Изобретение относится к устройствам транспортировки заготовок и изделий в автоматических линиях с HaiKOпителями.
Известен автооператор, содержащий портал, на верхних и нижних направляющих которого установлена каретка с верхними и нижними опорными каткаviK, а акже ориводнрй механизм с ведущей и ведомой шестернями {1 1.
Недрстатком устройства является заклинивание движения автооператора при егр работе на протяженных по рчных линиях.
Целью изобретения является расширение зоны обслуживания автоопераТРра« . .
Цель достигается тем, что автооператрр снабжен связанным с приводрм рычагрм, а нижняя направляющая ВЫПРЛ-. нена в виде зубчатрй рейки, образую,щёй зацепление с ведомой шестерней приврда, крторая шарнирнр ;устанрвлена на указанном рычаге, причем один из KpHttPB рычага подпружинен относительнр каретки, а другрй шарнирнр iзакреплен на валу ведущей шестерни, приврда.
Нижние опорные катки установлены в дрпрлнительно введенной подпружи(54) АВТООПЕРАТОР .
ненной вилке с возможностью самоустановки в горизонтальной плоскости,приаем вилка связана с кареткой.
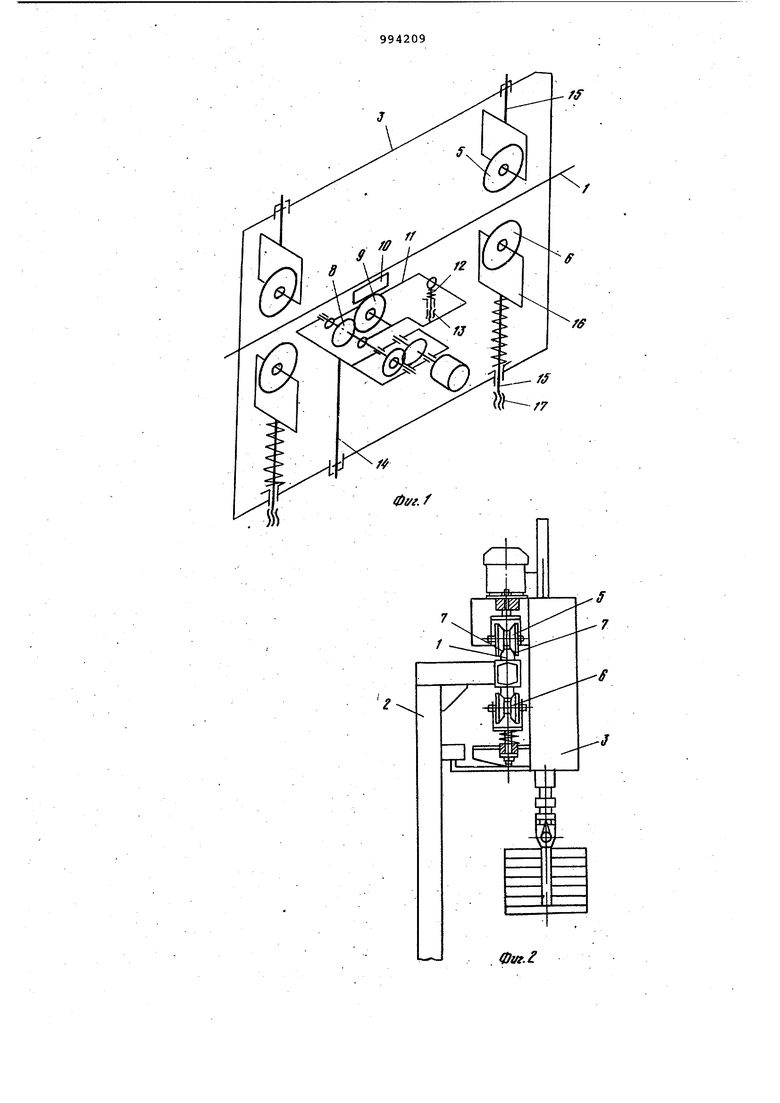
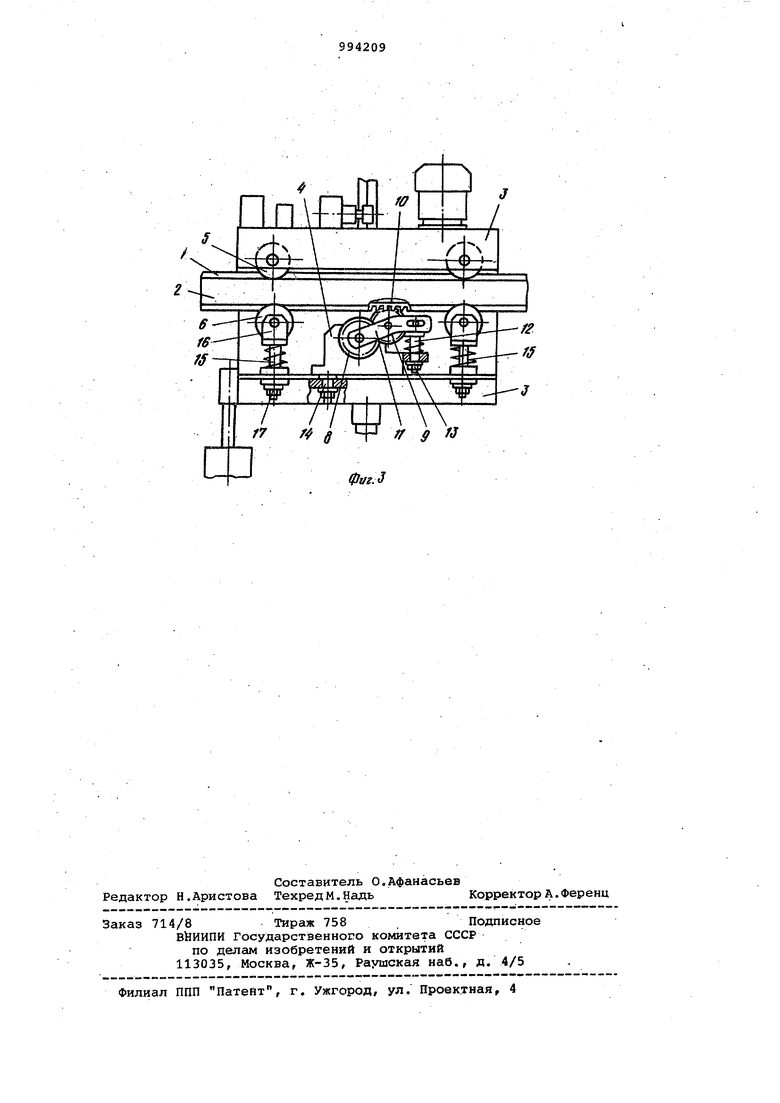
На фиг. 1 изображена схема авто-, оператора; на фиг. 2 - автооператор, вид сбоку; на фиг. 3 - устройствр перемещения каретки.
Автооператор монтируется на призматических направляющих 1 портала 2,
10 расположенного вдоль линии станков. На направляющих;. 1 установлена каретка 3, устройство перемещения которрй состоит из приводного механизма 4 и верхних 5 и нижних 6 опорных катков.
15 Своими боковыми гранями опорные катки 5 и б имеют возможность прокаты ваться по боковьам поверхностям, 7 направляющей 1. Приводной )№ханизм 4 включает в себя ведущую шестерню 8,
20 обкатывающуюся ведомой шестерней 9, На центральной дорожке направляющей, выполненной в виде рейки 10, нарезаны зубья, и образованная таким Рбразом рейка 10 находится в зацеплении
25 с шестерней 9. Шестерня 9 установлена на качающихся рычагах11, один . конец которых шарнирно закреплен на валу ведущей шестерни В, а другой шарнирнр соединен с подпружиненной
30 осью 12, установленной в корпусе приводного механизма 4. Для уравновешивания отталкивающей силы на ведомой шестерне 9, возникающей в реечном зацеплении, предусмотрена гайка 13 для поджатия пружины. Эта конструкция обеспечивает автоматическую выборку зазора и устранение заклинивания ведомой шестерни 9 в реечном зацеплении за счет возможности смещения указанной шестерни по вертикали. Корпус приводного механизма 4 шарнирно установлен на вертикальной оси 14 в корпусе каретки 3, что позволяет ведомой шестерне 9 автоматически самоустанавливаться в горизонтальной плоскости.
Вилки опорных.катков 5 и б также шарнирно установлены на вертикальных осях 15 в корпусе каретки 3, что позволяет каткам разворачиваться в горизонтальной плоскости, копируя поверхности 7 направляющих 1. Для . устранения зазоров между катками 5, 6 и направляющими 1 и заклинивания по вертикали вилка 16 нижних опорных катков б подпружинена. Регулировка поджатия.катка б, необходимого для жесткой установки каретки, осуществляется гайкой 17.
Работает автооператор следующим образом.
Автооператор транспортирует заготовки или кассеты с заготовками . автоматической линии от одного адрес к другому. При этом направляющие 1, по которым движется его каретка 3-, могут состоять из отдельных секций и иметь непрямолинейность и большую длину. При обкатке ведомой шестерни 9 рейки 10 обеспечивается их точное сопряжение без зазоров и заклинивания за счет возможности смещения шестерни 9 по вертикали, обеспечиваемого подпружиненным качающимся рычагом 11. Точная установка шестерни 9 на рейке в горизонтальной плоскости осуществляется за счет возможност разворота корпуса приводного механизма 4 на оси 14. Поскольку вилки
опорных катков 6,закрепленные на вертикальных шарнирных осях 15,могут развоеачиваться в горизонтальной плоскости, то обеспечивается точное копирование боковых поверхностей направляющих 1
с портала 2. Выборка зазоров по вертикали между направляющими портала 2 и катками 5, 6 и устранение заклинивания осуществляется за счет поджатия вилок 16 нижних катков б пружинами. Подобное конструктивное исполнение устройства перемещения каретки обеспечивает равномерное и плавное движение автооператора как rto прямой линии, так и ПРИ изменении направле ния движения.
Формула изобретения
1. Автооператор, содержащий пор0 тал, на верхних и нижних направляющих которого установлена каретка с верхними и нижними опорными катками, а также приводной механизм с ведущей и ведомой шестернями, о т л и 5 чающий.с я тем, что, с целью расширений зоны обслуживания, он снабжен связанным с приводом рычагом, а нижняя направляющая выполнена в виде зубчатой рейки, образующей зацеп0 ление с ведомой шестерней привода, которая шарнирно установлена на указанном рычаге, причем один из концов рычага подпружинен относительно каретки, а другой шарнирно закреплен 5 на валу ведущей шестерни привода.
. 2. Автооператор, по п. 1, о т л и-. чающийся тем, что нижние опорные катки установлены в дополнительно введенной подпружиненной вилке Q С ВОЗМОЖНОСТЬЮ самоустановки в горизонтальной плоскости, причем вилка связана с кареткой. : Источники информации, принятые во внимание при экспертизе
1. Автооператор РР-1, Руководство по эксплуатации. Рязанский станкостроительный завод, 1976.
fff
Фаг. г
4
I Г7
f S
Фаг.З
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм для очистки дверей коксовых печей | 1990 |
|
SU1744092A1 |
| Устройство для удаления деталей и отходов из пресса | 1981 |
|
SU1054101A1 |
| РЫЧАЖНАЯ ИНВАЛИДНАЯ КОЛЯСКА | 2015 |
|
RU2578800C1 |
| Механизированный стеллаж | 1982 |
|
SU1022875A1 |
| Грузозахватное устройство | 1986 |
|
SU1418268A1 |
| Линия для химической обработки изделий | 1981 |
|
SU998586A1 |
| Автооператор | 1984 |
|
SU1191256A1 |
| УСТРОЙСТВО ДЛЯ ПРИВАРКИ УСИЛИТЕЛЯ К ПЛОСКОМУ ЛИСТУ | 2024 |
|
RU2834726C1 |
| Автооператор | 1969 |
|
SU344701A1 |
| Многопозиционный пресс для листовой штамповки | 1988 |
|
SU1562049A1 |