(54) КОВОЧНЫЙ МАНИПУЛЯТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| Ковочный манипулятор | 1980 |
|
SU893385A1 |
| Привод волочильного барабана | 1982 |
|
SU1072944A1 |
| Ковочный манипулятор | 1983 |
|
SU1156795A1 |
| Клещевой захват ковочного манипулятора | 1983 |
|
SU1134275A1 |
| Клещевой захват ковочного манипулятора | 1986 |
|
SU1323200A1 |
| Манипулятор | 1989 |
|
SU1796335A1 |
| Ковочный комплекс | 1991 |
|
SU1787639A1 |
| Ковочный манипулятор | 1979 |
|
SU848138A1 |
| ОБЛИЦОВОЧНЫЙ МАНИПУЛЯТОР | 1990 |
|
RU2023582C1 |
| Автоматическая линия для изготовления деталей типа топоров | 1989 |
|
SU1727945A1 |
1
Изобретение относится к обработке металлов давлением и может быть использовано в кузнечно-прессовых цехах машиностроительных предприятий.
Известен ковочный манипулятор, содержащий основание, выполненное с зубчатым вейцом, размещенную на основании поворотную раму, клещевой захват, установленный консольно йа поворотной раме, и приводной механизм позиционирования по воротной рамы .
Недостатком известного манипулятора является низкая точность манипулирования из-За наличия зазоров в зацеплениях, наибольшим из которых является зазор в зацеплении механизма позиционирования , с зубчатым венцом. Это приводит к увеличению времени точной установки заготовки на бойке пресса.
Цель изобретения - повыщениё точности позиционирования за счет обеспечения возможности выборки заз0ров в зацеплениях.
Поставленная цель достигается тем, что в ковочном манипуляторе, содержащем основание, выполненное с зубчатым вейцом, размещенную на основании поворотную раму, клещевой захват, установленный консольно на поворотной раме и приводной механизм позиционирования поворотной рамы, последний выполнен в виде установленного на поворотной раме параллельно
5 ее оси подпружиненного вала с косозубой щестерней, связанного посредством установленного на нем зубчатого колеса приводом механизма, к двух валов-щестерен, размещенных параллельно оси поворотной
,Q рамы с возможностью зацепления своими шестернями с зубчатым венцом основания, один из которых связан с косозубой шестерней подпружиненного вала, а другой - с дополнительной косозубой щестерней, установленной также на подпружиненном валу,
15 при этом косозубые шестерни подпружиненного вала выполнены с противоположным зацеплением.
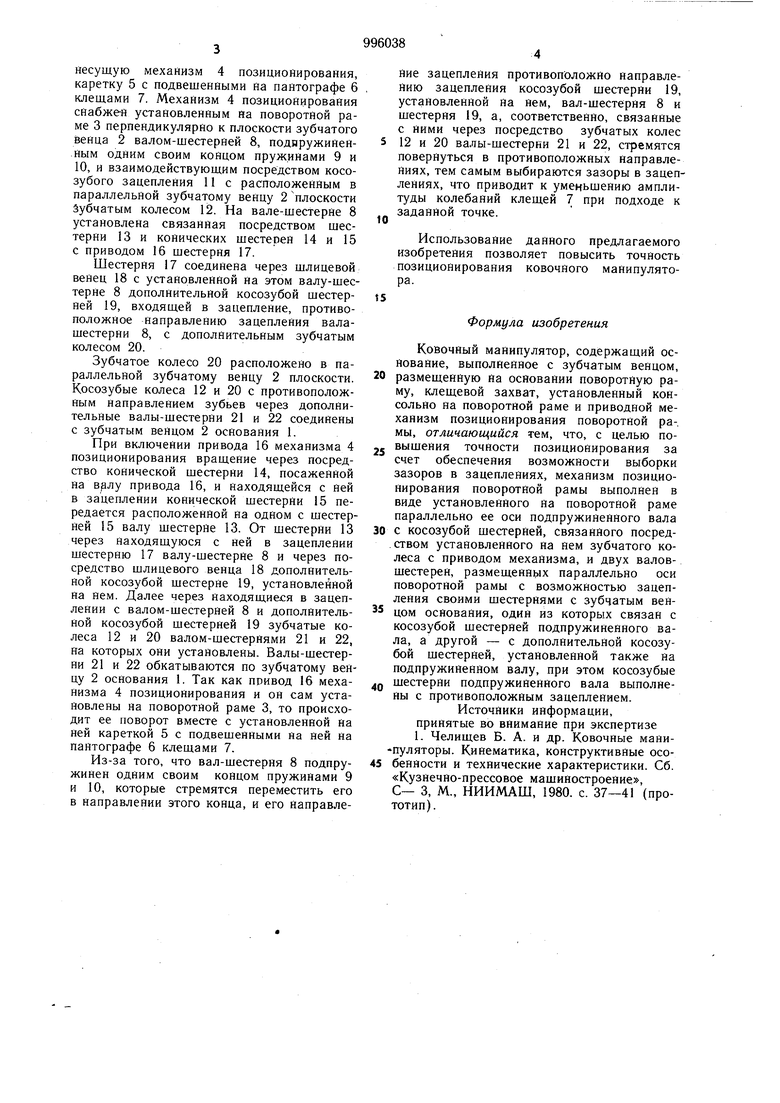
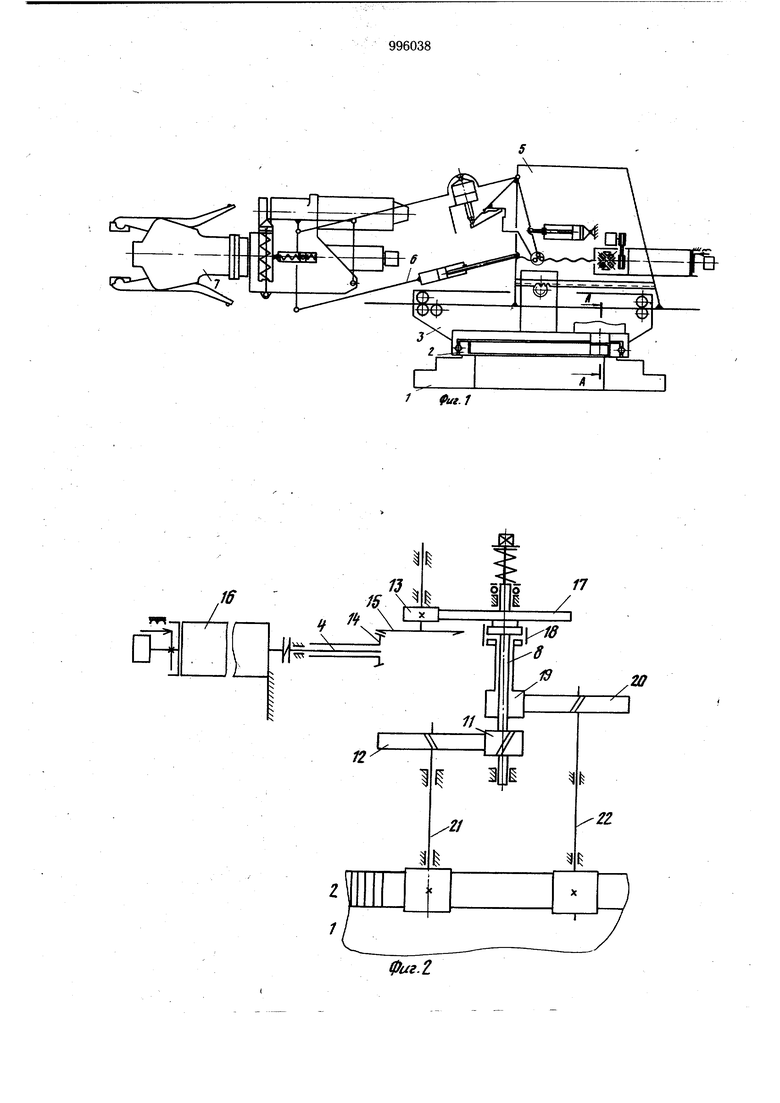
На фиг. 1 изображена кинематическая схема манипулятора; йа фиг. 2 - кинематическая связь привода механизма позицио20нирования ; с зубчйтым венцом основания; на фиг. 3 - разрез А-А на фиг. 1. Ковочлый манипулятор содержит размещенную на основании 1, выполненном с зубчатым венцом 2, поворотную раму 3,
несущую механизм 4 позиционирования, каретку 5 с подвешенными на пантографе 6 клещами 7. Механизм 4 позиционирования снабжен установленным на поворотной раме 3 перпендикулярно к плоскости зубчатого венца 2 валом-щестерней 8, поднружиненным одним своим концом пружинами 9 и 10, и взаимодействующим посредством косозубого зацепления 11 с расположенным в параллельной зубчатому венцу 2 плоскости Зубчатым колесом 12. На вале-шестерне 8 установлена связанная посредством шестерни 13 и конических шестерен 14 и 15 с приводом 16 шестерня 17.
Шестерня 17 соединена через шлицевой венец 18 с установленной на этом валу-шестерне 8 дополнительной косозубой шестерней 19, входящей в зацепление, противоположное направлению зацепления валашестерни 8, с дополнительным зубчатым колесом 20.
Зубчатое колесо 20 расположено в параллельной зубчатому венцу 2 плоскости. Косозубые колеса 12 и 20 с противоположным направлением зубьев через дополнительные валы-шестерни 21 и 22 соединены с зубчатым венцом 2 основания 1.
При включении привода 16 механизма 4 позиционирования вращение через посредство конической шестерни 14, посаженной на врлу привода 16, и находящейся с ней в зацеплении конической шестерни 15 передается расположенной на одном с шестерней 15 валу шестерне 13. От шестерни 13 через находящуюся с ней в зацеплении щестерню 17 валу-щестерне 8 и через посредство шлицевого венца 18 дополнительной косозубой шестерне 19, установленной на нем. Далее через находящиеся в зацеплении с валом-шестерней 8 и дополнительной косозубой шестерней 19 зубчатые колеса 12 и 20 валом-шестернями 21 и 22, на которых они установлены. Валы-шестерни 21 и 22 обкатываются по зубчатому венцу 2 основания 1. Так как привод 16 механизма 4 позиционирования и он сам установлены на поворотной раме 3, то происходит ее поворот вместе с установленной на ней кареткой 5 с подвешенными на ней на пантографе 6 клещами 7.
Из-за того, что вал-шестерня 8 подпружинен одним своим концом пружинами 9 и 10, которые стремятся переместить его в направлении этого конца, и его направление зацепления противоположно направлению зацепления косозубой шестерни 19, установленной на нем, вал-шестерня 8 и шестерня 19, а, соответственно, связанные с ними через посредство зубчатых колес 12 и 20 валы-шестерни 21 и 22, стремятся повернуться в противоположных направлениях, тем самым выбираются зазоры в зацеплениях, что приводит к уменьшению амплитуды колебаний клещей 7 при подходе к
заданной точке.
Использование данного предлагаемого изобретения позволяет повысить точность позиционирования ковочного манипулятора.
Формула изобретения
Ковочный манипулятор, содержащий основание, выполненное с зубчатым венцом,
размещенную на основании поворотную раму, клещевой захват, установленный консольно на поворотной раме и приводной механизм позиционирования поворотной ра-. мы, отличающийся тем, что, с целью повышения точности позиционирования за счет обеспечения возможности выборки зазоров в зацеплениях, механизм позиционирования поворотной рамы выполнен в виде установленного на поворотной раме параллельно ее оси подпружиненного вала
с косозубой шестерней, связанного посред.ством установленного на нем зубчатого колеса с приводом механизма, и двух валовшестерен, размещенных параллельно оси поворотной рамы с возможностью зацепления своими шестернями с зубчатым венцом основания, один из которых связан с косозубой шестерней подпружиненного вала, а другой - с дополнительной косозубой шестерней, установленной также на подпружиненном валу, при этом косозубые
шестерни подпружиненного вала выполнены с противоположным зацеплением.
Источники информации, принятые во внимание при экспертизе 1. Челищев Б. А. и др. Ковочные мани-пуляторы. Кинематика, конструктивные особенности и технические характеристики. Сб. «Кузнечно-прессовое машиностроение, С- 3, М., НИИМАШ, 1980. с. 37-41 (прототип).
01
Фиг.г
