Изобретение относится к области ; автоматик г и вычислительной техники и может быть использовано ,цля управления фрезерными станками и другими видами технологического оборудования, где необходимо осуществлять коррекцию эквидистанты.
Целью изобретения Ч является расширение функциональных возможностей системы.
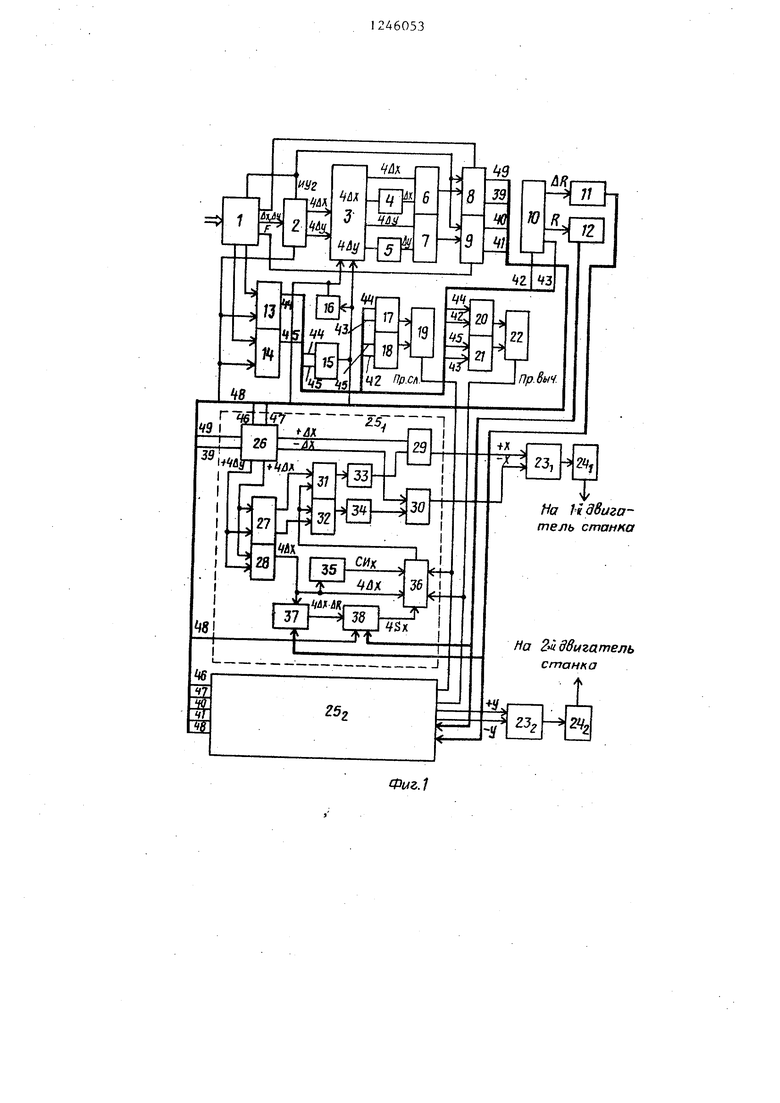
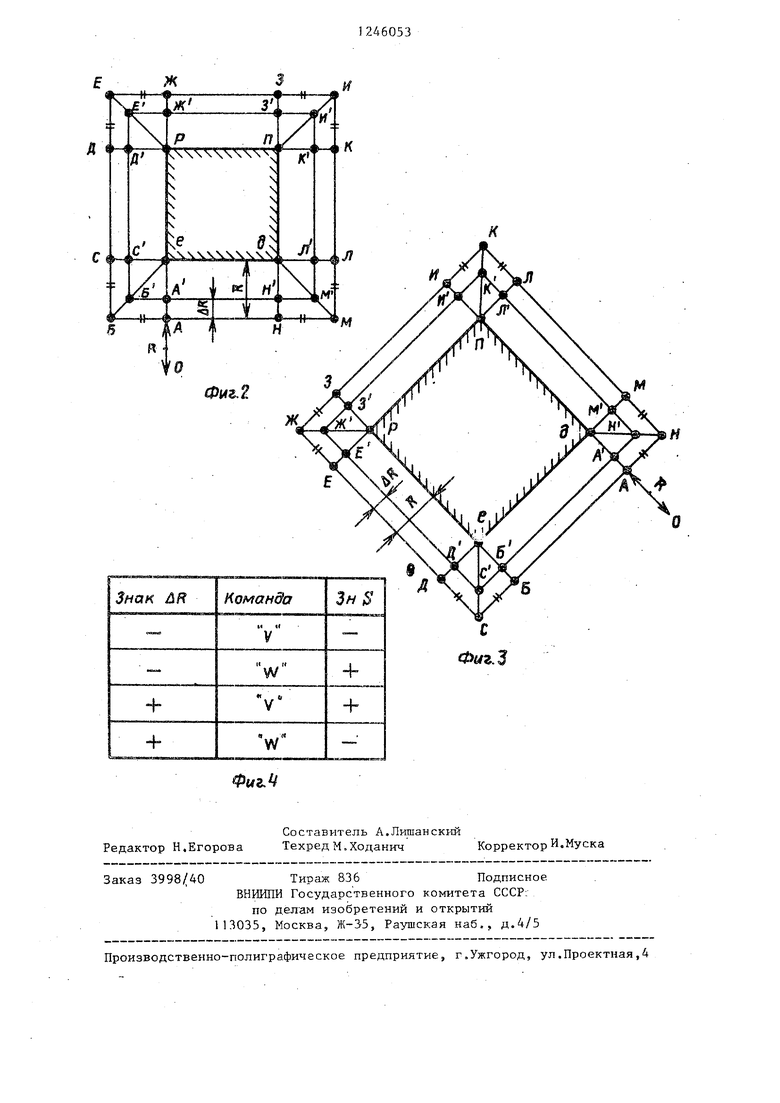
На фиг, I представлена блок-схема системы для программного управления; на фиг. 2 - схема обработки детали прямоугольной формы и выхода инстру- мента на траекторию; на фиг, 3 - схема обработки детали в форме квадрата (повернутого) и выхода инструмента на траекторию; на фиг, 4 - таблица определения знака, используемого при расчете величин корректировок,
Система (фиг.1) содержит блок 1 ввода программы, интерполятор 2, первый 3 коммутатор,.первый 4 и вто- рой 5 делители частоты, первый 6 и йторой 7 элементы ИЛИ, первый 8 и второй 9 блоки определения знака перемещения пульт 10 коррекции, первый регистр 11 (регистр величины коррекции радиуса фрезы), второй регистр 12 (регистр величины радиуса фрезы), первый 13 и второй 14 R - S-тригге- ры, третий элемент ИЛИ 15, элемент НЕ 16, первый 17 и второй 18 элементы И, четвертый элемент ИЛИ 19, третий 20 и четвертый 21 элементы И, пятый элемент ИЛИ 22, блоки 23,2 управления приводами (соответственно по каналам X и V), приводы 24 исполнительного двигателя, устройства 25,2 коррекции программ. Каждое устройство коррекции программ (фиг,1) состоит из второго коммутатора 26, третьего R - S-триггера 27, шестого 28, седьмого 29 и восьмого 30 элементов ИЛИ, пятого 31 и шестого 32 элементов И, третьего 33 и четвертого 34 делителя частоты, формирователя 35 синхроимпульсов, сумматора 36, блока 37 умножения, блока 38 деления. Линии 39 - 49 - межблочные связи системы.
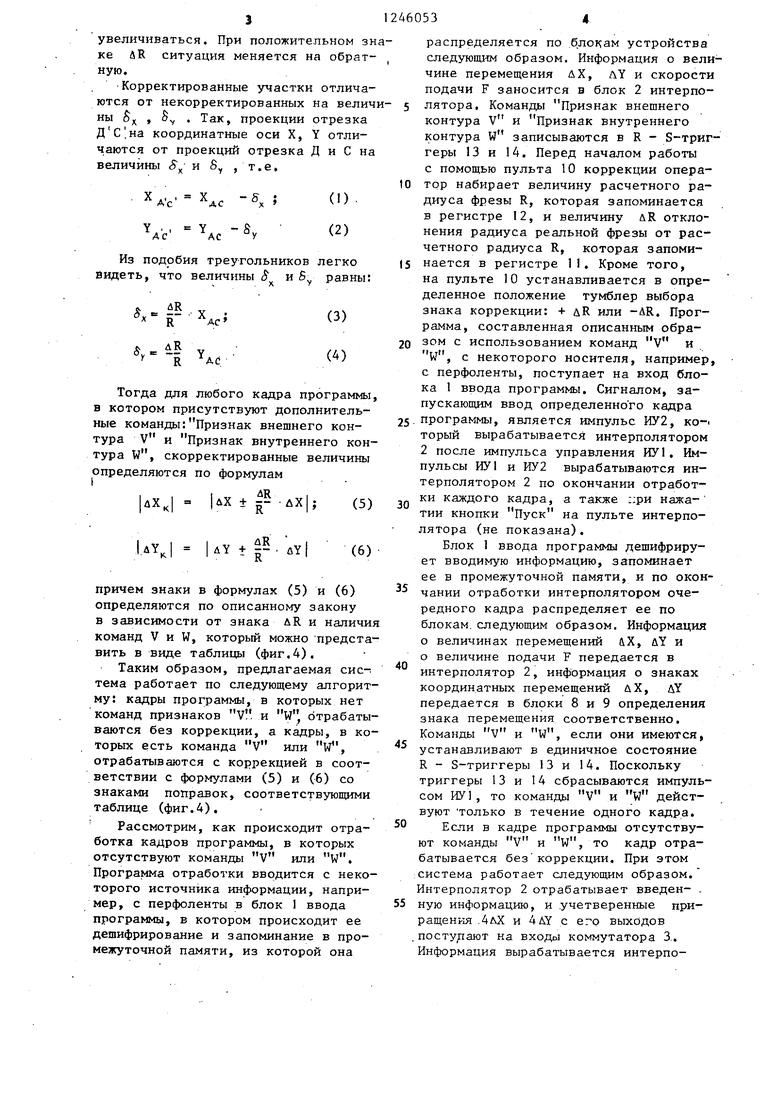
Система работает следующим образом. Программа обработки детали представляет собой траекторию движения центра фрезы (фиг,2) из нулевой точки О к первой точке А, лежащей на эквидистантном контуре,.удаленном от обрабатываемой поверхности дета
5
ли на величину радиуса фрезы R, i, обход по этому контуру АБЕИМК в любом направлении С последующим воэвра- щением в точку О, Для того чтобы устройство могло работать и корректировать эквидистантный контур, необходимо траекторию разбить на кадры программы следующим образом: ОА, АБ, БС, СД, ДЕ, ЕЖ, ЖЗ, ЗИ, ИК, КЛ, ЛМ, МН,, НА, АО, В кадре ОА программы, кроме основной информации, задается команда Признак внутреннего контура W, в кадре АБ, кроме основной информации, команда Признак внешнего контура V,
кадре БС - команда V , в кадре СД дополнительные команды отсутствуют, в кадре ДЕ - команда V, в кадре ЕЖ команда , в кадре ЖЗ дОполнитель-: ные команды отсутствуют, в кадре 0 ЗИ и ИК задается команда V, в кадре КЛ дополнительные команды отсутст-; вуют, в кадрах ЛМ и МН - команда V, в кадре НА дополнительные команды отсутствуют, в кадре АО задается ко 5 -манда W,
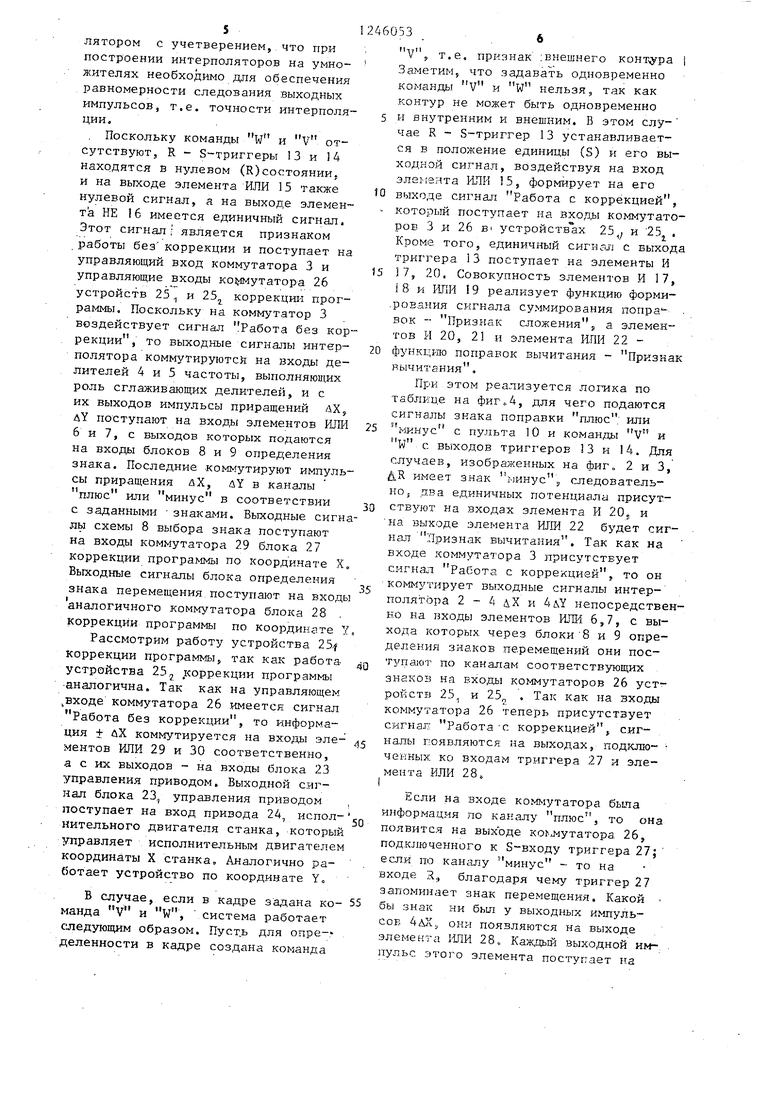
На фиг, 2 и 3 участки (кадры) . траектории, где задана команда W,, обозначены одной черточкой, а участки (кадры) траектории, где задана 0 команда V - двумя черточками. При таком разбиении траектории движения инструмента в случае, если использу- ется фреза, не радиуса R, а радиуса R - лЯ, она двигается по траектории 5 обозначенной буквами со штрихами, т.е. дая фиг, 2 ОАБ с Д Е Ж З И к Л М Н А о Эта траектория также является эквидистантной к контуру детали, но отстоящей от него на величи- 0 ну .R - uR, Следовательно, необходимо так скорректировать исходную траекторию, отстоящую от контура детали на величину uR, чтобы она превратилась в траекторию,.отстоя- 5 Щую О Т контура детали на величину R - uR, причем начальной и конечной точкой скорректированной и не скорректированной траекторией должна быть точка О,
Из фиг, 2 и 3 видно, что для получения скорректированной траектории необходимо скорректировать только те кадры, которые отмечены одной или двумя черточками: при знаке &R -г
минус и признаке внешнего контура модуль перемещения должен уменьшаться, при знаке дН - минус и признаке внутреннего контура увеличиваться. При положительном зна ке йК ситуация меняется на обратную.
Корректированные участки отличаются от некорректированных на величи ны S , S . Так, проекции отрезка Д С на координатные оси X, Y отличаются от проекций отрезка Д и С на величины 5 и S , т. е,
Хдс -S, Y -5„
АС
(1)
(2)
Из подобия треугольников легко Видеть, что величины 5 и б равны:
dR R
дК
i- Y
R Vd
(3)
(А)
Тогда для любого кадра программы, в котором присутствуют дополнительные команды: Признак внешнего контура V и признак внутреннего контура W, скорректированные величины определяются по формулам
дх,
|.х . |5
ЛХ
4Y.
AY
t|5..Y|
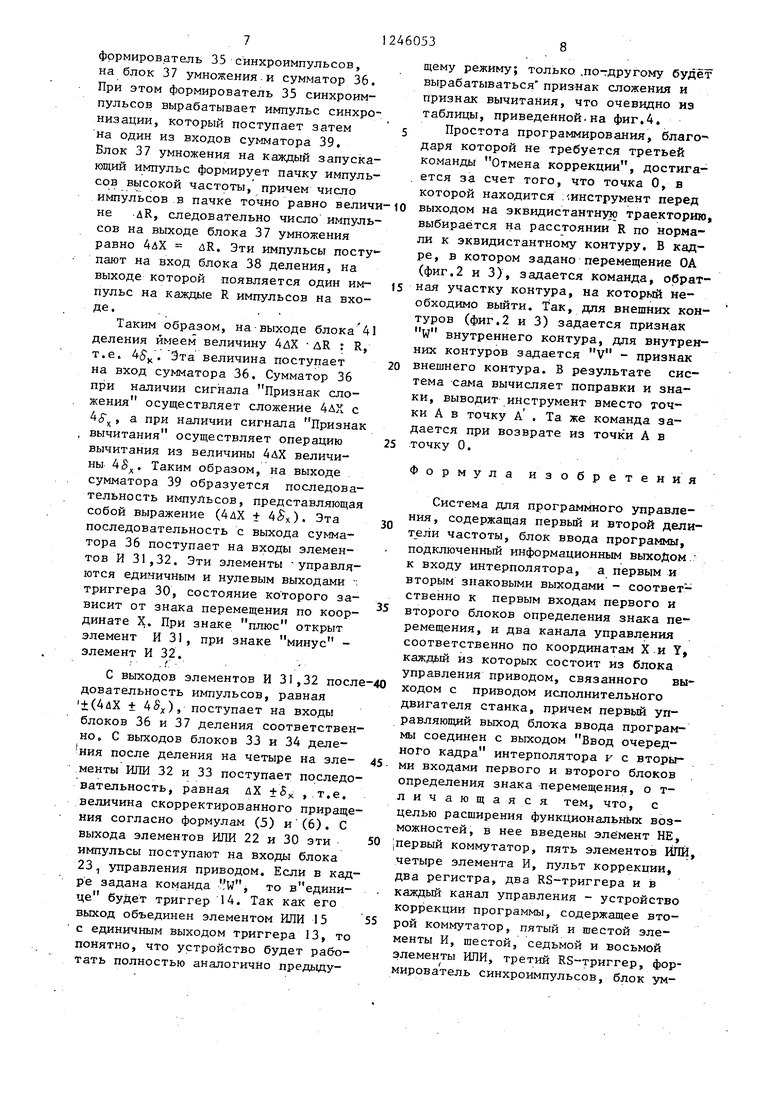
причем знаки в формулах (5) и (6) определяются по описанному закону в зависимости от знака uR и наличия команд V и W, который можно представить в виде таблицы (фиг.4).
Таким образом, предлагаемая сие-; тема работает по следующему алгоритму: кадры программы, в которых нет команд признаков и W, отрабатываются без коррекции, а кадры, в которых есть команда V или W, отрабатываются с коррекцией в соответствии с формулами (5) и (6) со знаками поправок, соответствующими таблице (фиг.4).
Рассмотрим, как происходит отработка кадров программы, в которых отсутствуют команды V или W. Программа отработки вводится с некоторого источника информации, например, с перфоленты в блок 1 ввода программы, в котором происходит ее дешифрирование и запоминание в промежуточной памяти, из которой она
распределяется по б,локам устройства следующим образом. Информация о величине перемещения ДХ, AY и скорости подачи F заносится в блок 2 интерпо- - 5 лятора. Команды Признак внешнего контура V и Признак внутреннего контура W записываются в R - S-триг- геры 13 и 14. Перед началом работы с помощью пульта 10 коррекции опера10 тор набирает величину расчетного радиуса фрезы R, которая запоминается в регистре 12, и величину AR отклонения радиуса реальной фрезы от расчетного радиуса R, которая запоми15 нается в регистре 11. Кроме того, на пульте 10 устанавливается в определенное положение тумблер выбора знака коррекции: + uR или -AR. Программа, составленная описанным обра20 зом с использованием команд V и W, с некоторого носителя, например, с перфоленты, поступает на вход блока 1 ввода программы. Сигналом, запускающим ввод определенного кадра
25. программы, является импульс ИУ2, ко-t торый вырабатывается интерполятором 2 после импульса управления ИУ1. Импульсы ИУ1 и ИУ2 вырабатываются интерполятором 2 по окончании отработки каждого кадра, а также :;ри нажа- тии кнопки Пуск на пульте интерполятора (не показана).
Блок 1 ввода программы дешифрирует вводимую информацию, запоминает ее в промежуточной памяти, и по окон чании отработки интерполятором очередного кадра распределяет ее по блокам.следующим образом. Информация о величинах перемещений йХ, uY и о величине подачи F передается в интерполятор 2, информация о знаках координатных перемещений дХ, ДУ передается в блоки 8 и 9 определения знака перемещения соответственно.
40
Команды V и W , если они имеются,
устанавливают в единичное состояние R - S-триггеры 13 и 14. Поскольку триггеры 13 и 14 сбрасываются импульсом ИУ1, то команды V и W действуют ТОЛЬКО в течение одного кадра.
Если в кадре программы отсутствуют команды V и W, то кадр отрабатывается без коррекции. При этом система работает следующим образом. Интерполятор 2 отрабатывает введен- ную информацию, и учетверенные при- ращенкя .4АХ и 4ЛУ с его выходов поступают на входы коммутатора 3.. Информация вырабатывается интерполятором с учетверением,.что при построении интерполяторов на умно- жителях необходимо для обеспечения равномерности следования выходных импульсов, т.е. точности интерполяции,
. Поскольку команды W и V отсутствуют, R - S-триггеры 13 и 14 находятся в нулевом (R)состоянии. и на выходе элемента ИЛИ 15 также нулевой сигнал, а на выходе элемента НЕ 16 имеется единичный сигнал, Этот сигнал; является признаком работы без коррекции и поступает на управляющий вход коммутатора 3 и управляющие входы ко 11мутатора 26 устройств 25 и 25j коррекцш- прог- рагфйь Поскольку на коммутатор 3 воздействует сигнал Работа без кор- рекции, то выходные сигналы интерполятора коммутируютсй на ззходы делителей 4 и 5 частоты, выполняющих роль сглаживающих делителей, и с их выходов импульсы приращений dX, д поступают на входы элементов ИЛИ 25 6 и 7, с выходов которых подаются на входы блоков 8 и 9 определения знака. Последние -коммутируют импульсы приращения лХ, ДУ в каналы
1246
плюс или минус в соответствии с заданными знаками. Выходные сигналы схемы 8 выбора знака поступают на входы коммутатора 29 блока 27 коррекции программы по координате X. Выходные сигналы блока определения знака перемещения, поступают на входы аналогичного коммутатора блока 28 . коррекции программы по координг те Y.
Рассмотрим работу устройства 25f коррекции программы, так как работа- устройства 252 .коррекции программы -аналогична Так как на управляющем входе коммутатора 26 имеется сигнал Работа без коррекции, то информа О
15
20
30
35
40
ция + ЛХ коммутируется на входа эле- налы появляются на выходах, подклю-
ментов ИЛИ 29 и 30 соответственно, а с их выходов - на входы блока 23 управления приводом. Выходной сигнал блока 23, управления приводом , поступает на вход привода 24, испол- ,„ нительного двигателя станка, который управляет исполнительным двигателем координаты X станка. Аналогично ра- . ботает устройство по координате «
чекных. ко входам триггера 27 и элемента ИЛИ 28. (
Если на входе коммутатора была информация по каналу плюс, то она появится на выходе кo мyтaтopa, 26, подключенного к S-входу триггера 27; если по кан;глу минус то на входе X,, благодаря чему триггер 27 запомиигает знак перемещения. Какой бы знак ни был у выходных импульсов они появляются на выходе элемента 1ШИ 28, Каж,цый выходной импульс этого элемента поступает на
В случае, если в кадре за,цана ко- 55 , система работает
манда V и W
следующим образом. Пуст.ь для определенности в кадре создана команда
25 246053V
.
., т.е. признак :внешнего контчура | Заметим, что задавать одновременно команды V и W нельзя, так как контур не может быть одновременно 5 и внутренним и внешним. В этом слу- чае R - S-триггер 13 устанавливается в положение единицы (S) и его выходной сигнал, воздействуя на вход элемента ИЛИ 15, формирует на его
О выходе сигнал Работа с коррекцией, который поступает на входл коммутаторов 3 и 26 Б устройствах 25, и 25j . Кроме того, единичный сигнгит с выхода триггера 13 поступает на элементы И
15 i7, 20. Совокупность элементов И 17, 18 и liJlH 19 реализует функцию форми- .рования сигнала суммирования попра - - БОК Признак сложения S а элементов И 20, 21 и элемента ИГШ 22 20 функцию поправок вычитания - Признак вычитания.
При этом реализуется логика по таблице на фиг„4, для чего подаются сигналы знака поправки или минус с пульта 10 и команды V и W с выходов триггеров 3 и 14. Для случаев, изображенных на фиг. 2 и 3, имеет знак минус ;, следовательно, два единичных потенциала присутствуют на входах элемента И 20, и на выходе элемента ИЛИ 22 будет сигнал Признак вычитания. Так как на входе коммутатора 3 присутствует сигнал Работа с коррекцией, то он коммутирует выходные сигналы интерполятора 2 4 дХ и 4лУ непосредственно на входы элементов ИЛИ 6,7, с выхода которых через блоки 8 и 9 определения знаков перемещений они пос- тзшают по канахгам соответствующих знаков на вхо,цы коммутаторов 26 устройств 25 и 25„ . Так как на входы коммутатора 26 теперь присутствует сигнал Работа-с коррекцией, сиг30
35
40
налы появляются на выходах, подклю-
чекных. ко входам триггера 27 и элемента ИЛИ 28. (
Если на входе коммутатора была информация по каналу плюс, то она появится на выходе кo мyтaтopa, 26, подключенного к S-входу триггера 27; если по кан;глу минус то на входе X,, благодаря чему триггер 27 запомиигает знак перемещения. Какой бы знак ни был у выходных импульсов они появляются на выходе элемента 1ШИ 28, Каж,цый выходной импульс этого элемента поступает на
формирователь 35 синхроимпульсов, на блок 37 умножения-И сумматор 36. При этом формирователь 35 синхроимпульсов вырабатывает импульс синхронизации, который поступает затем на один из входов сумматора 39, Блок 37 умножения на каждый запускающий импульс формирует пачку импульсов высокой частоты, причем число импульсов в пачке точно равно велич не .дК, следовательно число импульсов на выходе блока 37 умножения равно 4дХ дН. Эти импульсы поступают на вход блока 38 деления, на выходе которой появляется один импульс на каждые R импульсов на входе. .
Таким образом, на-выходе блока 4 деления имеем величину 4лХ дК : R, т.е. 4(. Эта величина поступает на вход сумматора 36. Сумматор 36 при наличии сигнала Признак сложения осуществляет сложение 4дХ с 4(5 , а при наличии сигнала Признак вычитания осуществляет операцию вычитания из величины 4дХ величины 4. Таким образом, на выходе сумматора 39 образуется последовательность импульсов, представляющая собой выражение (4дХ + ). Эта последовательность с выхода сумматора 36 поступает на входы элементов И 31,32. Эти элементы -управляются единичным и нулевым выходами ; триггера 30, состояние которого зависит от знака перемещения по координате X, При знаке плюс открыт элемент И 31, при знаке минус - элемент И 32.
С вьпсодов элементов И 31,32 после довательность импульсов, равная +(4дХ ± 45;), поступает на входы блоков 36 и 37 деления соответственно. С выходов блоков 33 и 34 деле- ния после деления на четыре на элементы ИЛИ 32 и 33 поступает последовательность, равная лХ +5х ,.т.е. величина скорректированного приращения согласно формулам (5) и (6). С выхода элементов ИЛИ 22 и 30 эти импульсы поступают на входы блока 23 управления приводом. Если в кадре задана команда W, то в едини- це будет триггер 14. Так как его выход объединен элементом ИЛИ 15 с единичным выходом триггера 13, то понятно, что устройство будет работать полностью аналогично предьщу
щему режиму; только .потдругому будет вырабатываться признак сложения и признак вычитания, что очевидно из таблицы, приведенной.на фиг.4. 5 Простота программирования, благо- даря которой не требуется третьей команды Отмена коррекций, достигается за счет того, что точка О, в которой находится инструмент перед to выходом на эквидистантную траекторию, выбирается на расстоянии R по нормали к эквидистантному контуру. В кадре, в котором задано перемещение ОА (фиг.2 и 3), задается команда, обрат- tS ная участку контура, на который необходимо выйти. Так, для внешних контуров (фиг.2 и 3) задается призн.ак W внутреннего контура, для внутренних контуров задается V - признак 20 внешнего контура. В результате система сама вычисляет поправки и знаки, выводит инструмент вместо точки А в точку А . Та же команда задается при возврате из точки А в 25 точку 0.
Формула изобретения
30
Система для программного управления, содержащая первый и второй дели- частоты, блок ввода программы, подключенный информационным выходом.: к входу интерполятора, а первым и вторым знаковыми выходами - соответственно к первым входам первого и
35 второго блоков определения знака перемещения, и два канала управления соответственно по координатам Х.и Y, каждай из которых состоит из блока управления приводом, связанного вы- ходом с приводом исполнительного двигателя станка, причем первый управляющий выход блока ввода программы соединен с выходом Ввод очередного кадра интерполятора к с вторы45. ми входами первого и второго блоков определения знака перемещения, о т- личающаяся тем, что, с целью расширения функЦиональньгх возможностей, в нее введены элемент НЕ,
50 первый коммутатор, пять элементов РШИ, четыре элемента И, пульт коррекции, два регистра, два RS-триггера и в . каждый канал управления - устройство коррекции программы, содержащее вто55 рой коммутатор, пятый и шестой элементы И, шестой, седьмой и восьмой элементы ИЛИ, третий RS-триггер, формирователь синхроимпульсов, блок ум-
ножения, блок деления, третий и четвертый делители и сумматор j, подклю-- ченный входом Признак сложения к выходу четвертого элемента ИЛИ, BXOдом Признак вычитания - к выходу пятого элемента ИЛИ, первым информационным входом - к выходу блока деления, вторым информацчонным входом - к входу фор- Шрователя синхроим пульсов, к первому входу блока умножения и к выходу шестого элемента иЛИ, сйнхровходом - к выходу формирователя синхроимпульсов, а выходом - .к первым входам пятого и шестого элементов И, соединенных выходами соответственно с входами третьего и четвертого делителей частоты, а первыми входами - соответственно с прямыми инверсным выходами третьего RS-триггера, подключенного S-входом к первому входу шестого элемента ИЛИ и к первому информационному выходу второго коммутатора, а R-BXO- дом - к второму входу шестого элемента ИЛИ и к второму информационному25 первым входом с вторым выходом пульта
выходу второго коммутатора, связанного третьим и четвертым информационными входами с первыми входами соответственно седьмого и восьмого элементов ИЛИ. подключенные вторыми входами соответственно к выходам третьего и четвертого делителей частоты, а выходами - соответственно к первому и второму входам блока управления приводом соответствующего канала управления, причем первый и , второй информационные вход1Ы второго коммутатора устройства коррекции программы канала управления по координате X соединены соответственно с первым и вторым выходами первого блока определенного знака перемещения., J а входы второго коммутатора устройства коррекции программы канала управления по координате Y - соответственно с первым и вторым выходами второго блока определения знака перемещения-, третий информационный вход второго коммутатора соединенс выходом элемента НЕ и с первым управляющим входом первого коммутатора, а четвертый информационный вход с входом элемента НЕ, с
ныходом третьего элемента ИЛИ и с вуо рым управляюшд м входом первого коммута тора,соединенного первым и вторым информационными входами с первым и
вторым информационными выходами ин- терполятора,. первым и - яторым информационными выходами соответственно с входами первого и второго делителей частоты, а третьим и четвертым
выходами - с первыми входами соответственно первого и второго эле- ментов К(ЛИ, подключенных вторыми входами соответственно к выходам первого и второго делителей частоты,
а выходами - к третьим входам соответственно первого и второго блоков определения знака перемещения, первый выход пульта коррекции подключен к первому входу второго элемента И, а также к первому входу третьего элемента И, связанного выходом с первым входом пятого элемента ИЛИ, подключенного вторым входом к выходу четвертого элемента И, соединенного
30
35
40
45
50
коррекции и первым входом первого элемента И, подключенного выходом к пер- во му входу четвертого элемента ИЛИ, связанного вторым входом с выходом второго элемента И, подключенного вторым входом к второму входу четвертого элг )ента И, к прямому выходу второго триггера и к первому входу третьего элемента ИЛИ, связанного вторым входом с вторыми входами пер- вого и третьего элементов И и с прямым выходом первого RS-триггера, связанного R-входом .с R-входом второго RS-триггера и с выходом Конец кадра интерполятора, а S-входом - с вторым управляющим выходом блока ввода программы, подключенного третьим управляющим выходом к З-входу второго триггера и к первым входам блоков деления, соединенных вторыми входами с соответствующими блоками умножения, а третьими входами - с выходом второго регистра, подключенно- .го входом к третьему выходу пульта коррекции, связанного четвертым выходом с входом первого регистра, соединенного с вторыми входами блоков умножен:ил обоих каналов управления.
tia Н двигатель станка
На 2 ii двигатель станка
н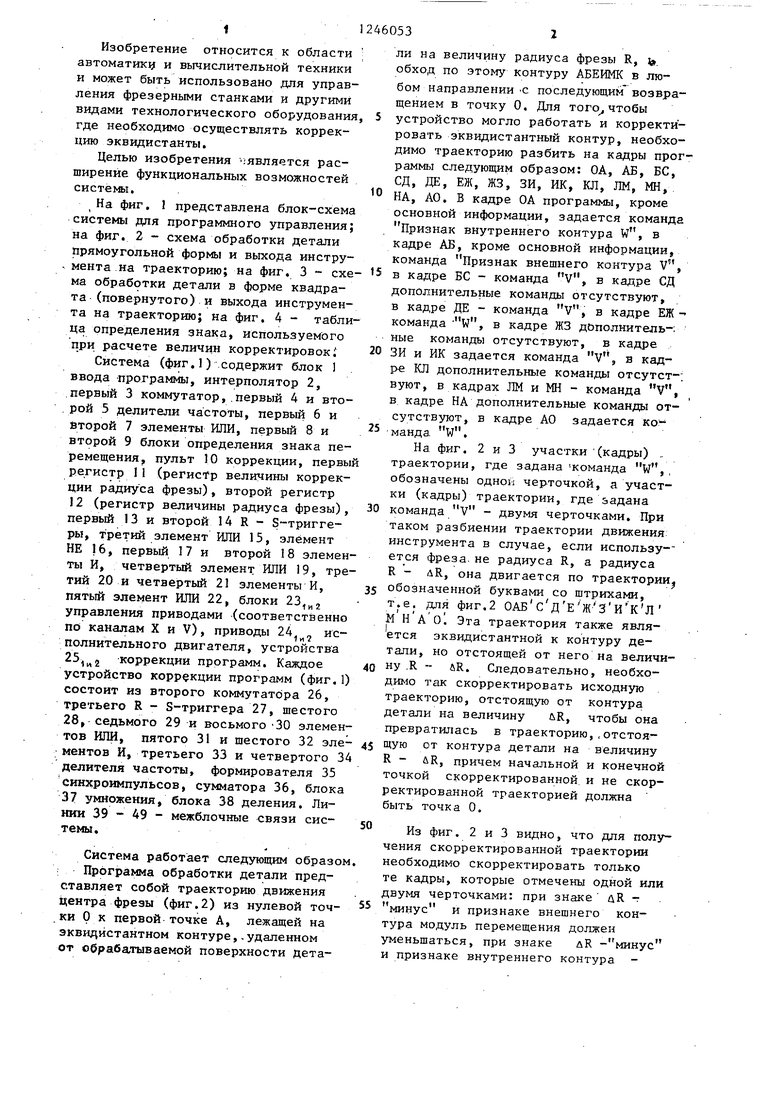
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программного управления | 1985 |
|
SU1280571A1 |
| Устройство для числового программного управления станками | 1985 |
|
SU1291928A1 |
| Устройство для задания программы | 1979 |
|
SU849148A1 |
| Устройство для программного управления | 1981 |
|
SU976428A1 |
| Устройство для программного управления | 1979 |
|
SU862117A1 |
| Устройство для программного управления станком | 1979 |
|
SU862119A1 |
| Устройство для двухкоординатного программного управления | 1981 |
|
SU962857A1 |
| Круговой интерполятор | 1988 |
|
SU1566321A1 |
| Устройство для коррекции эквидистанты | 1985 |
|
SU1275375A1 |
| Программное задающее устройство для токарного станка с программным управлением | 1981 |
|
SU1012688A1 |
Изобретение относится к области автоматики и вычислительной техники и может быть использовано для управления фрезерными станкам и другими видами технологического- оборудования, в котором .необходимо осуществлять коррекцию эквидистанты. Целью изобретения является расширение функциональных возможностей системы, которое достигается реализацией функции коррекции эквидистант-, представляющих собой ломаную линию. Система содержит блок ввода программы, интерполятор, пять элементов ИЛИ, четыре элемента И, два делителя частоты, два триггера, коммутатор, элемент НЕ, два регистра, два блока определения знака перемещения, пульт коррекции, два блока управления приводами и два устройства коррекции . программ, каждое из которых содержит коммутатор, триггер, три элемента ИЛИ, два элемента И, два делителя частоты, формирователь синхроимпульсов, сумматор, блок умножения и блок деления. 4 ил. i СЛ ISP 4 а о СЛ САЭ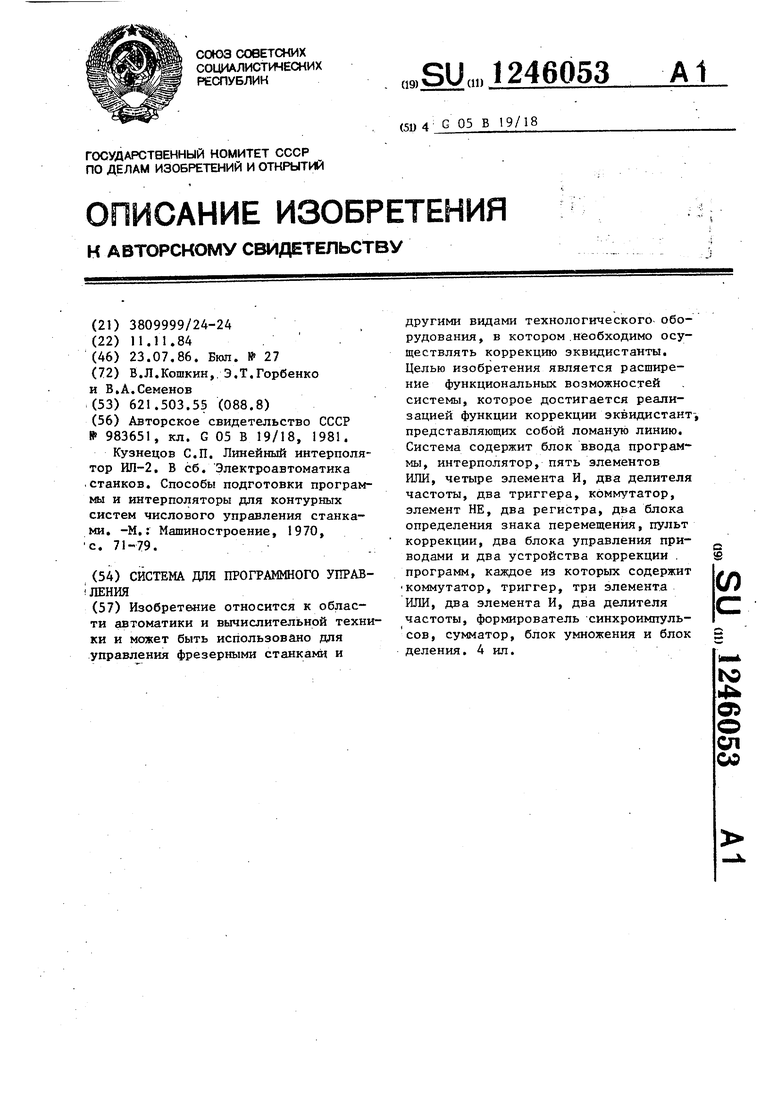
Фиг,
Редактор Н.Егорова
Составитель А.Лишанский
Техред М.Ходанич Корректор И.Муска
Заказ 3998/40Тираж 836Подписное
ВНИИПИ Государственного комитета СССР:
по дел ам изобретений и открытий 113035, Москва, Ж-35, Раушск:ая наб., д.4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная,4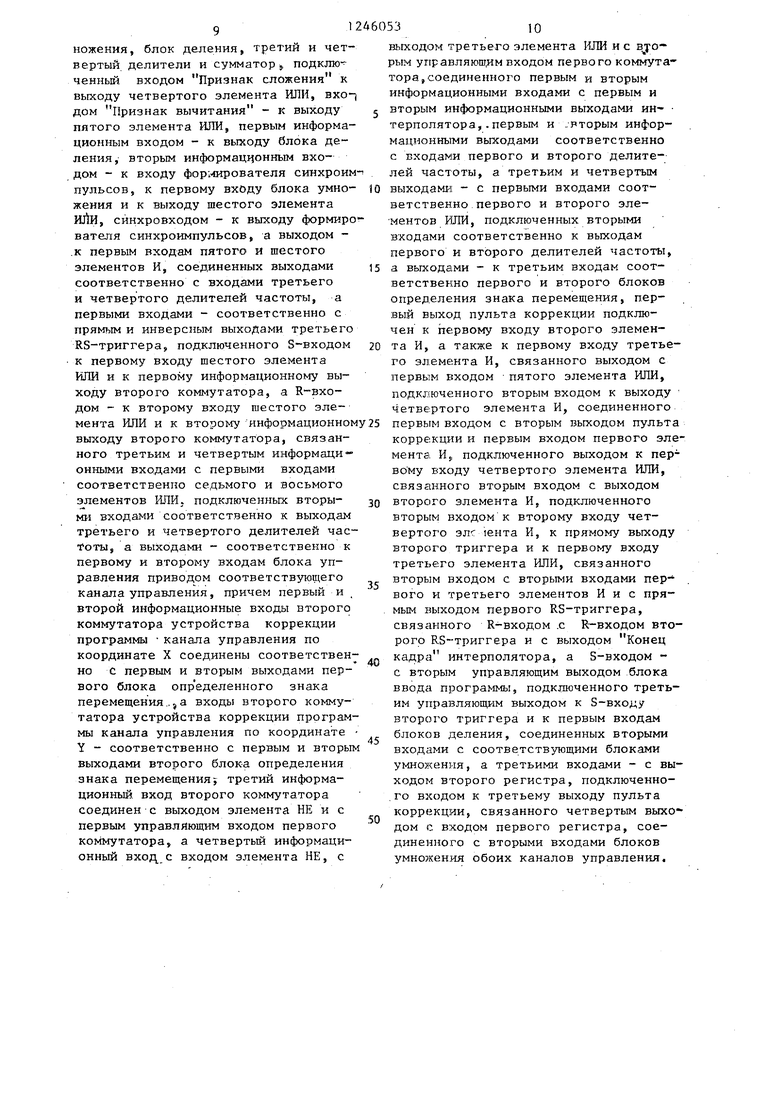
| Устройство для коррекции положения резца на станке с программным управлением | 1981 |
|
SU983651A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Кузнецов С.П | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| В сб | |||
| Электроавтоматика .станков | |||
| Способы подготовки программы и интерполяторы для контурных систем числового управления станками, -М.: Машиностроение, 1970 с | |||
| Контрольный стрелочный замок | 1920 |
|
SU71A1 |
