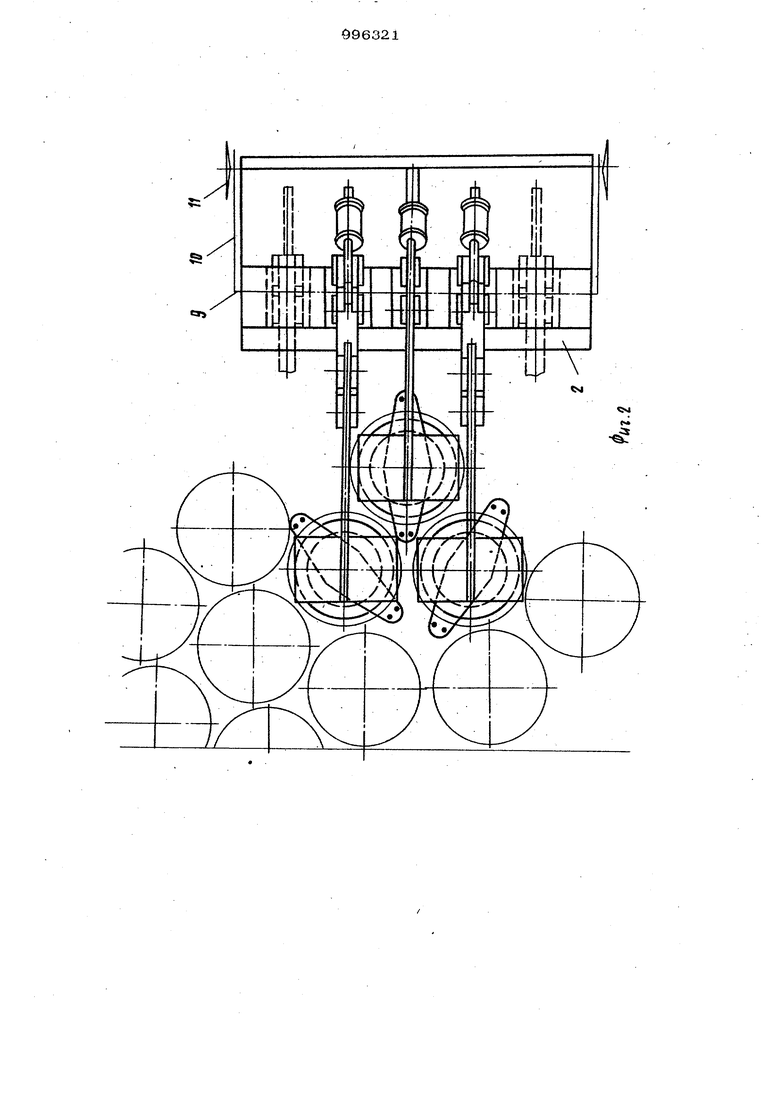
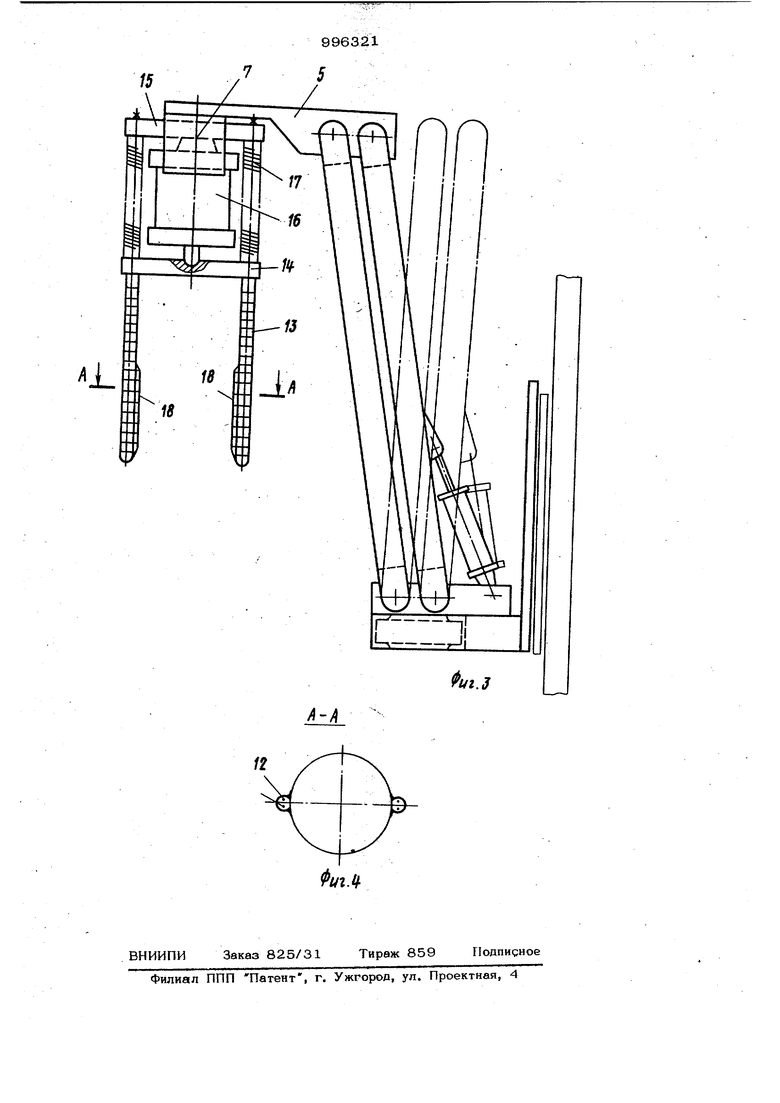
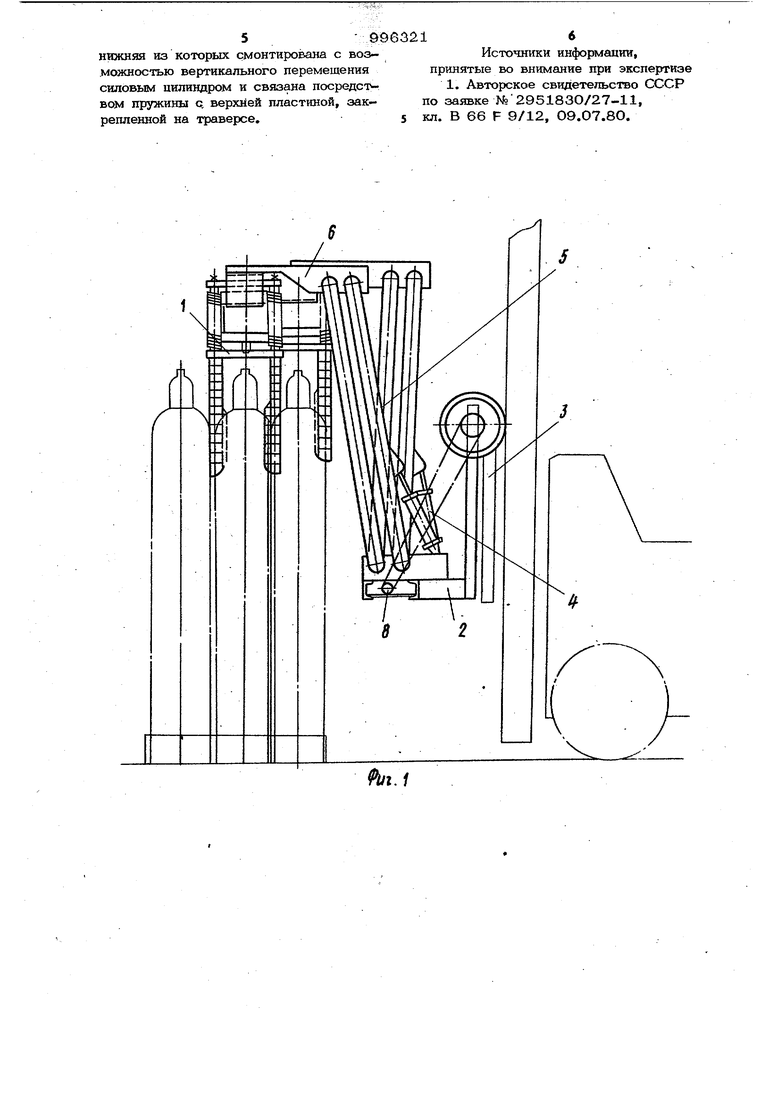
Изобретение относится к подъемнотранспортному машиностроению, в HJacTности к механизации погрузочно-разгру- зонных работ при складировании и транспортировке газовых баллонов, i Известно навесное оборудование к погрузчику для перевозки газовых баллонов содержащее навешиваемую на каретку погрузчика раму и групповой захват, связанный с приводом Недостатком известного оборудования является то, что при его работе необходима предварительная группировка баллонов, связанная с ручными операциями и снижающая производительность труда при вьшолнений погрузочно-разгрузочшмзс работ с вертикально расположенными газовыми баллонами. Цель изобретения - повышенне проиэводительности труда путем исключения ручных операций при захвате баллойов. Цель достигается тем, что навесное оборудование к погрузчику: для перевозки газовых баллонов снабжено траверсой, смонтированной на раме с возможностью продольного перемещения силовым оиллощром относительно последней посредством параллелограммного механизма, а групповой захват состоит по крайней мере из трех поворотных в горизонтальной плоскости захватных элементов, ось поворота среднего из которых закреплена на траверсе неподвижно, а оси поворота крайних - с возможностью поперечного перемещения относительно рамы винтовым приводом. Каждый захватный элемент состоит по крайней мере из двух гибких стержней с наборными втулками на свободных концах, установленных между двумя пластинами, НИЖН5Ш из которых смонтирована с можностью вертикального перемещения силовым цилиндром и связана посредством пружины с верхней пластиной, закрепленной на фраверсе. На фиг. 1 показано навесное оборудо вание, общий вид; на фиг. 2 - то же. ввд сверху; на фиг. 3 - захватшлй элемент; на фиг. 4 - сечение А-А на фиг. 3 Навесно«з оборудование к погрузчику состоит из группового захвата 1, смонтированного на раме 2, закрепленной на каретке 3. На раме 2 установлена посре ством параллелограммного механизма 5 с возможностью продольного перемещени силовым цилиндром 4 траверса 6. Групповой захват для газовых баллонов состоит по крайней мере из трех поворотных в горизонтальной плоскости захватных элементов 7. Ось поворота среднего захватного элемента смонтирована на траверсе 6 неподвижно, а оси поворота крайних - с возможностью поперечного перемещения относительно рамы 2 винтовым приводом 8, состоящим из винтовой пары 9, цепной передачи 1О и штурвала 11. Каисдый захватный элемент состоит по крайней мере из двух гибких стержней 12 с наборными втулками 13 на свободных концах. Стержни 12 устано лены между двумя пластинами 14 и 15, нижняя из которых смонтирована с возмолодостью вертикального перемещения силовым цилиндром 16 и связана посредством пружины 17 с верхней пластиной, зш репле1шой на траверсе 6. Втулки 13 снабжены лепестками 18 и армированы антифрикционным материалом, например резиной. Работа навесного оборудования к погрузншсу заключается в следующем. Погрузчик подъезжает к находящимся в вертикальном положении газовым баллонам, расположенным с возможностью захвата трех баллонов одновременно. Групповой захват 1, смонтированный на раме 2, закрепленной на каретке 3, поднят, и захватные элементы 7 проходят над баллонами. Затем с помощью силового цилиндра 4, а при необходимости и с помощью щтурвала 11 винтового привода 8 водитель ориентирует захватные элементы 7. После этого водитель опускает захватные элементы на необходимую вешгчину, достаточную для надежного захватывания баллонов. За счет гибкости захватного элемента и поворота вместе с траверсой 6 вокруг вертикальной оси про исходит его самонаведение, т.е. захватный элемент, соскальзьшая с конусной части баллонов, заходит в зазоры между ними. Для зажима каждого баллона в сил вой цилиндр 16 подается давление, щток давит на нижнюю пластину 14, передающую усилие втулкам 13, которые плотно прижимаются своими торцами одна к другой, скользя по гибким стержням 12. За счет наличия скосов на торцах втулок 13 захватные элементы изгибаются в радиальном направлении к центру и сжимают баллоны с необходимым усилием. После этого баллоны поднимаются над уровнем поля и транспортируются к месту назначения. Снятие баллонов с навесного оборудования и складирование производится в обратной последовательности. Эффективность предлагаемого навесного оборудования к погрузчику заключается в увеличении производительности труда за счет возможности захвата нескольких вертикально расположенных газовых баллонов. Выполнение в групповом захвате гибких захватных элементов позволяет обеспечить их самонаведение на баллоны без группировки, что исключает трудоемкость ручных операций. На предприятии при использовании предлагаемого оборудования может быть высвобождено 5-6 человек, занятых ручной перегрузкой баллонов. Формула изобретения 1.Навесное оборудование к погрузчику для перевозки газовых баллонов, содержащее навешиваемую на каретку погрузчика раму и групповой захват, связанный с приводом, отличающееся тем, что, с целью повышения производительности труда путем исключения ручных операций при захвате баллонов, оно снабжено траверсой, смонтированной на раме с возможностью продольного перемещения силовым цилиндром относительно последней посредством параллелограммного механизма, а групповой захват состоит по крайней мере из трех поворотных в горизонтальной плоскости захватных элементов, ось поворота среднего из которых закреплена на траверсе неподвижно, а оси поворота крайних - с возможностью поперечного перемещения относительно рамы винтовым приводом. 2.Оборудование к погрузчику по п. 1, отличающееся тем, что каждый захватный элемент состоит по крайней мере из двух гибких стержней с наборнь ми втулками на свободных концах, установленных между двумя пластинами. 5- 9 нижняя из которых смонтирована с возможностью вертикального перемещения силовым цилиндром и связана посредсрвом пружины с. верхней пластиной, закрепленной на траверсе. 1 Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР по заявке №2951830/27-11, кл. В 66 F 9/12, 09.07.8О.
| название | год | авторы | номер документа |
|---|---|---|---|
| Навесное грузозахватное устройство к погрузчику | 1980 |
|
SU912632A1 |
| Захват для деревянных бочек к погрузчику | 1988 |
|
SU1548155A1 |
| НАВЕСНОЙ МАНИПУЛЯТОР С ВИЛЬЧАТЫМ ЗАХВАТОМ | 2021 |
|
RU2760476C1 |
| Захватное устройство к погрузчику | 1978 |
|
SU749798A1 |
| ПОДВЕСНОЙ МАНИПУЛЯТОР ДЛЯ КАНТОВКИ, ПРОТЯЖКИ, СБОРКИ, ЗАЛИВКИ ЛИТЕЙНЫХ ФОРМ И ВЫДАВЛИВАНИЯ ФОРМОВОЧНОЙ СМЕСИ И ОТЛИВКИ ИЗ ОПОКИ | 2004 |
|
RU2346789C2 |
| Навесной подъемник | 1990 |
|
SU1754640A1 |
| Устройство для отделения плоской заготовки от стопы и подачи ее к обрабатывающей машине | 1983 |
|
SU1098623A1 |
| Захват для деревянных бочек к погрузчику | 1981 |
|
SU983029A1 |
| Групповой захват автомата-укладчикаКиРпичА-СыРцА HA ВАгОНЕТКу | 1972 |
|
SU814756A1 |
| ЗАХВАТ ДЛЯ ГРУППЫ ДЕРЕВЯННЫХ БОЧЕК К ПОГРУЗЧИКУ | 1991 |
|
RU2023649C1 |