(54) ЗАГРУЗЧИК ЛИСТОВЫХ МАТЕРИАЛОВ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для загрузки листовых материалов | 1985 |
|
SU1284915A1 |
| Многопозиционный станок | 1987 |
|
SU1454652A1 |
| Автоматизированный комплекс для листовой штамповки | 1979 |
|
SU774722A1 |
| Способ отделения верхнего листа от стопы и подачи его в зону обработки и устройство для его осуществления | 1986 |
|
SU1375388A1 |
| Устройство для сортирования листовых материалов | 1989 |
|
SU1751129A1 |
| Автоматический центр распила | 2017 |
|
RU2668314C1 |
| Автоматизированная установка для перфорации листовых заготовок | 1983 |
|
SU1091965A1 |
| УСТРОЙСТВО ДЛЯ ФРЕЗЕРОВАНИЯ ПО КОНТУРУ ЛИСТОВ | 1973 |
|
SU364457A1 |
| СТАНОК ДЛЯ ПОЛИСТНОЙ ПРИРУБКИ КРОМОК ЛИСТОВОГО МАТЕРИАЛА | 1967 |
|
SU191771A1 |
| Станок для правки пластин | 1989 |
|
SU1706761A1 |
1
Изобретение относится к загрузочным устройствам и может быть использовано во всех отраслях народного хозяйства для подачи тонколистовых плитных материалов из стопы в станок, а также для укладки деталей псюле офаботки на станке в стопу.
Известен загрузчик листовых материалов, содержащий установленные на станине стол для стопы л1Лггов, приводную траверсу, несущую захваты и транспорти- руюнше валики L.
Недостатком известного устройства является ненадежное отделение нескольких листов одновремерю, в том числе длинномерных и изогнутых
Целью изо фетения является п овышенке надежности работа устройства.
Указанная цель дортигается тем, что загрузчик листовых материалов, содержащий установленные на станине стол для стопы листов, приводную траверсу, несущую захваты и транспортирующие валикн, имеет подающие валики, располсь
женнлле один под другим перед транс тирующими валиками, по ходу техноло.. ческого процесса, причем верхний валик имеет привод и смонтирован на станине / а нижний установлен с возможностью г/ качания, посредством пневмогошиндра ,я щарнирно-рычажной системы, при захваты траверсы представляют собой две пары пневмоийлиндров, кшкдая из которых несет соответственно бащмак с
to фиксирующими пальцами и поддерживающий рычаг для листа.
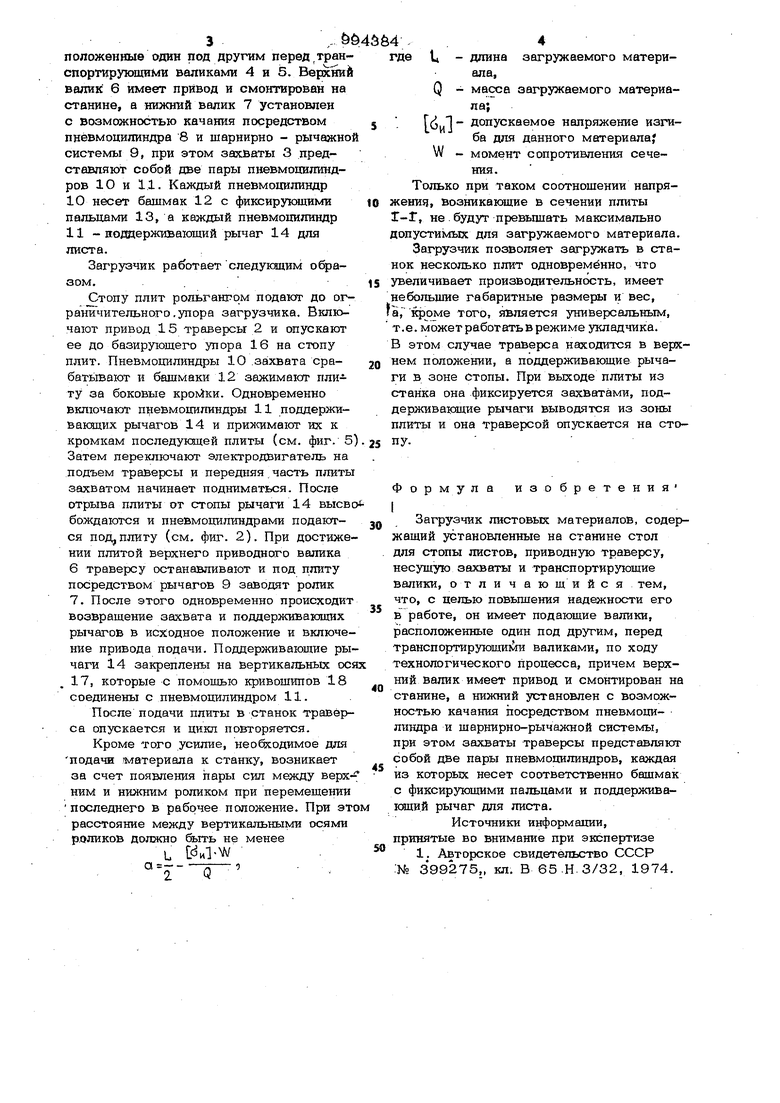
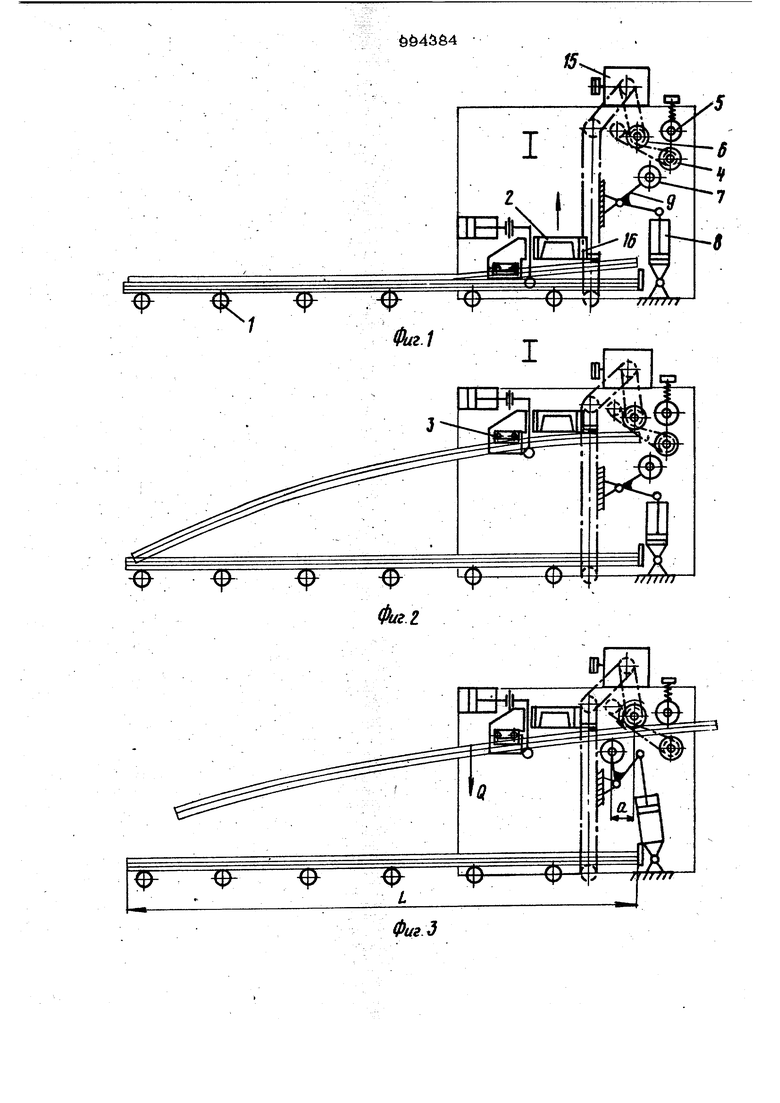
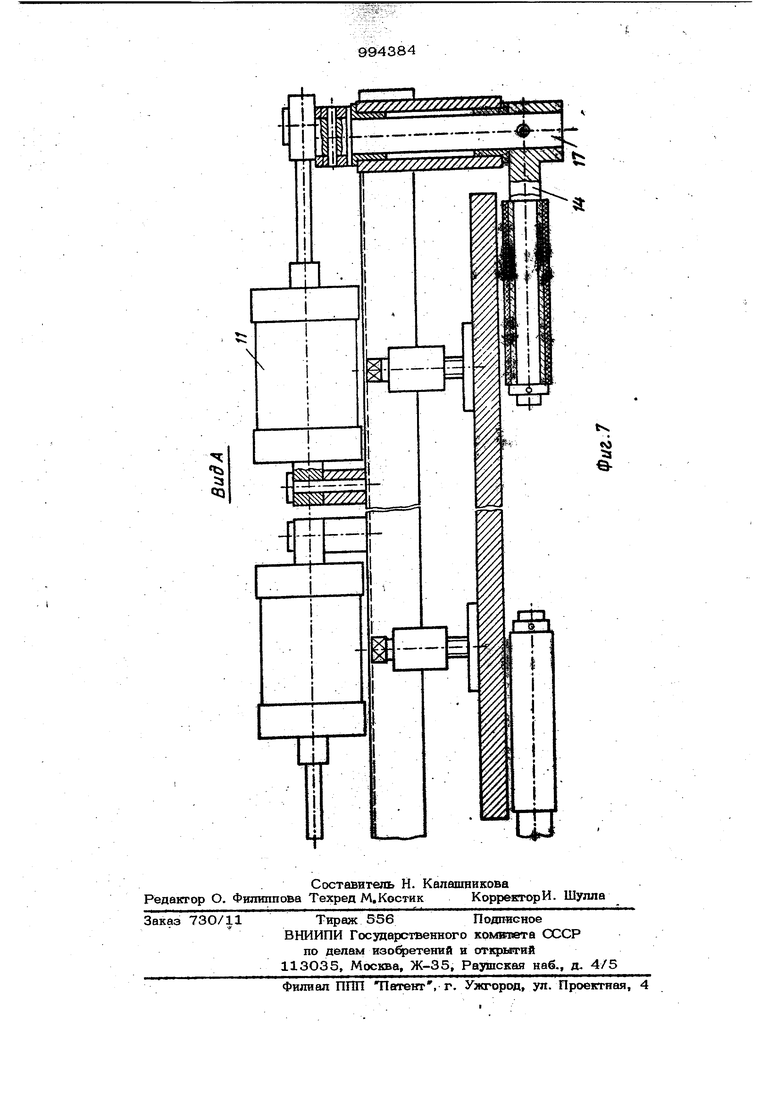
Нафиг.1,2 и 3 изображена принципиальная схема устройства с раалнч|1ым положением траверсы; Ш1ф(1г.4, 5и 6-приншшиаль15ная схема захвата в р13зличных его Положениях; на фиг. 7 - вид-А фиг. 6.
Загрузчик Л1ютовых материалов содержит установленные на станине стол для СТСЯ1Ы листов 1, который может
70 бглъ выполнен в виде рольганга, приводную траверсу 2, несущую захваты 3 и транспортнрзпвошие валики 4 и 5. Загрузчик имеетподакхцие валики 6 и 7, рас&положенные один под другим перед,транспортирующими валиками 4 и 5. Веркний валик 6 имеет привод и смонтирован на станине, а нижний валик 7 установлен с возможностью качания посредством пнёвмоцилиндра 8 и шарнирно - рычажно системы 9, при этом захваты 3 представляют собой две пары П11евмо1шпгиндров 1О и 1.1. Каждый пневмоцияиндр 10несет башмак 12с фиксирукнцими пальцами 13, а каждый пневмонилиндр 11- поддерживающий рычаг 14 для листа. Загрузчик работает следукщим образом.. Стопу плит рольгангом подают до о.граничительного.упора загрузчика. Включают привод 15 траверсы 2 и опускают ее до базирующего упора 16 на стопу плит. Пневмоцилиндры 10 .захвата ерабатьюают и башмаки 12 зажимают плиту за боковые . Одновременно включают Пневмоцилиндры 11 поддерживающих рычагов 14 и прижимают их к кромкам последующей плиты (см. фиг. 5 Затем переключают электродвигатель на подъем траверсы и передняя часть плиты захватом начинает подниматься. После отрыва плиты от стопы рычаги 14 выев бо.ждаются и пневмоцилиндрами подаются под,плиту (см. фиг. 2). При достиже нии плитой верхнего приводного валика 6 траверсу останавливают и под плиту посредством рычагов 9 заводят ролик 7. После этого одновременно происходит возвращение захвата и поддерживающих рычагов в исходное положе1ше и включение привода подачи. Поддерживающие ры чаги 14 закреплены на вертикальных ос 17, которые с помощью кривошипов 18 соединены с пневмоцилиндром 11. После подачи плиты в станок траверса опускается и цикл повторяется. Кроме того усилие, необходимое для подачи материала к станку, возникает за счет появления пары сил между верхним и нижним роликом при перемещении последнего в рабочее положение. При эт расстояние между вертикальными осями р.(}ликов должно быть не менее U 4 где U - длина загружаемого материала, Q - масса загружаемого материала; допускаемое напряжение изгиба для данного материала/ W - момент сопротивления сечения. Только при таком соотношении напряжения, возникакщие в сечении плиты Х-Г, не . будут превьпиать максимально допустимых для загружаемого материала. Загрузчик позволяет загружать в станок несколько плит одновременно, что увеличивает производительность, имеет небольшие габаритные размеры и вес. а, icpoMe того, является универсальньпл, т.е.можетработатьврежиме укладчика. В этом случае траверса находится в верхнем пололсении, а поддерживающие рычаги в зоне стопы. При выходе плиты из станка она фиксируется захватами, поддерживающие рычаги выводятся из зоны плиты и она траверсой опускается на стопу. Формула изобретения Загрузчик листовых материалов, содержащий установленные на станине стол для стопы листов, приводную траверсу, несущую захваты и транспортирующие валики, отличающийся тем, что, с целью повьпиения надежности его в работе, он имеет подающие валики, расположенные один под другим, перед транспортирующий валиками, по ходу технологического процесса, причем верхний валик имеет привод и смонтирован на станине, а нижний установлен с возможностью качания посредством пнёвмоцилиндра и шарнирно-рычажной системы, при этом захваты траверсы представляют собой две пары пневмоцилиндров, каждая из которых несет соответственно башмак с фиксирующими пальцами и поддерживающий рычаг для листа. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР :№ 399275„ кл. В 65.Н. 3/32, 1974.
Фиг I
ФигЗ
