(5) ПЕРЕДВИЖНАЯ УСТАНОВКА ДЛЯ ОБРАБОТКИ ЗАГОТОВЛЕННОГО ЛЕСА
1
Изобретение относится к механизмам лесной промышленности, в част нрсти к установкам для первичной обработки заготовленного леса.
Известна передвижная установка для обработки заготовленного леса, включающая подвижное основание и кинематически связанный с ним манипулятор в виде балки с челюстным захватом J. .10
Недостатками такой установки являются ограничение ее технологических возможностей и сложность конструкции.
Цель изобретения - расширение нологических возможностей.
Поставленная цель достигается тем что манипулятор снабжен дополнительной,- связанной с захватом раздвижной балкой с -приводом, .причем основ- 20 ная и дополнительная балки выполнены поворотными, в плоскости, проходящей через их оси, а ры-чаги челюстей захвата спарены. Кроме того, установка
снабжена приводом автономного пере движения.. i;
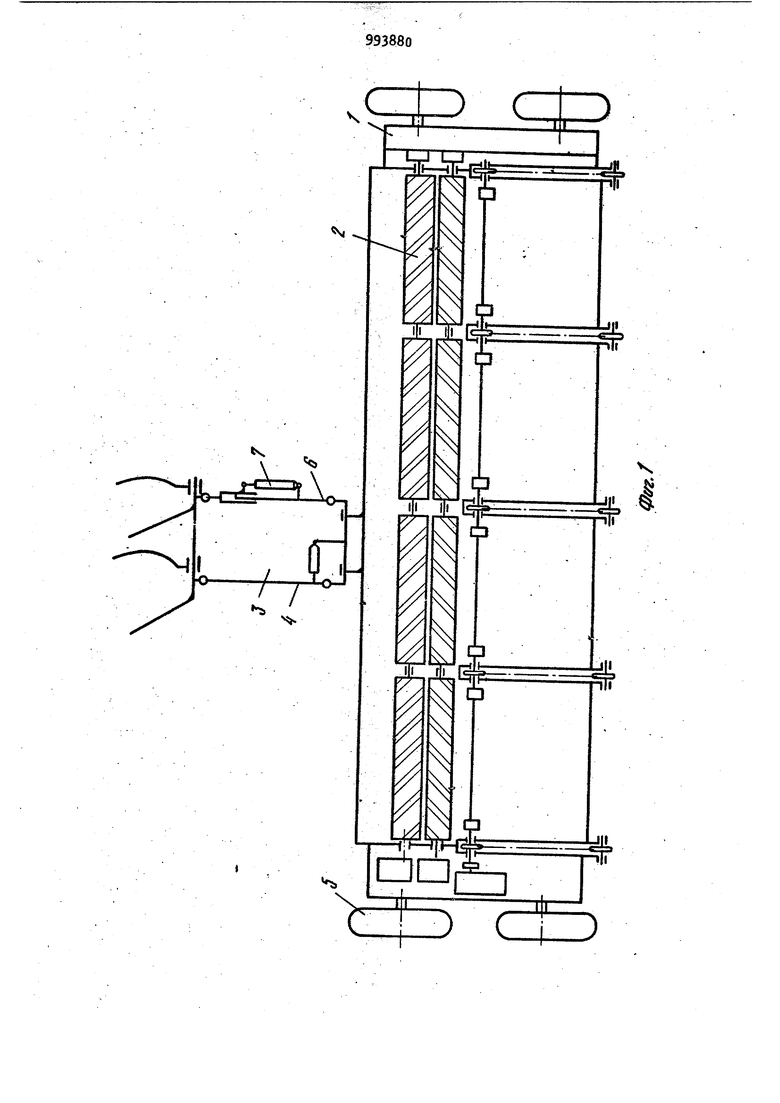
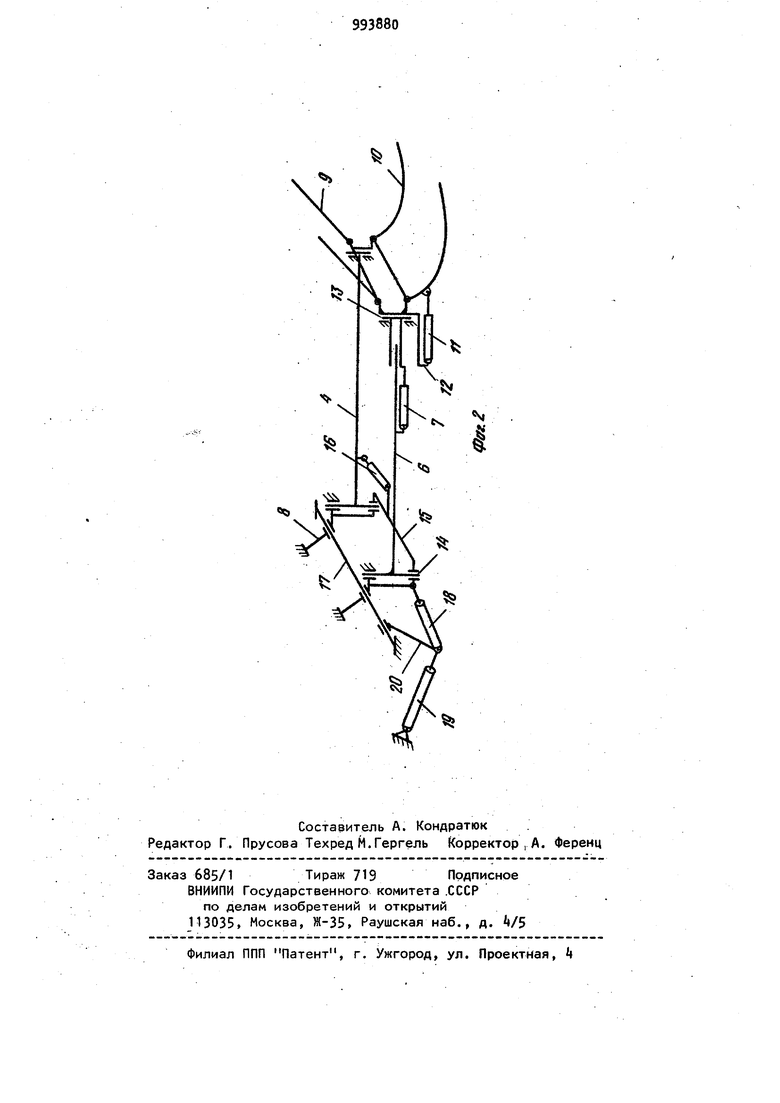
На фиг. t показана передви)тая установка для обработки заготовяеиного леса, вид в плане;.на фиг. 2 « кинематическая схема манипуляторе установки. .
Передвижная установка для обработки заготовленного леса включает подвижное основание 1, на котором смонтированы механизм, производящие обработку леса, например шнековое сучкорезное устройство 2, кинематически связанный с основанием 1 загрузочный манипулятор 3 в виде балки t с челюстным захватом, привод 5 автономного перемещения установки.. ; Манипулятор 3 снабжен дополнительной, связанной с захватом раздвижной балкой 6 с автономным лриводом - гидроцилиндром 7 и устанавливается ла установку с помощью кронштейнов 8. Челюстной захват содержит жесткие 9 и поворотные 10 спаренные рычаги, которые приводятся в де ствие гидроцилиндром 11, шарнирно закрепленным на раме 12. Рама 12 по редством шарниров 13 соединена с ба кой и дополнительной раздвижной балкой 6, которые в свою очередь по редством шарниров Т соединены с по воротной рамкой 15. Балка 4 соединена шарнирно с рамкой 15 посредством шарнирно закрепленного гидроцилиндра 16. Балки 4 и б соединены, кроме того, шарнирно с рамой 12 и п воротной рамкой 15 и образуют при этом подвижный параллелограмм. Поворотная рамка 15 монтируется на кронштейнах 8 посредством оси 17 и снабжена системой гидроцилиндров 18 и 19, а также поворотным рычагом 20, установленным на оси 17 что дает возможность поворота рамки 15 вместе с манипулятором 3 на угол 90 и более в вертикальной плоскости. Работа установки осуществляется в следующей- последовательности. Установка надвигается на уложенный перед ней в штабель лес. Примем направление перемещения установки является поперечным по от ношению к продольной оси уложенного перед ней леса. Набор леса из штабеля и подача его на обработку производится манипулятором 3 с челюстными захватами. В этом случае, когд центр тяжести подлежащего захвату леса не совпадает со средним положе нием манипулятора 3 то есть с поло жением, когда балки и б перпендикулярны п эодольной оси установки, з смет включения гидроцилиндра 16 осу ществляется поворот балок б и 4 в горизонтальной плоскости, а вместе с ними и челюстного захвата относительно продольной оси леса до положения, обеспечивающего возможность набора пачки. Набор пачки леса из штабеля производится поворотными рычагами 10, которые приводятся в движение гидроцилиндром 11. Когда продольная ось захватываемого леса, расположенного перед установкой, не совпадает с ее продоль ной осью, а располагается под некоторым углом, тогда челюстной захват манипулятора 3 разворачивают в нужное для набора леса положение за смет изменения длины дополнительной раздвижной балки 6 посредством гидроцилиндра 7. Набранная пачка леса манипулятором 3 погружается в шнековое сучкорезное устройство 2, расположенное на установке, и обрабатывается. Выгрузка .обработанного леса производится поперечным цепным транспортером. Далее работа производится аналогичным образом. Предлагаемая конструкция передвижной .установки для обработки заготовленного леса позволяет осуществлять его обработку в положении, при котором .установка имеет поперечную траекторию перемещения по отношению к продольной оси уложенного перед ней леса. При этом производится подача леса с одновременной обработкой его и выгрузкой готовой продукции за установку, что значительно расширяет ее технологические возможности. Формула изобретения 1. Передвижная установка для обработки заготовленного леса, включающая подвижное основание и кинематически связанный с ним манипулятор в виде балки с челюстным захватом, отличающаяся тем, что, с целью расширения технологических возможностей, манипулятор снабжен дополнительной, связанной с захватом, раздвижной балкой с приводом, причем основная и дополнительная балки выполнены поворотными в плоскости, проходящей через их оси, а рычаги челюстей захвата спарены. 2. Передвижная установка по п.1, отличающаяся тем, что она снабжена приводом автономного передвижения. Источники информации, принятые во внимание при экспертизе 1.. Авторское свидетельство СССР по заявке № 2804608, кл. А 01 G 23/08, 1979 (прототип).
3 с
С
%
N
| название | год | авторы | номер документа |
|---|---|---|---|
| МАШИНА ДЛЯ ОБРАБОТКИ ПРЕДВАРИТЕЛЬНО ПОВАЛЕННЫХ ДЕРЕВЬЕВ | 1969 |
|
SU233347A1 |
| СПОСОБ РАСКРЯЖЕВКИ УЛОЖЕННЫХ В ШТАБЕЛЬ ДЕРЕВЬЕВ | 2014 |
|
RU2599563C2 |
| Лесозаготовительная машина | 1985 |
|
SU1266493A1 |
| СПОСОБ ОБРАБОТКИ ДЕРЕВЬЕВ, СКЛАДИРОВАННЫХ В ШТАБЕЛЕ | 2023 |
|
RU2819280C1 |
| Лесозаготовительная машина | 1982 |
|
SU1128872A1 |
| Валочно-сучкорезная машина | 1977 |
|
SU818553A1 |
| Устройство для поштучной выдачи деревьев из пачки | 1976 |
|
SU606793A1 |
| Способ обработки поваленных деревьев манипуляторной машиной | 1984 |
|
SU1246946A1 |
| Челюстной погрузчик | 1983 |
|
SU1138382A1 |
| УСТРОЙСТВО ДЛЯ ТРЕЛЕВКИ ДРЕВЕСИНЫ | 1991 |
|
RU2040459C1 |