(54) ПРИВОД ПОДАЧ С ДИСКРЕТНЫМ ПЕРЕМЕЩЕНИЕМ
1
Изобретение относится к станкостроению и может быть использовано в механизмах подач станков для дробления стружки.
Известен привод подач с дискретным перемещением суппорта, содержащий коробку подач, фартук, кинематически связанный с коробкой подач через червячную передачу, механизм пульсации и устройство для его включения в кинематическую цепь I).
Недостатком известного устройства является его низкая надежность.
Цель изобретения - повышение надежности привода.
Поставленная цель достигается тем, что механизм пульсации выполнен в виде двухвенцового зубчатого колеса, установленного соосно с червячным колесом, двух неподвижно закрепленных зубчатых дисков, связанных с двухвенцовым колесом, введенным в механизм гибким упругим элементом, и диска со .смонтированными на его периферии роликани, установленного между неподвижными дисками и кинематически связанного с червяком.
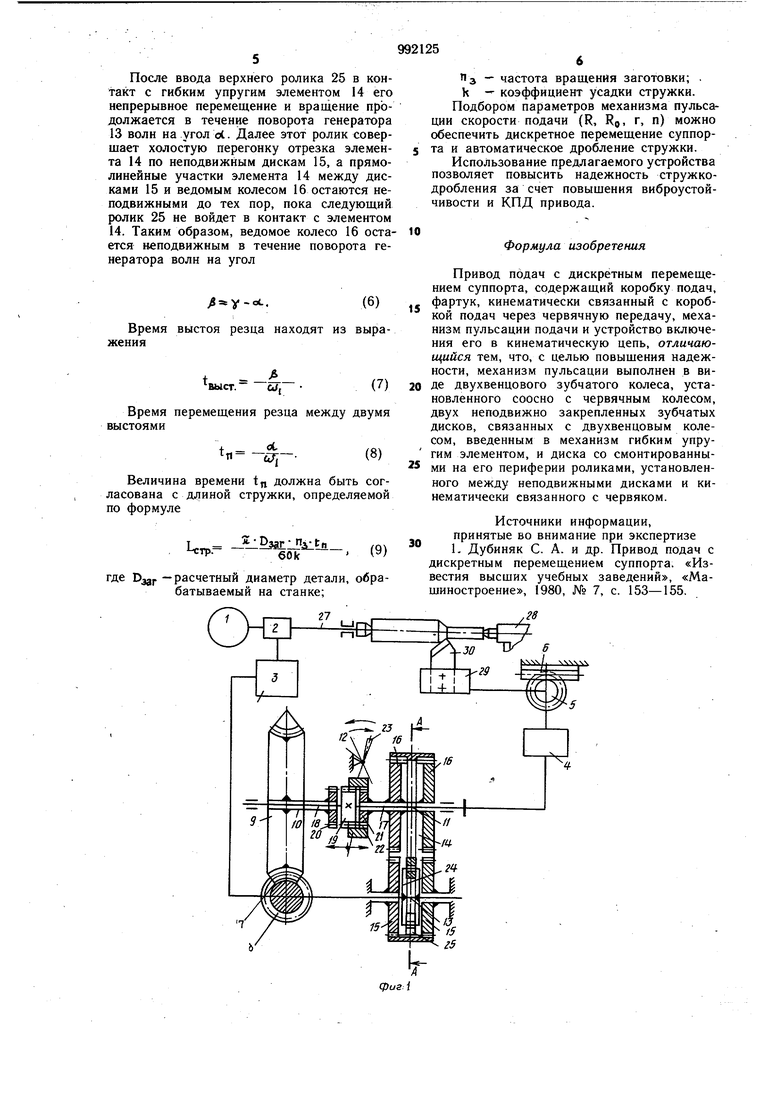
На фиг. 1 показана принципиальная схема привода; на фиг. 2 - схема механизма пульсации.
СУППОРТА
Привод содержит двигатель (электромотор) 1, коробку 2 скоростей, коробку 3 подач и зубчатую передачу 4 фартука с реечной щёстерней 5, взаимодействующей с р1ейкой 6, неподвижно прикрепленной к станине станка. Коробка подач и зубчатая передача фартука кинематически соединены между собой червячной передачей 7, включающей червяк 8 и червячное колесо 9, установленное на полом валу 10. Червячная передача снабжена механизмом 11 пульсации подачи и устройством 12 для включения-выключения его в кинематическую цепь в виде зубчатой муфты.
Механизм 11 пульсации подачи выполнен в виде насосной волновой зубчатой пе15 редачи, образованной генератором 13 волн в виде диска с роликами, закрепленным на валу червяка 8 и объединенным гибким упругим элементом (кольцом) 14 с двумя неподвижными зубчатыми дисками 15 обката и ведомым двухвенцовым зубчатым колесом 16, соосным с валом 10 червячного колеса и установленным на полом валу 17. Полые валы 10 и 17 опираются на сквозной вал 18, на котором закреплена средняя зубчатая полу муфта 19 устройства 12.
На хвостовиках полых валов закреплены две другие зубчатые полумуфты 20 и 21, каждая из которых может поочередно соединяться с полу муфтой 19 с помощью зубчатой обоймы 22, управляемой рукояткой 23. Вал 18 кинематически связан с зубчатой передачей 4 фартука.
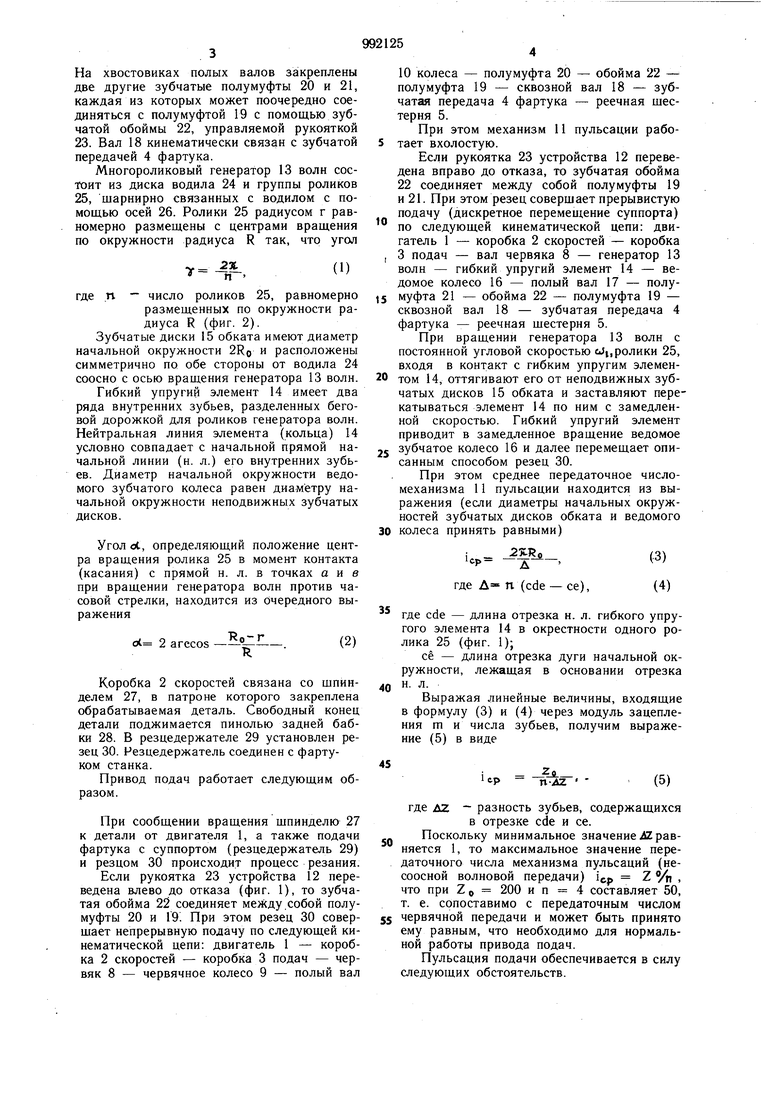
Многороликовый генератор 13 волн состоит из диска водила 24 и группы роликов 25, шарнирно связанных с водилом с помощью осей 26. Ролики 25 радиусом г равномерно размещены с центрами вращения по окружности радиуса R так, что угол
V- 2-К.
(i;
где п - число роликов 25, равномерно размещенных по окружности радиуса R (фиг. 2).
Зубчатые диски 15 обката имеют диаметр начальной окружности 2Ro и расположены симметрично по обе стороны от водила 24 соосно с осью вращения генератора 13 волн.
Гибкий упругий элемент 14 имеет два ряда внутренних зубьев, разделенных беговой дорожкой для роликов генератора волн. Нейтральная линия элемента (кольца) 14 условно совпадает с начальной прямой начальной линии (н. л.) его внутренних зубьев. Диаметр начальной окружности ведомого зубчатого колеса равен диаметру начальной окружности неподвижных зубчатых дисков.
Угол ot, определяющий положение центра вращения ролика 25 в момент контакта (касания) с прямой н. л. в точках айв при вращении генератора волн против часовой стрелки, находится из очередного выражения
(2)
о1 2 arccos --S--Коробка 2 скоростей связана со щпинделем 27, в патроне которого закреплена обрабатываемая деталь. Свободный конец детали поджимается пинолью задней бабки 28. В резцедержателе 29 установлен резец 30. Резцедержатель соединен с фартуком станка.
Привод подач работает следующим образом.
При сообщении вращения щпинделю 27 к детали от двигателя 1, а также подачи фартука с суппортом (резцедержатель 29) и резцом 30 происходит процесс резания.
Если рукоятка 23 устройства 12 переведена влево до отказа (фиг. 1), то зубчатая обойма 22 соединяет между.собой полумуфты 20 и 19 При этом резец 30 совершает непрерывную подачу по следующей кинематической цепи: двигатель 1 - коробка 2 скоростей - коробка 3 подач - червяк 8 - червячное колесо 9 - полый вал
10 колеса - полумуфта 20 - обойма 22 - полумуфта 19 - сквозной вал 18 - зубчатая передача 4 фартука - реечная щестерня 5.
При этом механизм 11 пульсации работает вхолостую.
Если рукоятка 23 устройства 12 переведена вправо до отказа, то зубчатая обойма 22 соединяет между собой полумуфты 19 и 21. При этом резец совершает прерывистую подачу (дискретное перемещение суппорта) по следующей кинематической цепи: двигатель 1 - коробка 2 скоростей - коробка 3 подач - вал червяка 8 - генератор 13 волн - гибкий упругий элемент 14 - ведомое колесо 16 - полый вал 17 - полумуфта 21 - обойма 22 - полу муфта 19 - сквозной вал 18 - зубчатая передача 4 фартука - реечная шестерня 5.
При вращении генератора 13 волн с постоянной угловой скоростью cJi,ролики 25, входя в контакт с гибким упругим элементом 14, оттягивают его от неподвижных зубчатых дисков 15 обката и заставляют перекатываться элемент 14 по ним с замедленной скоростью. Гибкий упругий элемент приводит в замедленное вращение ведомое зубчатое колесо 16 и далее перемещает описанным способом резец 30.
При этом среднее передаточное числомеханизма 11 пульсации находится из выражения (если диаметры начальных окружностей зубчатых дисков обката и ведомого колеса принять равными)
icp ,
(3) (4) где Д п (cde -се).
где cde - длина отрезка н. л. гибкого упругого элемента 14 в окрестности одного ролика 25 (фиг. 1);
сё - длина отрезка дуги начальной окружности, лежащая в основании отрезка н. л.
Выражая линейные величины, входящие в формулу (3) и (4) через модуль зацепления m и числа зубьев, получим выражение (5) в виде
- 2i
(5)
icp
п-лг
где AZ разность зубьев, содержащихся
в отрезке cde и се.
Поскольку минимальное значение AZ равняется 1, то максимальное значение передаточного числа механизма пульсаций (несоосной волновой передачи) icp Z % , что при Z о 200 и п 4 составляет 50, т. е. сопоставимо с передаточным числом червячной передачи и может быть принято ему равным, что необходимо для нормальной работы привода подач.
Пульсация подачи обеспечивается в силу следующих обстоятельств. После ввода верхнего ролика 25 в контакт с гибким упругим элементом 14 его непрерывное перемещение и вращение продолжается в течение поворота генератора 13 волн на угол oi. Далее этот ролик совершает холостую перегонку отрезка элемента 14 по неподвижным дискам 15, а прямолинейные участки элемента 14 между дисками 15 и ведомым колесом 16 остаются неподвижными до тех пор, пока следующий ролик 25 не войдет в контакт с элементом 14. Таким образом, ведомое колесо 16 оста ется неподвижным в течение поворота генератора волн на угол У-с.. Время выстоя резца находят из выраженияВремя перемещения резца между двумя выстоями + - °Тп,-т-- Величина времени t должна быть согласована с длиной стружки, определяемой по формуле I - 5зйг15а1Ёл. где Озаг -расчетный диаметр детали, обрабатываемый на станке;
S Пз - частота вращения заготовки; . k - коэффициент усадки стружки. Подбором параметров механизма пульсации скорости подачи (R, Rp, г, п) можно обеспечить дискретное перемещение суппорта и автоматическое дробление стружки. Использование предлагаемого устройства позволяет повысить надежность стружкодробления за счет повышения виброустойчивости и КПД привода. Формула изобретения Привод подач с дискретным перемещением суппорта, содержащий коробку подач, фартук, кинематически связанный с коробкой подач через червячную передачу, механизм пульсации подачи и устройство включения его в кинематическую цепь, отличающийся тем, что, с целью повышения надежности, механизм пульсации выполнен в виде двухвенцового зубчатого колеса, установленного соосно с червячным колесом, двух неподвижно закрепленных зубчатых дисков, связанных с двухвенцовым колесом, введенным в механизм гибким упругим элементом, и диска со смонтированными на его периферии роликами, установленного между неподвижными дисками и кинематически связанного с червяком. Источники информации, принятые во внимание при экспертизе 1, Дубиняк С. А. и др. Привод подач с дискретным перемещением суппорта. «Известия высших учебных заведений, «Машиностроение, 1980, № 7, с. 153-155.
фиг. г
fff
26
2Ц/J
| название | год | авторы | номер документа |
|---|---|---|---|
| Токарный автомат | 1980 |
|
SU884897A2 |
| Токарный автомат | 1976 |
|
SU715244A1 |
| Дискретный привод подач токарного станка | 1985 |
|
SU1491616A1 |
| Автомат для изготовления плетеной металлической сетки | 1971 |
|
SU444593A1 |
| Устройство для предохранения цепипОдАч CTAHKA OT пЕРЕгРузКи | 1979 |
|
SU804217A1 |
| ЧЕРВЯЧНАЯ ПЕРЕДАЧА, СПОСОБ ЕЕ ИЗГОТОВЛЕНИЯ, ОБОРУДОВАНИЕ И ИНСТРУМЕНТ ДЛЯ ЕЁ ВЫПОЛНЕНИЯ | 1998 |
|
RU2200262C2 |
| Универсальный зубообрабатывающий станок с ЧПУ | 1987 |
|
SU1715520A1 |
| Коробка скоростей | 1988 |
|
SU1677421A1 |
| МЕХАНИЗМ АВТОМАТИЧЕСКОГО ОСТАНОВА СУППОРТА | 1971 |
|
SU290812A1 |
| Механизм подачи шпинделя сверлильного станка | 1980 |
|
SU933292A1 |

