗ ЯДЕРНОГО РЕАКТОРА | 1988 |
|
SU1669313A1 |