(54) УСТТОЙСТВО ДЛЯ ПРОГРАММНОГО УПРАВЛЕНИЯ СТАНКОМ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для числового программного управления станками | 1985 |
|
SU1291928A1 |
| Программное задающее устройство | 1981 |
|
SU991376A1 |
| Устройство для программного управления | 1985 |
|
SU1280571A1 |
| Устройство для программного управления | 1981 |
|
SU976428A1 |
| Устройство для программного управления | 1984 |
|
SU1255993A1 |
| Устройство для программного управления позиционного типа | 1983 |
|
SU1158976A1 |
| Программное устройство для поддержания постоянства скорости резания | 1984 |
|
SU1211696A1 |
| Устройство для задания циклов в системах числового программного управления | 1989 |
|
SU1619233A1 |
| Устройство для коррекции положения резца на станке с программным управлением | 1981 |
|
SU983651A1 |
| Устройство для программного управления | 1984 |
|
SU1193643A1 |
I
Изобр тение очосится к области автоматики и вычислительной техники и может быть использовано в системах числового программного управления металлорежущими станками и другими видами технологического оборудования.
Известно устройство для автоматического разгона и торможения, состоящее из последовательно соединенных генератора тактовых импульсов, делителя частоты, накопителя, управляемого счетчика, реверсивного счетчика и блока вентилей, вторая группа входов которых присоединена к выходам делителей частоты {1.
К недостаткам этого устройства относятся изменение ускорений и превышение максимальных величин ускорений разгонов торможения в случае использования коррекции скорости подачи с помощью изменения частоты ГТИ, невозможность автоматического включения различных величин коррек1Ц1Й скоростей подач на различных участках программы.
Известно также устройство для разгона и торможения исполнительного двигателя станка, содержащее последовательно соединенные суммирующий счетчик, блок управления, ревсрсивный счетчик и блок ключей, uxowj которого подключены к выходам связанных между собой генератора импульсов и делителя частоты, и последовательно соединенные генератор опорных импульсов и блок вычисления, вход которого подключен к выходу делителя частоты, а выход - к входу суммирующего счетчика. Это устройство обеспечивает автоматическую стабилизавдю ускорений, т. е. превышение ими максимально допустимого уровня 2,
10
Наиболее близким техническим решением к изобретению является устройство для управления подачей, содержащее блок задания программы, подключенный через реверсивный счетчик к индикатору и логическому блоку, соединенному
15с блоком выбора частот и через коммутатор с шаговым двигателем 3).
Недостатком зтого устройства является низкая точность работы.
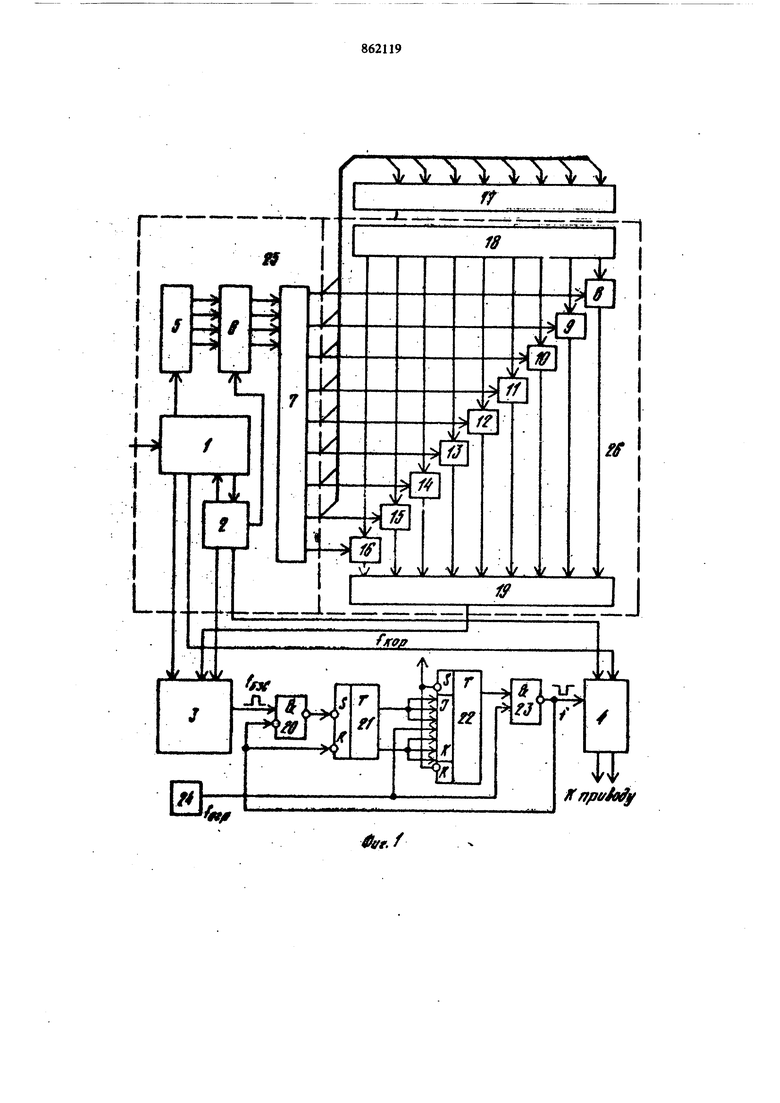
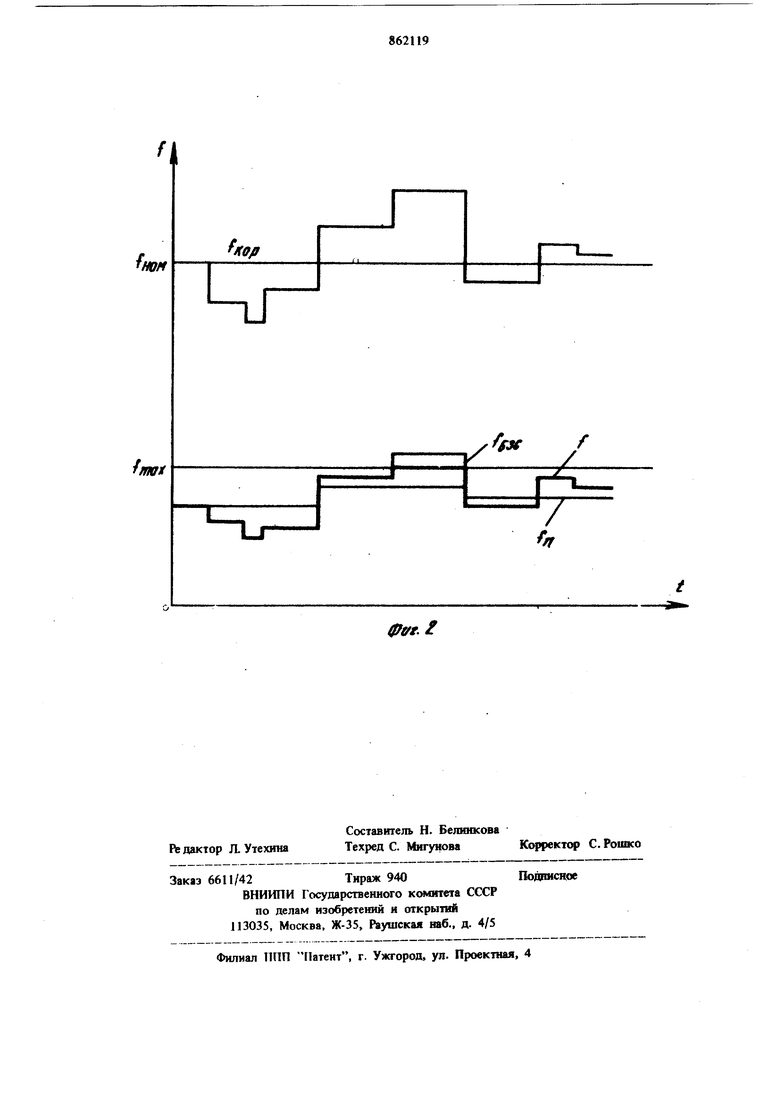
Целью изобретения является расширение об20ласти применения устройства за счет обеспече- НИН автоматического введения различных по величине коррекций скоростей подачи или оборотов шпинделя и повьппение точности работы за счег автоматического исключения превышення выходной частотой задающего устройства- максимальной частоты, воспринимаемой приводом. казаннак цель достигается тем, что в устройство для программного управления станком, содержащее последовательно соединенные бло задания информации, блок выбора частоты по.дачи и блок задания скорости, причем соответствующие вьгходы блока задания информации соединены с вторыми входами блока задания скорости, с первыми входами блока управления введены генератор частоты ограничения и последовательно соединенные первый злемеит И-НЕ, RS-Tfeurep, Э К-триггер и второй элемент И-НЕ выход которого подключен к второму входу блока управления, к R-входу RS-триггера и к первому входу первого элемента И-НЕ, соединенного вторым входом с выходом блока задания скорости, а выход генератора частоты ограничения подключен к второму вхо2 второго злемента И-НЕ и к синхронизирующему вхо ду ЭК-триггера. На фиг. 1 изображена структурная схема устройства; на фиг. 2 - график изменения частоты на входе блока управления. Устройство содержт узел 1 ввода програмьш, узел 2 цеэтральнси-о упршления, блок 3 задают скорости, блок 4 уярааяеиия, регистры 5 и 6, дещифратор 7, клюта 9-16, блок 17 шо осации, узел 18 генераторов, злемент И 19, первый элемент 20 И-НЕ, RS-триггер l.KТ1жггер 22, второй элемент 23 И-НЕ , генерат 4 24 частоты ограничения, блок 25 задаюш {щформаода и блок 26 выбора частоты подачи. На фиг. 2 обозначены ,,.- максимальная частота, воспринимаемая блоком 4, например иитертолятором или приводом, foff /2, т, е. равна половинной частоте генератора 24, - номинальная частота любого из генераторов узла 18 при коэффициенте коррекции скорости, равном 1, т. е. точно равная частота кварцевого генератора узла 18; f частота на входе блока 3, -изменяемая в результате к рекций частот узла 18; f - программно задаш{ая частота на входе блеяла 4; f - частота на выходе злемента Й-НЕ 23; fgi, -частота на выходе блока 3. Устройство работает следующим образом. Информация управляющей программ поагунает на вход узла 1, а котором ош дешифри руется и распределяется по всбм другим блокам устройства следуюцщм образом. Информация о режимах работы поступает в узел 2, код скорости передается в блок 3, и геометрическая информация заносится в блок 4. Номер коррекции скорости заносится в регистр 5, являю щийся регистром промежуточной памяти. Узел 7. синхронизирует работу всех бл(жов устройства. При отработке очередного кадра программы номер коррекции по команде, поступающей jc выхода узла 2, переписывается в регистр 6 (регистр рабочей памяти номера коррекции). Код номера коррекции с выхода регистра 6 поступает на входы деишфратора 7. При этом на выходе децшфратора 7, соответствующем коду номера коррекцин, появляется сиграл, открьгаающий один из ключей 8-15. Сигналы открьпающие ключи 8-15, поступают также на входы блока 17 и включают лампо а у, индицирующую орган регулирования того генератора, выход которого через один из ключей 8-15 в зто время подключен к элементу 19. Таким образом, оператор всегда знает, какую ручку он должен повернуть в каждый текущий момент времени для оперативного вмещательства в программу. Выход дещифратора 7, управляющнй ключом 16, не имеет связи с блоком 17, так как на второй вход ключа 16 подается с выхода узла 18 частота кварцевого генератора, которая является эталонной, соответствующей коррекцни О и, следовательно, нерегулируемой. Если все лампочки на пульте оператора погащены, это означает, что устройство работает в этот момент от эталонной частоты н вмещательство оператора в этот момент невозможно. С выхода элемента И 19 частота fnop поступает на вход блока 3, где из нее в соответствии с заданным программой кодом формируется частота задания подачи f gg . Положительный импульс этой частоты с выхода блока 3 поступает на вход элемента И-НЕ 20, на втором входе которого в это время имеется положительный потенциал с выхода элемента И-НЕ 23, поэтому элемент И-НЕ 20 срабатывает н устанавливает в 1 RS-трнггер 21. При этом с выхода RS-триггера 21 на входЗ триггера 22 поступает .единичный сигнал, на вход К - нулевой. Поэтом;, первый же нмпульс частоты forp. с выхода генератора 24, поступающий на синхровходЗ К-триггера 22, установит его в единичное состояние по своему заднему фронту. Этот импульс через элемент И-НЕ 23 не пройдет, так как благодаря задержке в D К-триггере 22 к моывнту окончания действия этого импульса на входе элемента И-НЕ разрещающий потенциал на другом его входе еще не появляется. Следующий импульс генератора 24 пройдет через элемент И-НЕ 23 и поступит, на вход блока 4, например интерполятора, в качестве импульса частоты, задающей скорость управления. Этот же импульс возвращает в HyiKBoe состоянике RSтриггер 21 и является сигналом Запрет для злемента И-НЕ 20. Таким образом, на каждый импульс с выхода блока 3, поступающий на вход злемента 20, на вход блока 4 с выхода элемента 23 будет поступать один импульс. Т. е. на вход блока 4 будет поступать выходная частота fg блока 3. Положение изменится, когда выходная частота блока 3 превысит половинную 58 частоту генератора 24, «гго может случиться (см. фиг. 2), когда на некотором участке программы задана скорость, близкая к максимальной, а оператор откорректировал частоту гечератора узла 18 в большую сторону. Тогда за два периода выходной частоты генератора 24 на вход злемента И-НЕ 20 поступит несколько импульсов, которые, поступая на единичный вход RS-триггера 21, только подтвердят его единичное состояние, а частота на выходе зжмента И-НЕ 23 будет равна половинной частоте генератора 24 Эта половинная частота выбирается равной максимальной частоте, воспрннимаемой блоком 4 VatKO поэтому несмотря на произвольное использование коррекции скоростей оператс гам в настоящем устройстве потери информации и связанные с этим искажения траектории в блоке 4 не будут иметь места. Действительно, несмотря на превышение частотой f . значения д,,частота f на выходе блока 4 нигде ее не превышает. , Таким образом, предлагаемое устройство обеспечивает возмочсность широкого использовани разнонаправленных (в плюс или минус) коррекЩ1Й скоростей на различных этапах отработки программы с вводом их непосредствеино во время обработки детатш; позволяет исключить потери путевой информации в случае выхода отк(ректированной частшы за пределы возмож ностей управжиия перемещением 4. Это позволяет значительно сократить цикл отладки программы обработки детали, особенно на токарных станках, так как в новых нротраммах дяя этих станков 80% ошибок составляют ошиб ки выбора режимов, а пе геомет1ти. Кроме того снижается брак из-за непредвиденных искажений jpaeKToptai- обработки, вызва1е( потерей путевой информации из-за превьпцення ма снмальных скоростей. Формула изобретения Устройство для программного управления станком, содержащее последователыю соединенные блок задания информации, блок выбора частоты подачи и блок задания скорости, причем соответствующие выходы блока задания информации соединены с вторыми входами блока задания скорости и с первыми входами блока управления, отличающееся тем, что, с целью повьппения точности работы и расширения области примеиения устройства, в него введены генератор частоты ограиичення и последовательно соединенные первый злемеит И-НЕ, RS-трнггер, 3 К-триггер и BTOpdi элемент И-НЕ, выход которого подключен ко второму входу блсжа управления. К R-входу RS-триггера и к первому входу первого элемента И-НЕ, соединенного вторым входом с выходом блока задания скорости, а выход генератора частоты огршичення подключен к второму входу второго элемента И-НЕ и к сннхроиизи{ тцему входу Э К-триггера. Источники информадии, 1финятые во внимапле при экспертизе 1.Сб. Способы подготстки программ и интерполят( для ксипурных систем чнслового управлешш стазлкит. М., Машиностроение, 1970, с. 96. 2.Автсфекое свидетельство СССР N 506001, кл. G 05 В 19/18, 1973. 3.Авторское свидетельство СССР N 363996, кл. G 05 В 19/18, 1971 (прототип). 1, 4w w w V V V у // И/ n v N/ /Л/ V f. f f51
iJ
f/aof
/f /
(fffft. /
