(5) УСТРОЙСТВО ДЛЯ УДАЛЕНИЯ ДЕТАЛЕЙ ИЗ РАБОЧЕЙ ЗОНЫ ПРЕССА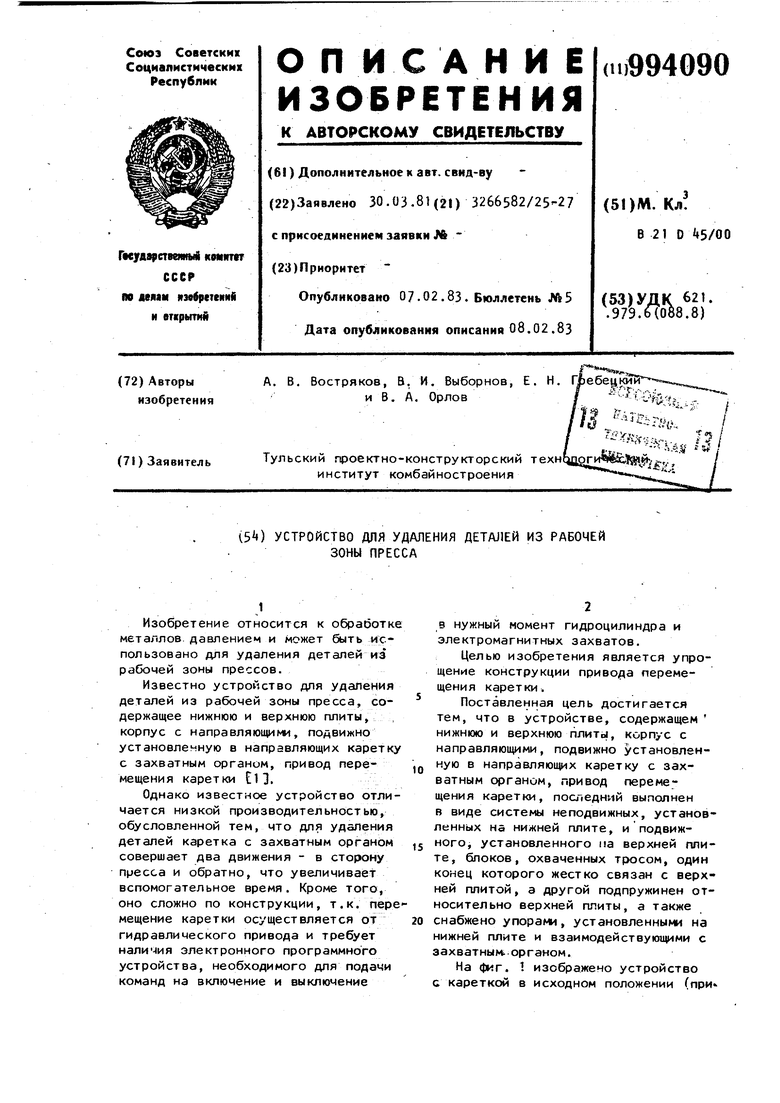
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ УДАЛЕНИЯ ДЕТАЛЕЙ ИЗ РАБОЧЕЙ ЗОНЫ ПРЕССА | 1992 |
|
RU2094156C1 |
| Автоматическая линия для изготовления деталей типа топоров | 1989 |
|
SU1727945A1 |
| Устройство для подачи листовых заготовок в рабочую зону пресса | 1991 |
|
SU1777569A3 |
| Устройство для подачи проволоки в рабочую зону штампа | 1981 |
|
SU1005994A1 |
| Устройство для перемещения материала в рабочей зоне пресса | 1990 |
|
SU1752470A1 |
| Устройство для изготовления деталей из длинномерного материала | 1983 |
|
SU1166868A1 |
| Устройство для подачи полосового и ленточного материала в рабочую зону штампа | 1985 |
|
SU1248704A1 |
| Устройство для удаления отходов из рабочей зоны пресса | 1990 |
|
SU1759510A1 |
| Устройство для подачи полосового и ленточного материала в рабочую зону пресса | 1983 |
|
SU1134264A1 |
| Устройство для подачи ленточного материала в рабочую зону вырубного штампа | 1991 |
|
SU1780905A1 |
1
Изобретение относится к обработке металлов, давлением и Может быть использовано для удаления деталей из рабочей зоны прессов.
Известно устройство для удаления деталей из рабочей зоны пресса, содержащее нижнюю и верхнюю плиты, корпус с направляющими, подвижно установленную в направляющих каретку с захватным органом, привод перемещения каретки El3.
Однако известное устройство отличается низкой производительностью, обусловленной тем, что для удаления деталей каретка с захватным органом совершает два движения - в сторону пресса и обратно, что увеличивает вспомогательное время. Кроме того, оно сложно по конструкции, т.к. перемещение каретки осуществляется от гидравлического привода и требует наличия электронного программного устройства, необходимого для подачи команд на включение и выключение
в нужный момент гидроцилиндра и электромагнитных захватов.
Целью изобретения является упрощение конструкции привода перемещения каретки.
Поставленная цель достигается тем, что в устройстве, содержащем нижнюю и верхнюю плиты, корпус с направляющими, подвижно установлен,Q ную в направляющих каретку с захватным органом, привод перемещения каретки, последний выполнен в виде системы неподвижных, установленных на нижней плите, и подвиж,5 ного, установленного на верхней плите, блоков, охваченных тросом, один конец которого жестко связан с верхней плитой, а другой подпружинен относительно верхней плиты, а также
20 снабжено упорами, установленными на нижней плите и взаимодействующими с захватным. органом.
На (|)иг. 1 изображено устройство с кареткой в исходном положении (при
399 090-4
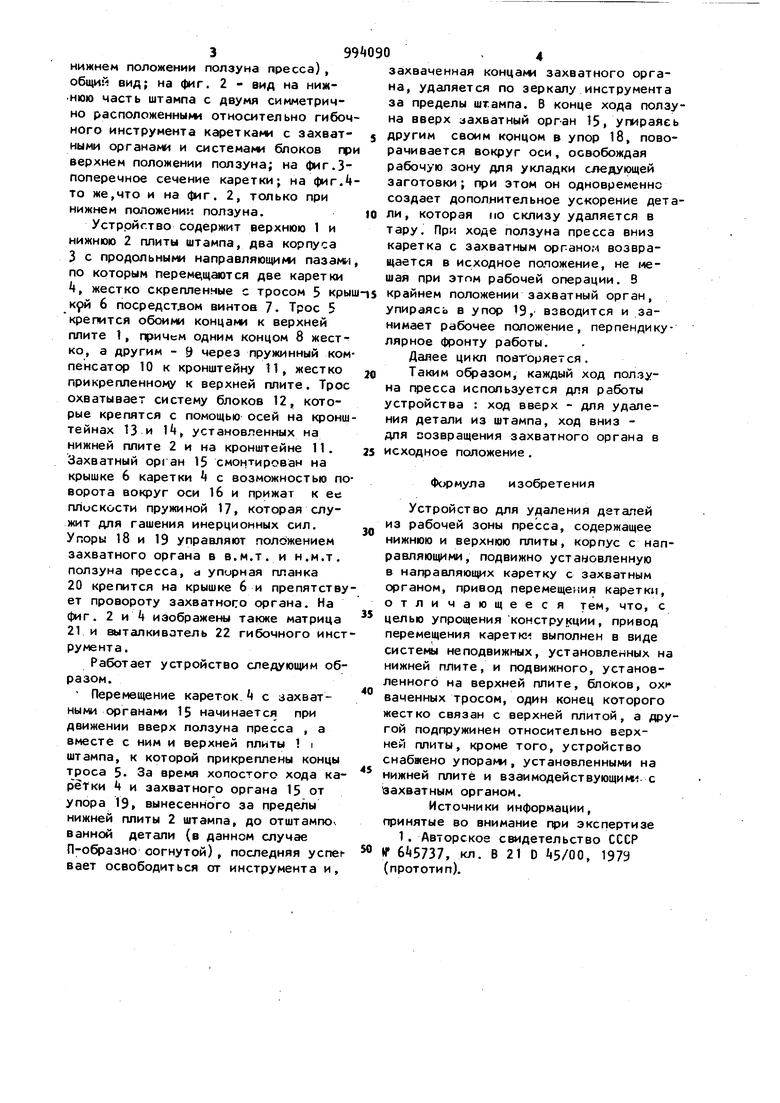
нижнем положении ползуна пресса) ,захваченная концами захватного оргаобщий вид; на фиг. 2 - вид на ниж-на, удаляется по зеркалу инструмента
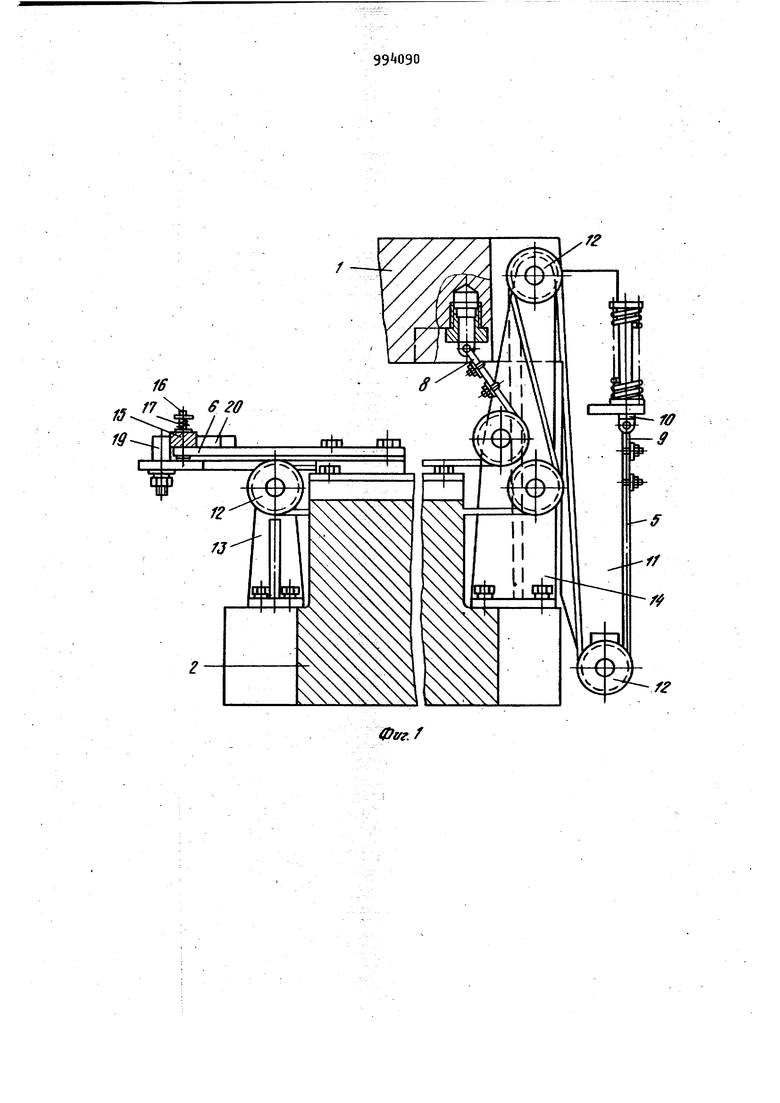
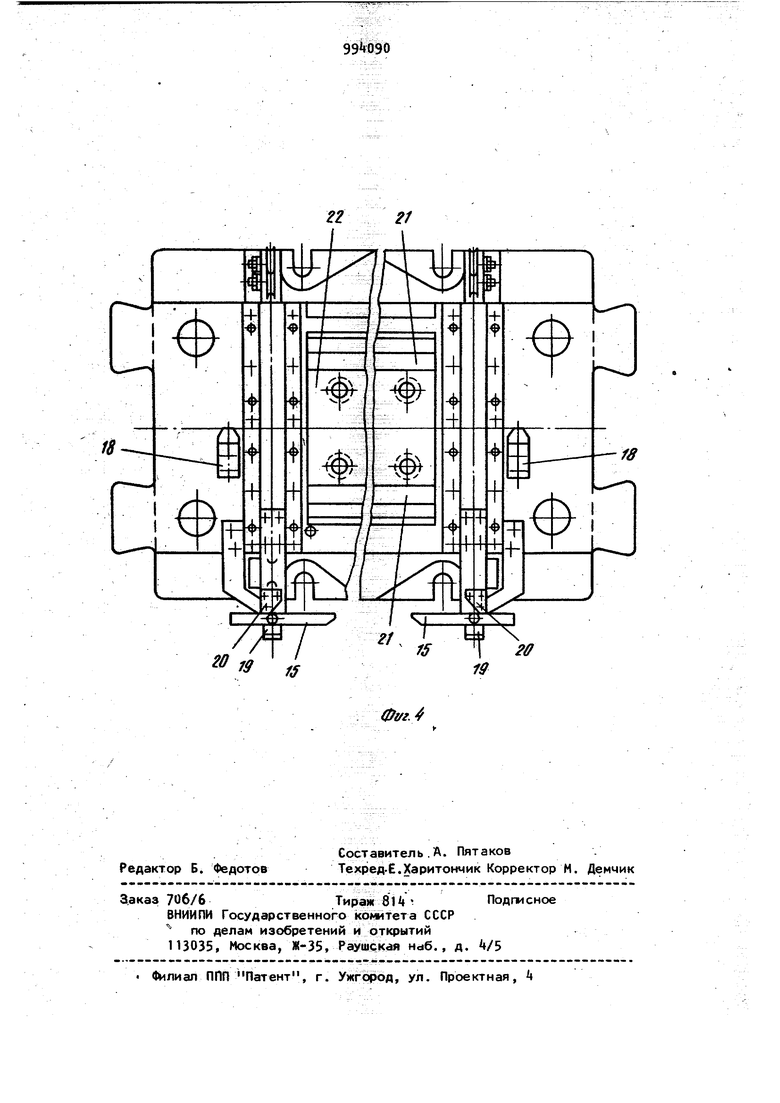
нюю часть штампа с двумя симметрично расположенными относительно гибочного инструмента каретками с захватными органами и системами блоков при верхнем положении ползуна; на фиг.Зпоперечное сечение каретки; на фигЛто же,что и на фиг. 2, только при нижнем положении ползуна.
Устррйг.тво содержит верхнюю 1 и нижнюю 2 плиты штампа, два корпуса 3 с продольными направляющими пазам по которым перем€;щаотся две каретки k, жестко скрепленные с тросом 5 кры крй 6 посредством винтов 7. Трос 5 крепится обоими концами к верхней плите t, причем одним концом 8 жестко, а другим - 9 через пружинный ком пенсатор 10 к кронштейну 11, жестко прикрепленному к верхней плите. Трос охватывает систему блоков 12, которые крепятся с помощью осей на кронш тейнах 13 и It, установленных на нижней плите 2 и на кронштейне 11. Захватный орган 15 смонтирован на крышке 6 каретки с возможностью по ворота вокруг оси 16 и прижат к ее плоскости пружиной 17, которая служит для гашения инерционных сил. Упоры 18 и 19 управляют положением захватного органа в в.м.т. и н.м.т. ползуна пресса, а упорная планка 20крепится на крышке 6 и препятству ет провороту захватного органа. На фиг. 2 k изображены также матрица 21и выталкиватель 22 гибочного инст румента. Работает устройство следующим образом. Перемещение кареток с захватными органами 15 начинается при движении вверх ползуна пресса , а вместе с ним и верхней плиты 1 г штампа, к которой прикреплены концы троса 5. За время холостого хода карётки и захватного органа 15 от упора 19, вынесенного за пределы нижней плиты 2 штампа, до отштампоч ванной детали (в данном случае П-образно согнутой), последняя ycne вает освободиться от инструмента и.
за пределы штампа. В конце хода ползуна вверх захватный орган 15, упираясь
другим своим концом в упор 18, поворачивается вокруг оси, освобождая рабочую зону для укладки следующей заготовки; при этом он одновременно создает дополнительное ускорение детали, которая по склизу удаляется в тару. При ходе ползуна пресса вниз каретка с захватным органом возвращается в исходное положение, не («шая при этом рабочей операции. В крайнем положении захватный орган, упираясь в упор 19, взводится и занимает рабочее положение, перпендикулярное фронту работы, Даяее цикл повторяется. Таким образом, каждый ход ползуна пресса используется для работы устройства : ход вверх - для удаления детали из штампа, ход вниз для созвращения захватного органа в исходное положение, Ф рмула изобретения Устройство для удаления деталей из рабочей зоны пресса, содержащее нижнюю и верхнюю плиты, корпус с направляющими, подвижно установленную в направляющих каретку с захватным органом, привод перемещения каретки, отличающееся тем, что, с целью упрощения конструкции, привод перемещения карет ю-) выполнен в виде системы неподвижных, установленных на нижней плите, и подвижного, установленного на верхней плите, блоков, ох ваченных тросом, один конец которого жестко связан с верхней плитой, а другой подпружинен относительно верхней плиты, кроме того, устройство снабжено упоракм , установленными на нижней плите и взаимодействующими, с захватным органом. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР Vf , кл, В 21 D «5/00, 1979 (прототип). гг / bJ
Фиг 2 /
фуг.
